双臂搬运机器人结构设计与动态仿真分析
2021-03-11曹东江
曹东江, 王 强, 王 宁
(航空工业庆安集团有限公司,陕西 西安 710077)
随着科学技术的进步,机器人在生产制造领域得到了越来越广泛的应用,但目前应用大多是单臂机器人独自工作的情形。对于许多比较复杂、特殊的作业任务如搬运重物、装配和维修复杂工件等,单臂机器人仍代替不了技术工人来完成操作任务[1]。为了适应这些高难度作业,一些学者开始着手研究通过两个或多个操作臂协调操作来实现单臂机器人无法完成的任务[2],这样就产生了双臂机器人。双臂机器人模仿人类双臂协作的生物学机理,具有灵活性高、适应能力强、性价比高和可提高工作空间的利用率等优点,可在一些特殊复杂多变的作业环境中完成作业任务[3],对双臂作业机器人的研究逐渐成为下一代机器人研究的热点之一[4-5]。
目前世界各国已研发出多种双臂作业机器人[4],如瑞士ABB 公司开发的Yumi机器人双臂各具有7个自由度,该机器人手臂末端装备了柔性手爪,通过传感器可以实现空间六维感知[6-7];日本东北大学研制的空间双臂机器人可捕获空间漂浮物体;美国Rethink公司研制的Baxter,其双臂各有7个自由度,单臂负载2.25 kg,可实现高精度运动[8]。
国内北京理工大学研发名为“汇童”的仿人双臂机器人,配备传感系统,突破了灵巧动作控制和自主协调反应等关键技术[9-10];首钢莫托曼公司研制成功了双机器人弧焊系统;哈尔滨工业大学等在空间双臂机器人的设计和参数优化问题等方面进行了有益的研究工作[11]。
