一种识别天车吊具运动的新方法
2021-03-12梁宝,霍平
梁 宝,霍 平
(1.华北理工大学机械工程学院,河北 唐山 063210;2.河北省工业机器人产业技术研究院,河北 唐山 063210)
0 前言
在工业快速发展的时代,天车的使用随处可见,目前生产中的大多数天车的控制处于人工操作状态。随着生产需求的扩大,以及自动化水平需求的增加,越来越多的天车需要实现自动化的生产吊装。要实现天车吊具的自动化吊装,首先要解决的就是天车吊放过程中的吊具摆动问题。吊具的摆动,直接影响着天车的工作效率,而且导致天车吊放时货物不能精准的放到目标位置。如果吊具所吊物体在摆动过程中的趋势剧烈,会导致大车和小车在运行轨道上的中心偏移,造成大车和小车的车轮损伤,严重可能导致天车电机等设备的损坏[1],另外还会对人员安全问题产生严重影响。
吊具的摆动在天车的大、小车的组合运动作用下,使得吊具的运动情况更加复杂,对天车的精准控制更为困难。因此吊具相对于天车的摇摆位置及摇摆状态的识别又是自动化防摇摆控制技术中的首要的关键技术。
目前国内吊具自动化作业水平不高,操作人员仅凭经验完成吊具的吊放和定位作业,在作业过程中操作人员需要多次调整才能消除吊具的摆动,从而准确使吊具定位,人工的作业方式耗时高而且容易引发安全事故,对于天车操作人员的经验也有着很高的要求,天车操作逐步向自动化发展,因此对于天车吊具位置和轨迹识别技术的研究是实现天车自动化的关键问题。
1 天车吊具识别实验台搭建
本实验选取的实际天车系统长a=10m,宽b=10m,高h=5m,在实际工作过程中需要的视场范围在2.0m×2.0m。利用实验室的三坐标平台搭建长a1=1m、宽b1=1m、高h1=2m的天车吊具运动实验台来模拟真实状态下的吊具运动。
搭建的天车吊具运动识别实验平台主要分为三部分:上位机电脑、PLC控制柜、加速度数据采集与分析系统和三坐标平台。其中上位机电脑与PLC控制柜通过通讯电缆相连,PLC控制伺服放大器给三坐标电机下达命令控制三坐标平台的运动,模拟真实状态下的天车吊具运动。上位机电脑与工业相机通过USB相连进行吊具目标物的图像采集,来获得天车吊具运动时刻的图像。由于天车实际工作环境较为复杂,从复杂的背景中提取目标物是非常困难的,而且天车的工作时间长,外界光线常常会影响天车吊具的识别,在实验室进行模拟实验时,在吊具模型上设置发光二极管,如图1所示。将发光二极管与吊具模型视为一个整体,使吊具模型在复杂的背景中更容易进行图像采集和目标物的运动识别[2]。搭建成功的天车吊具运动识别实验台如图2所示。

图1 二极管图

图2 实验台
2 天车吊具运动图像采集
实时图像采集的速度的快慢、图像采集的质量的高低都直接影响着后续进行吊具目标物图像处理的效果[3]。实验采取的传感器类型为CCD图像传感器,CCD传感器具有功耗低、编程简单等优势,可以实现采集图像的精准控制,对于吊具图像的采集更加适用[4]。
采用选择好的LED光源,工业相机传感器为CCD传感器对吊具图像进行采集。采集到的不添加发光二级管吊具图像如图3所示。

