发动机曲轴信号倍频与喷射系统控制研究
2021-03-25汤惠淞吴长水
汤惠淞,吴长水
(上海工程技术大学机械与汽车工程学院,上海 201620)
0 引言
随着电子控制技术的发展,发动机位置管理由原来的机械式发展到精确的电子控制,通过传感器对曲轴和凸轮轴信号的采集和算法标记,可确定发动机实时位置和最佳喷射正时,实现对喷射系统的实时控制。黄宇[1]研究双燃料发动机改造关键技术,即对喷射系统的改造技术;赵丛姣等[2]研究喷射正时对燃烧规律的影响,即实现喷射系统精确控制,发现燃油喷射系统参数喷射提前角、喷射正时控制等对发动机的燃烧特性、经济性和排放性等有重要影响;杨骐菲等[3]对曲轴信号处理和倍频进行研究,发现有效的倍频信号可提高喷射系统控制精度;张晖等[4]、李利平等[5]对双燃料发动机的喷射系统进行研究,精确的喷射系统控制都是以准确的曲轴信号为基准,因此曲轴信号精度将影响整个发动机的性能。本文根据TC1728 微控制器的丰富资源,设计高精度倍频曲轴信号算法,可从倍频后的曲轴信号获取丰富的发动机位置信号,实现对发动机精准的喷射控制。
1 控制单元
1.1 微控制器TriCore1728
本文以英飞凌公司AUDO MAX 系列中32 位高时钟频率微处理器TC1728[6]作为主控芯片。TC1728 具有多个内核,其中央处理器和片上外围设备的工作频率相互独立,中央处理器最高工作频率可达133MHz,片上外围设备工作频率可达80MHz。还具有精简指令集(RISC)处理器构架、数字信号处理器(DSP)操作和寻址模式、片上存储器和丰富的外设资源,如中央处理器(CPU)、多通道模数转换器(ADC)、外围控制处理器(PCP)、通用定时器阵列(GP⁃TA)、微妙级通道(MSC)等。同时,还具有丰富的中断源,具有181 个中断节点,256 个中断优先级可向CPU 和PCP请求中断服务。