当前对双臂机器人设计多集中在灵巧机械手,智能化高,可从事复杂作业,但是承载量小,结构和控制复杂。结合实际需求,设计一种双六自由度搬运机械臂,采用双臂协作,可有效减轻单个臂上所承受的力矩,增加机器人的承载能力,在末端夹手平移运动的情况下工作,比两个单臂机器人相应动作的控制简单[12],且稳定性好,在双臂姿态相对变化的情况下,通过两臂的较好配合能够调整搬运对象的姿态,适用于棒料搬运、安装、定位等操作。将该双臂搬运机器人固定于移动载具上,可以增加其活动空间和灵活性,通过配以视觉定位和测量系统,双臂搬运机器人可应用于无人机小型导弹和炸弹(重量≤60 kg)的翼下挂装或者复合挂架的挂装,双臂机器人可以将各种弹药送往悬挂装置,进行准确定位,实现自主弹药挂装,缩短无人机返程后二次起飞的准备时间,节省人力,提高效率。
首先对双臂搬运机器人总体结构进行设计并对其驱动方式、主要回转关节结构进行分析,对机器人末端执行器功能结构进行分析,建立机器人整体虚拟模型;然后给定机器人D-H参数,以LMS为仿真平台,对机器人进行动态仿真,通过分析机器人运动及关节曲线,验证了双臂机器人结构设计的合理性。
1 双臂搬运机器人结构设计
相比于单臂机器人,双臂机器人作为一个完整的机器人系统,双臂之间存在着依赖关系[12]。双臂之间通过一个共同的联接形成物理耦合,它们分享使用传感数据,通过双臂之间的协调控制、协调运动[13],完成一些复杂的工作任务。
1.1 双臂搬运机器人总体结构设计