图3 不添加发光二极管的吊具图
对添加发光二极管的吊具进行采集,采集后的吊具目标物图像如图4示。
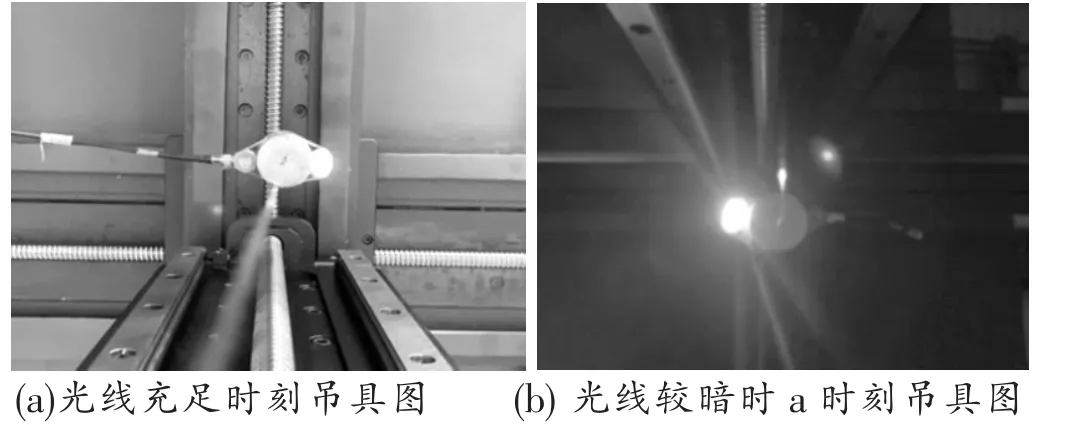
图4 采集到的添加发光二极管吊具图
3 RGB颜色分割法处理吊具图像
彩色图像的分割原理和灰度图像类似,主要指根据色彩和空间特征的不同进行分割[5],彩色图像和灰度图像相比图像的信息量更大。图像中最重要的信息不仅是图像中目标物的边界信息,其色彩同样即为重要,一幅图像的色彩可以很好的反应实际的目标物模型,体现图像中目标物的特征。但是需要根据实验时的实际情况选择合适的颜色空间,RGB模型由红(red)、绿(green)、蓝(blue)三基色组成,RGB颜色模型是最为常见的颜色空间模型[6],坐标系表示其模型如图5所示。

图5 笛卡尔坐标系下的RGB模型图
R、G、B分别用三个不同方向的坐标轴表示,坐标原点(0,0,0)表示的是黑色,(0,0,1)、(1,0,0)和(0,1,0)分别表示蓝、红、绿色,(1,1,1)为白色。F表示任意一种颜色,用r、g、b表示的红绿蓝构成的公示表示为:

对于彩色图像而言,将其转换为灰度图像后,经常会产生色彩的偏差,有些彩色信息不是黑色在转换后却接近黑色,这对于图像目标物信息的识别造成了极大的干扰。在利用灰度图像进行阈值分割时会伴随着误差,当误差较小时,对于图像目标物的识别可能没有影响,但是对于本实验中将彩色图像转化为灰度图像的传统阈值分割的方法分割的效果并不佳。因此对采集到的吊具彩色图像直接进行彩色图像阈值分割,不需要转化为灰度图像,这样就降低了因转换造成的误差干扰。
对不添加绿色发光二极管的吊具目标物进行RGB颜色分割,分割后的图像如图6所示。

图6 不添加发光二极管吊具分割图
对于不添加绿色发光二极管的分割图像中可以看出,RGB颜色分割的方法不能识别处吊具目标物运动的位置。同样对添加绿色发光二极管的吊具图像进行分割,结果如图7、图8所示。

图7 对光线充足时时刻分割图

图8 对光线较暗时时刻分割图
4 结论
从上图中看出虽然RGB颜色分割的方法很难将不添加绿色发光二极管的吊具目标物从复杂的背景中分割出来,但是基于RGB彩色图像分割的方法处理后的添加绿色发光二极管的吊具运动图像,在光线较好和光线较暗时吊具目标物和背景都被清晰的分割了。处理后的吊具位置可以被准确的定位,其原因是吊具目标物和背景的特征没有显著的差异性所导致的,对于特征无显著差异的吊具和背景而言,添加发光二极管的方法对于复杂背景下的吊具目标物运动识别具有很好的效果。