1.2 倍频模块GPTA 功能
定时器阵列GPTA 内部包含一组高速数字信号处理单元:滤波和预分频单元(FPC)支持输出信号噪声滤波和预分频操作;占空比测量单元(DCM)实现脉冲周期测量;数字锁相环单元(PLL)在一个输入信号周期中产生数量可编程的模块时钟标记;全局定时器单元(GT)用作全局定时器单元(GTC)的时间基准,GTC 具有捕获/比较功能,多个GTC 可以逻辑级联生成复杂的波形并输出到外部端口;本地定时器单元(LTC)可实现定时、信号捕捉和比较功能,多个LTC 可用于提供触发或门控信号,同时可触发LTC 和GTC 相关操作。GPTA 模块内核关系如图1 所示。
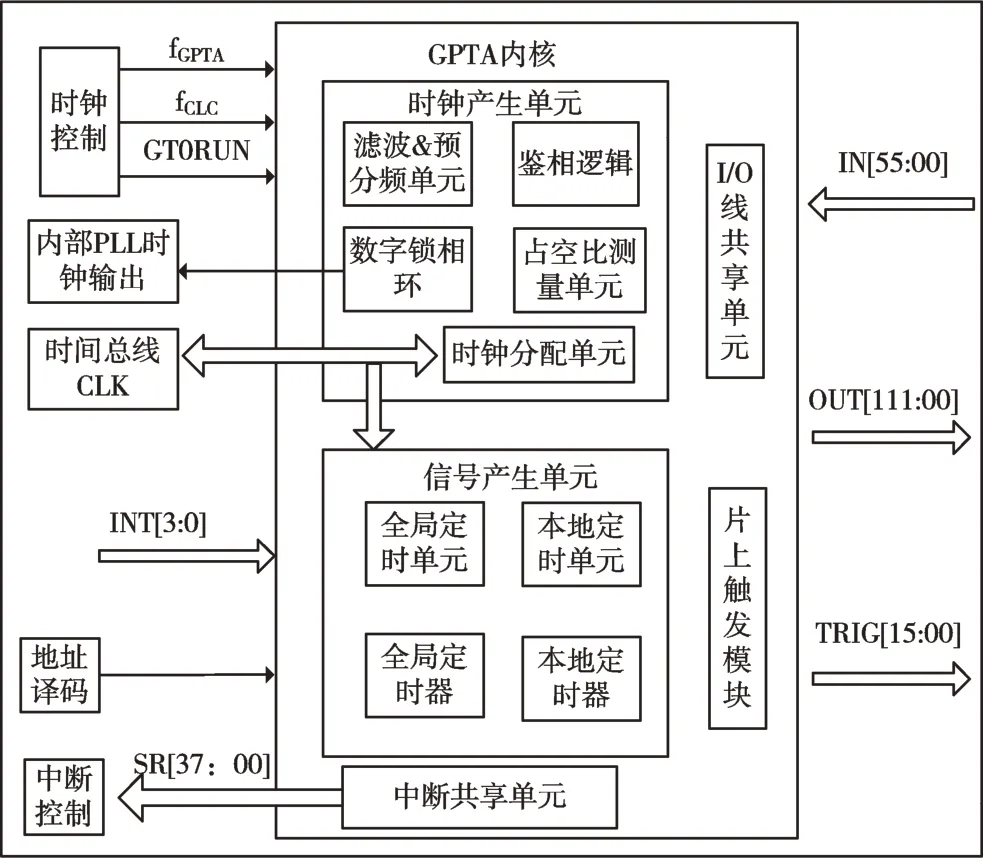
Fig.1 The kernel relationship of GPTA图1 GPTA 内核关系
2 曲轴信号配置
曲轴信号是发动机精准控制的基础,喷射系统主要依托曲轴信号,因此获得有效的曲轴信号,是控制发动机的关键[7]。为获得曲轴信号,一般采用光电传感器和霍尔传感器进行采集[8-10]。但光电传感器输出信号为正弦波信号,必须通过信号处理电路处理后,才能被CPU 处理,增加了电路设计的难度和成本。而霍尔传感器可直接输出方波信号并由GPTA 模块处理,无需特定处理电路,简单方便,本文使用霍尔传感器进行曲轴信号采集。
本文研究对象是四缸四冲程发动机,其曲轴信号盘采用均匀布置的60 个齿[9]。为了获得缸号和上止点位置信息,一般去掉2 个齿,即采用60-2 个齿,并称去掉的齿为缺齿。正常齿产生的方波信号每个周期为6CA,缺齿为18CA。曲轴信号盘和采集信号波形如图2 所示。
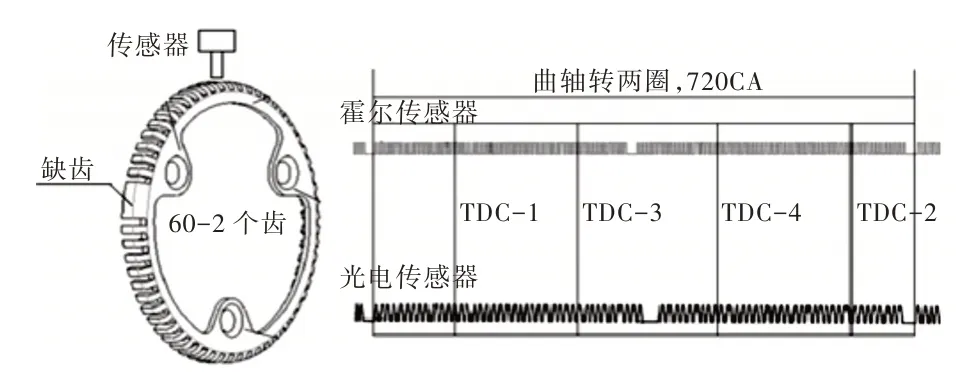