双臂搬运机器人采用关节型双臂结构,其三维结构如图1所示,是由10个转动环节组成的双六自由度搬运机械臂。其机械臂结构主要组成为:底座和腰部回转部分、肩部回转、大臂Ⅰ、大臂Ⅱ、大臂Ⅱ回转关节、肘部、肘部回转关节、肘部摆动关节、小臂、腕部、腕部回转关节和夹手等部分。其中,机械臂部分由10个驱动转动环节组成,腰部回转和肩部回转为2个共用转动关节,双臂各有4个回转关节,组成双六自由度机械臂。两个夹手部分采用梯形槽设计,各有一个自由转动环节OH1和OH2,并无电机驱动,是额外的两个随动旋转。双臂搬运机器人构型示意图如图2所示。
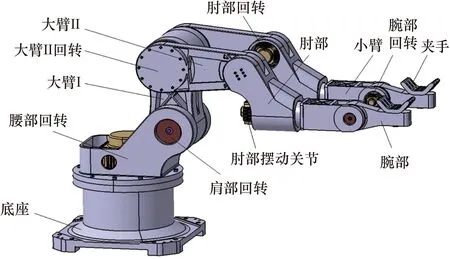
图1 双臂搬运机器人整体结构模型
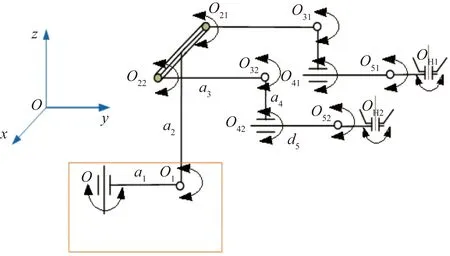
图2 双臂搬运机器人构型示意图
双臂机器人位置定位由其前4个转动环节(O,O1,O2x,O3x,x=1,2)确定,虽然其位置定位上关节数存在冗余,但是提高了双臂定位的伸缩灵活性;而在姿态定位上,作为机器人单臂,采用2个姿态自由度(O4x,O5x,x=1,2),这种结构比传统的三自由度定姿结构简单,简化了机器人腕部结构,由于可以控制双臂协调互动,机器人仍然可以在一定程度上调整末端搬运对象的空间姿态,以适应工作任务要求。
1.2 双臂搬运机器人的驱动方式的确定
由于双臂搬运机器人在工作时往往需要输出较大的扭矩和较平稳的运动,结合电动机具有承受的扭矩小、输出速度大的特点,双臂机器人的各个关节驱动系统采用“伺服电动机+RV减速器”的驱动形式。
1.3 双臂搬运机器人关节结构设计
(1) 腰部回转关节结构。