Fig.2 Crankshaft signal panel and signal waveform图2 曲轴信号盘和信号波形
3 曲轴信号倍频算法设计
曲轴信号通过霍尔传感器采集,由滤波电路处理后,将得到的方波信号通过I/O 端口输入到TC1728,由GPTA内核中的各个单元进行倍频处理。倍频后的信号由GTC/LTC 单元生成PWM 波控制喷射驱动单元并进行喷射控制[11-12]。曲轴信号控制喷射系统整个过程如图3 所示。
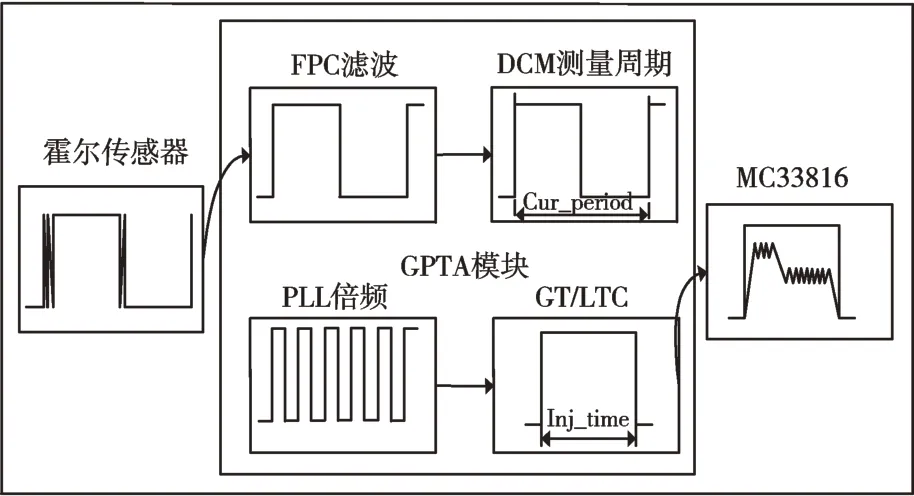
Fig.3 Crankshaft signal flow relationship图3 曲轴信号流动关系
3.1 软件设计
3.1.1 滤波单元FPC
曲轴信号为高频方波信号,容易受到外界干扰,形成错误波形。如果采集到错误的波形,会对后面的控制产生严重影响。利用FPC 对曲轴信号进行滤波处理,得到干净的曲轴信号。FPC 的滤波模式可分为即时去抖滤波法和延迟去抖滤波法。即时去抖滤波法,检测到输入信号边沿后,在编程设定的时间内对输入信号的跳变和毛刺进行滤波;延迟去抖滤波法,用一个比选定的时钟周期和比寄存器值的乘积稍小的信号宽度,对输入信号上的所有跳变和毛刺进行滤波。根据设计需要,对输入信号的滤波用两种滤波法随意组合,本文采用上升沿延迟滤波、下降沿即时滤波。混合滤波模式下的波形如图4 所示。
3.1.2 占空比测量单元DCM
GPTA 模块含有4 个DCM 单元(DCM0-DCM3),每个DCM 由24 位定时器、24 位捕获寄存器、24 位捕获/比较寄存器、24 位比较器和DCM 控制单元组成。测量曲轴周期使用DCM 的定时器/捕获寄存器CAV,设置捕获寄存器为下降沿触发中断,将GPTA 总线时钟fGPTA递增计数至下一次触发,并将捕获的时钟个数保存在寄存器DMU 中。捕获完成后定时器自动复位,重新计数,定时器所记录的一个曲轴齿的周期长度Cur_period=TGPTA*GPTA_DCMCAV0。
本文根据双燃料发动机的额定转速为4 000rpm,曲轴信号的最大频率小于4KHz,将GPTA 模块的时钟频率fGPTA设置为5MHz。由于输入信号不一定是fGPTA的整数倍,故存在最大捕获误差∆δ1为一个周期的TGPTA(图5 为DCM 捕获误差原理图),即在GPTA 总线fGPTA为5MHz 的频率下,DCM 捕获误差时间控制在0.2us 内。对于传统的捕获模式,也会产生相同的误差∆ε1=Tcapture。
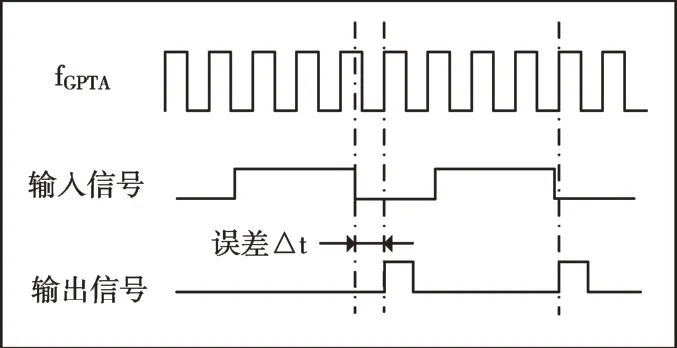
Fig.5 Acquisition error principle of DCM unit图5 DCM 单元捕获误差原理
3.1.3 倍频单元PLL
PLL 是具有倍频功能的数字锁相环单元,在一个输入信号周期内,在规定的时间周期内产生期望数目的时钟脉冲。PLL 还具有自动调速功能,当自动结束模式位(PLLC⁃TR.AEN)置位时,可以根据输入信号的加速和减速进行自动补偿。若自动结束模式复位,PLL 将不与输入信号沿同步连续产生输出脉冲。与传统倍频方式对比可以发现,经过定时阵列GPTA 处理后的倍频信号,误差远小于传统方式,提高了控制精度。图6 为TP=20 个TGPTA下,分频因子n=6 时,两种方式倍频后的波形对比,易得出传统方式形成的波形不均匀,而本文倍频方式信号更均匀有效。