基座将双臂搬运机器人与地面或移动载具进行固定,承载了机器人全部的重量,也是连接腰部的机构,双臂搬运机器人的腰部运动设计为回转形式,电机安装在基座上方,通过RV减速器直接和腰部回转壳体连接,电机输出轴直接与RV减速器相连,带动整个腰部在基座上旋转工作,如图3所示。
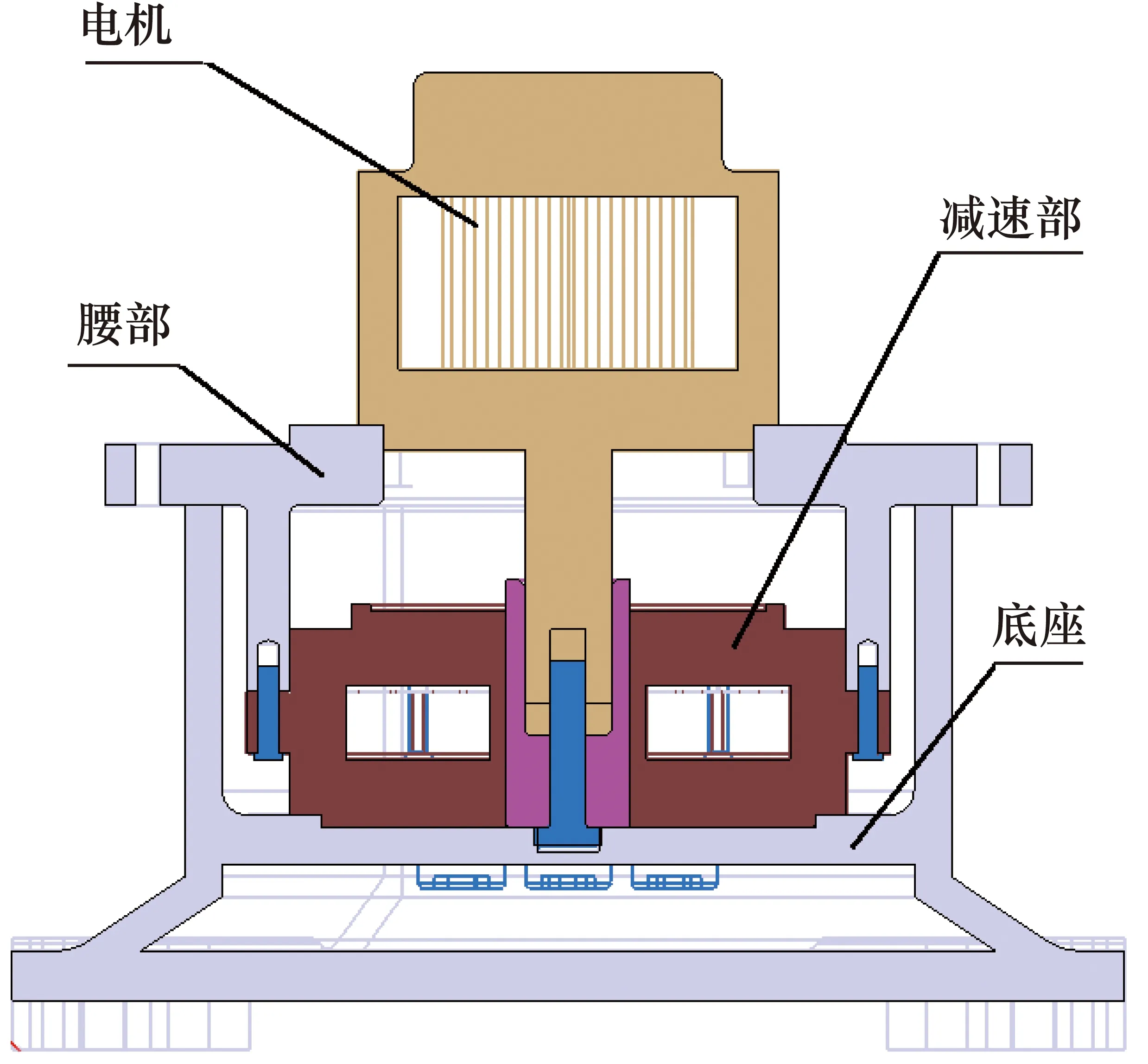
图3 机器人腰部回转关节结构
(2) 双臂搬运机器人臂部驱动回转结构。
双臂机器人臂部也称臂部操作机,是机器人执行机构中重要的部件,它的作用是支撑肘部、腕部和手部,并将末端执行器运动到指定的位置上。双臂机器人采用关节型侧置式(摆式)臂部结构确定机器人手部的位置和姿态,该结构主要优点是关节上、下臂的活动范围大,使机器人的工作空间几乎能成为一个球体[14],其结构如图4所示。
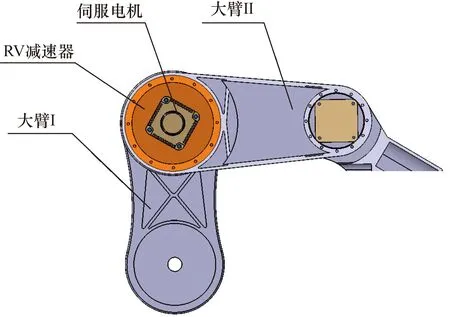
图4 机器人臂部回转结构图
双臂机器人臂部为对称式双臂结构,大臂Ⅱ回转处的电机和减速器安装在大臂Ⅱ关节腔内,电机输出轴直接与RV减速器相连,驱动RV减速器带动大臂Ⅱ及其之后的小臂和腕部运动,其结构如图5所示。
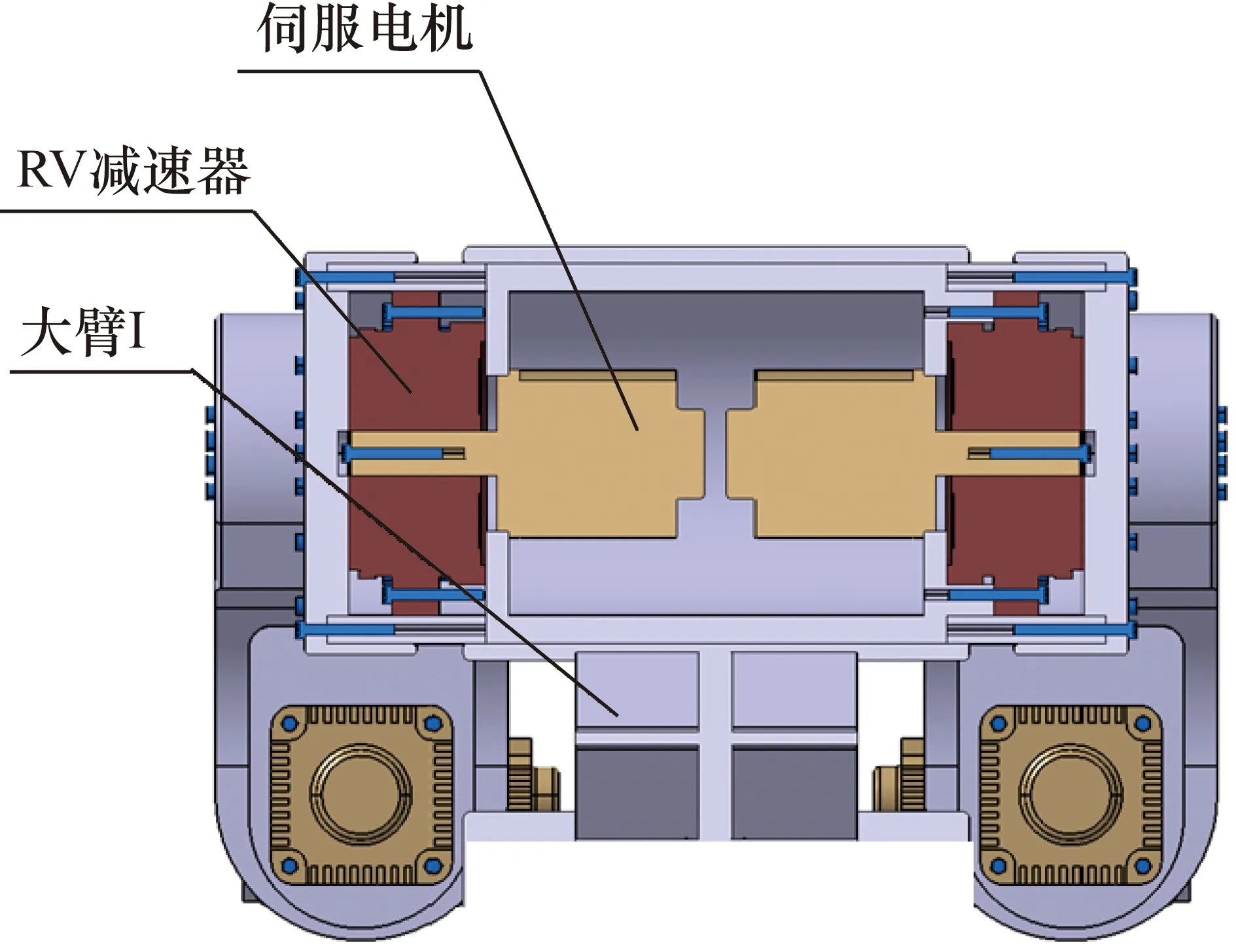
图5 机器人双臂内部传动结构图
双臂搬运机器人其余肩部、肘部、腕部等回转关节结构和所述臂部驱动结构类似,都是伺服电机驱动RV减速器间接带动机械臂旋转,这里不再赘述。
(3) 双臂机器人末端执行器。