在实际过程中,发动机的转速并不是恒定的,存在加减速过程,因此转速发生变化时,设计的算法应能自动补偿。PLL 具有自动补偿功能,能有效减少倍频信号误差。如在减速情况下,信号周期的长度逐渐变大,因为在PLL设置时GPTA0_PLLMTI 为固定值,在不同的周期长度下将生成相同个数倍频脉冲,因此倍频脉冲的周期会发生变化。脉冲周期不同,对GT 单元波形也产生很大误差。本文设计一种自适应算法,实时监测曲轴信号周期,当监测到曲轴信号周期变化时,将对PLL 中的寄存器GP⁃TA0_PLLMTI 和GPTA0_PLLREV 进行算法控制,提高倍频精度。在转速变化下PLL 倍频波形如图7 所示。
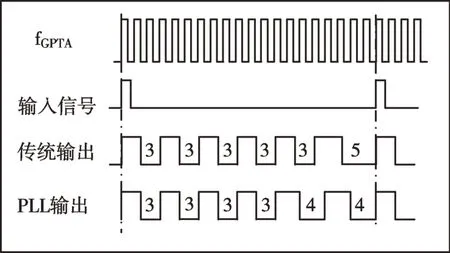
Fig.6 PLL frequency doubling waveform图6 PLL 倍频波形
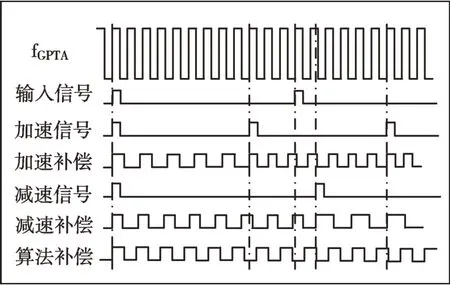
Fig.7 PLL frequency doubling waveform comparison图7 PLL 倍频波形对比
3.2 倍频原理分析与误差分析
经过FPC 滤波后得到干净的曲轴信号,由DCM 测量出周期长度Tp,在PLL 中设置倍频初始值。设置DCM 和PLL 中断,在DCM 中断中,读取实时的周期长度值Tp,在PLL 中断中利用测得的Tp设置算法,得到均匀的倍频信号。经过DCM 测得的实际曲轴信号周期后,输入到PLL进行倍频。DCM 测得的周期长度Tp存在如式(1)所示关系:

PLL 根据测得的周期长度Tp和倍频因子n确定倍频信号周期的长度。倍频因子大小,决定了倍频信号周期的大小。倍频因子越大,倍频后的频率越高,精度越高,反之精度越低。由式(1)可知,PLL 倍频时存在两种情况:一种是曲轴周期长度与倍频因子可整除,只需要计数n次;第二种是不能整除,留有余数,需要计算(n+1)次。PLL 倍频方式通过余数再分配到每个周期上,使周期更加均匀,有效减少了误差,误差最大为:

因此,曲轴信号通过GPTA 模块处理后的最大误差为:

传统的倍频方式是直接除以分频因子n,将余数全部放在最后一个周期上,导致产生误差,最大误差可达:

式中,Tbus为传统倍频时的时钟周期。传统方式曲轴信号处理后的最大误差为:

例如,现以倍频因子n=20,在2 500rpm 转速下,GPTA的总线时钟频率设置为5MHz,DCM 测量出正常齿的周期长度为:

对于一个曲轴正常齿的转角为6CA,通过倍频后,倍频输出信号周期Tt为:

角度误差∆θ为:

因此,总误差为δ=0.006CA,不同转速下,曲轴信号20倍频误差大小如表1 所示。可以得出,在转速800~4 000rpm 时,曲轴倍频信号的最大误差小于0.01CA。虽然随着转速增大,倍频误差有所增加,但依然满足倍频精度要求,倍频结果符合设计要求。
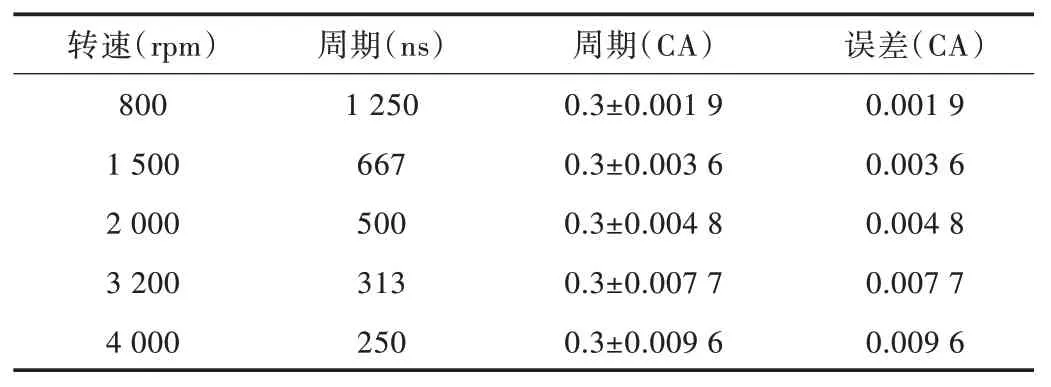
Table 1 20 times frequency of crankshaft signal at different speeds表1 不同转速下曲轴信号20 倍频
4 喷射正时控制应用
进入曲轴信号处理函数crankshaft()运行流程如图8所示。根据DCM 实时测得两次中断之间的时间周期计算发动机速度,获得以PLL 倍频后信号为时钟GT 的当前计数,作为角度计算喷油时刻的基础。如果当前齿长度大于2.5 倍的上一齿长度,即DCMCurCrksft>2.5×DCMLastCrksft,可判断当前发动机位置是曲轴缺齿位置,将Flag_Crank⁃shaft 置1。此时曲轴角度已经同步,可以使用当前同步角度控制喷射时刻。Flag_Syn 复位,等待下一次判缸,使能够更新同步角度。例如,如果同步后的角度SynAngle=705CA,可知当前发动机位置在凸轮轴多齿的下降沿,目前发动机的位置到1 缸TDC1 的角度TDC_Angle1 为:

计算1 缸喷油时刻:

其中,AdvAng为喷油提前角,CapPLLtime是当前GT 的时钟。根据曲轴信号盘设计,可以依次计算出剩余缸的喷射时刻。
转速为2 000rpm 时,1 缸喷射波形如图9 所示(彩图扫OSID 码可见),绿色为喷射脉宽PWM 波,控制喷射正时,黄色为倍频后的曲轴信号,红色为1 缸驱动波形。通过MAP 图可以查得喷油脉宽为2.6ms,对应的曲轴转角为31.2CA。在传统控制下,精度为3CA。喷油脉宽整除3CA部分由曲轴齿数控制,剩余余数由定时器控制,增加了程序设计难度,而且控制精度差。本文根据GPTA 独特功能设计了算法,在倍频系数为20 倍时,曲轴信号的精度为0.03CA,不需要复杂的控制算法,直接对倍频信号计数,就可以实现喷油脉宽的控制。控制算法简单,程序稳定性高。喷射精度也远大于传统控制方式。
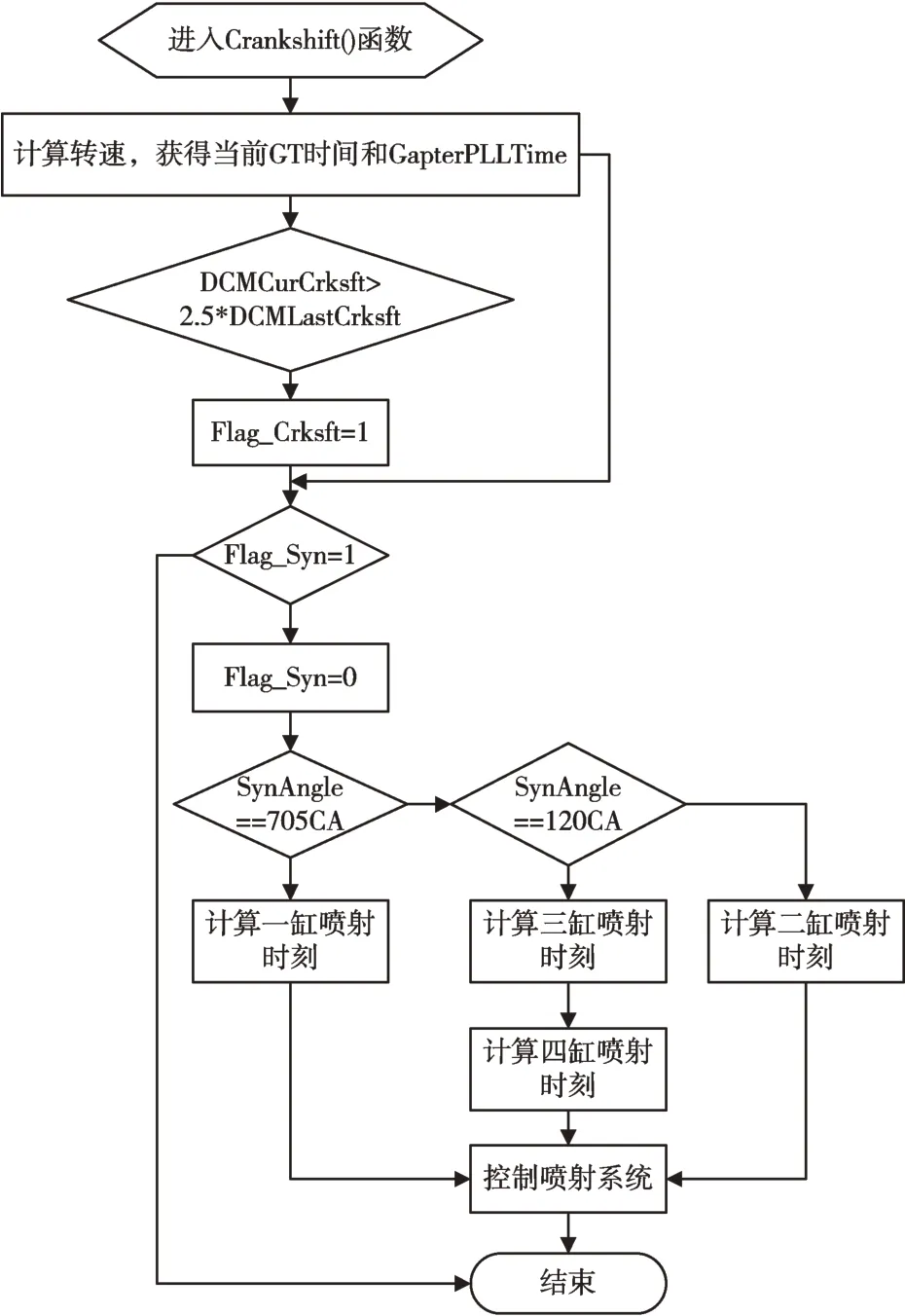
Fig.8 Function flow图8 函数流程
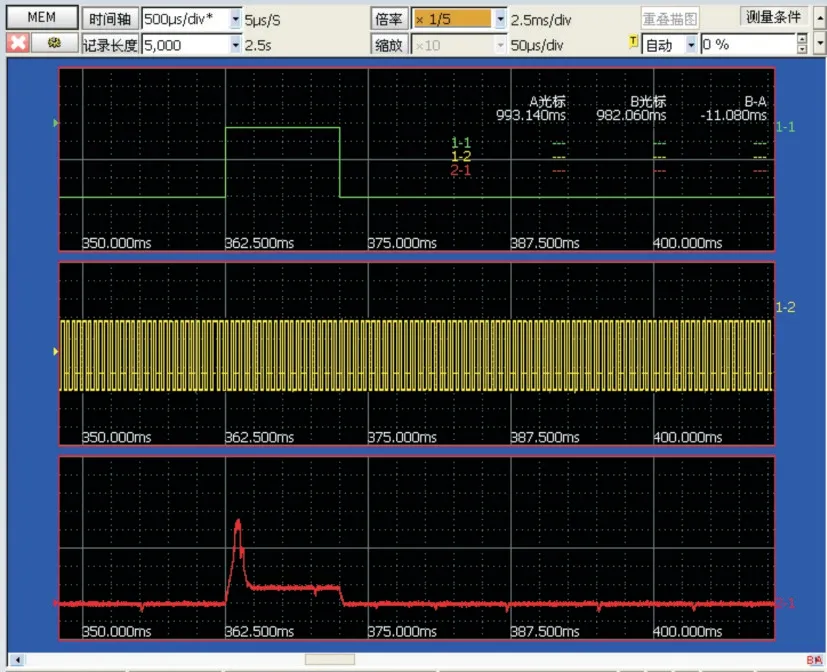
Fig.9 Injection waveform图9 喷射波形
5 结语
本文利用TC1728 芯片的丰富资源,设计了倍频曲轴信号算法,在硬件支持上,简化了算法设计,提高了ECU 的性能利用率。利用GPTA 独特的功能和算法设计,将倍频误差控制在两个GPTA 时钟脉冲内,得到了高精度信号。分析实验结果可知,精准的曲轴信号控制喷射系统更简单、稳定,精度也更高。下一步工作将研究高精度信号在喷射正时控制中对燃烧过程的影响。未来可将开发的软件转化为符合AUTOSAR 架构规范的软件组件,提高移植性。