末端执行器是双臂搬运机器人直接进行工作的部分,也叫末端夹持器、夹手。可因搬运对象不同而设计不同的末端夹持器,这里以工作对象是长圆棒状为例,机械臂末端的夹持器采用类似梯形槽的设计,可以方便地对棒料进行卡位夹持,完成搬运工作。梯形槽内侧设计安装防滑材料,可以防止棒料在有小角度倾斜时出现滑动,通过转轴将其安装连接在机器人指端,形成回转型夹手,该设计可以避免在搬运类似棒料的任务中因两个夹手凹槽方位不一致而引起干涉,并无电机驱动结构,是额外的两个随动旋转,其设计结构如图6所示。搬运棒料操作模型如图7所示,在实际应用中,在这两个旋转副中加入扭簧,使夹手接触工件时随工件转动,脱离工件时能够迅速回中。

图6 双臂搬运机器人末端执行器结构图
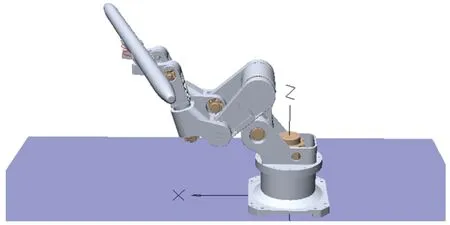
图7 双臂搬运机器人搬运棒料操作模型
2 双臂机器人动态仿真分析
将双臂搬运机器人三维模型各个部件导入到LMS Virtual.Lab Motion 3D仿真平台中,在各个部件的关节连接处建立坐标系,创建关节旋转副,并添加约束与驱动[15]。根据前述双臂机器人结构,共需要12个旋转副参与运转,其中,前10个旋转运动副由电机和减速器直接驱动控制,用于实现末端执行器的位姿变化,后2个旋转副用于实现工件沿竖直中心轴方向的旋转。其建模结果如图8所示。
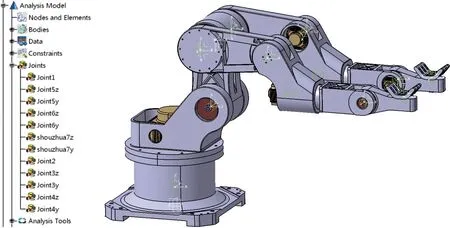
图8 双臂搬运机器人在LMS.motion中模型
双臂搬运机器人D-H参数如表1所示,机器人D-H坐标系如图9所示,为使图面简洁,对称的双臂只画出了右臂坐标系。
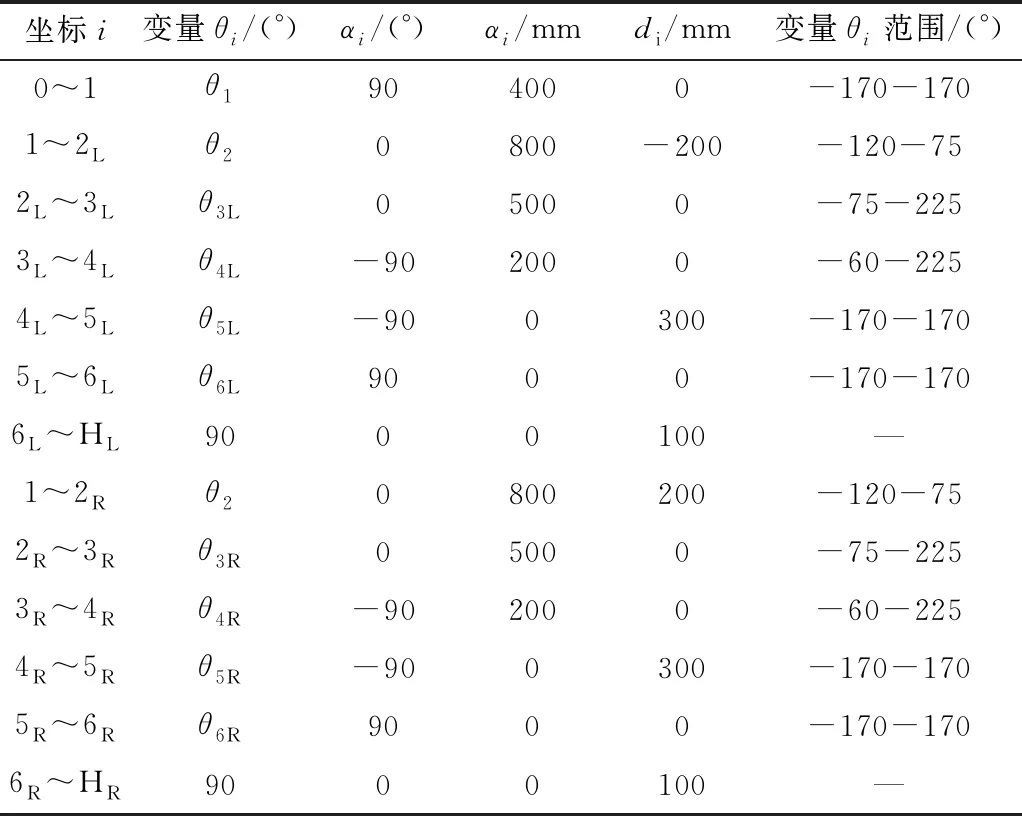
表1 双臂搬运机器人D-H参数表
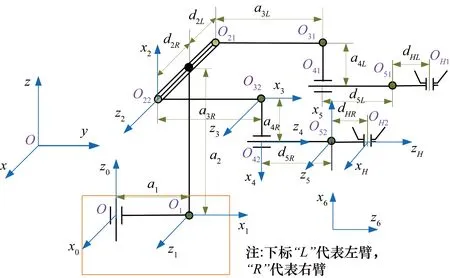
图9 双臂搬运机器人D-H坐标系
主要设计性能参数如下。
① 最大工作半径:1800 mm;
② 最大举升高度:1500 mm;
③ 末端有效负载:≤60 kg;
④ 机械臂重量:≤600 kg。
为了显示双臂机器人运动姿态,设计机器人动态工作过程,使机器人经历6个关键位姿点O、A、B、C、D、E,整个工作过程是机器人“托举棒料—中间搬运移动—在目标位置定位安装(经历关键点需要调整到符合该点位姿)”几个简单动作的任务流程。 确定好关键点末端姿态之后,通过双臂机器人逆运动学可以确定机器人各个关节轴的角度位置,综合利用关节空间轨迹规划和直角坐标轨迹规划方法进行任务轨迹规划[16],整个工作任务行程时间为40 s,通过把Matlab中的运算结果数据导入LMS中,驱动机器人运动,其末端轨迹曲线如图10所示,机器人各关键点在LMS中的姿态如图11所示。

图10 双臂机器人工作任务末端轨迹图

图11 双臂机器人在O、A、B、C、D、E各关键点姿态
根据LMS仿真处理数据,可以得出运动规划中关节1和关节2角位移曲线(如图12所示)、机器人左臂4个关节角位移曲线(如图13所示)、机器人右臂4个关节角位移曲线(如图14所示)。由数据曲线可以看出,各个关节运动平滑,运行无卡滞,通过设定不同位姿的关键点,检测双臂能够协调运动,有效控制负载的姿态,使双臂搬运机器人能够适应搬运棒料及棒状弹药等更多的工作情况。

图12 关节1、关节2角位移曲线
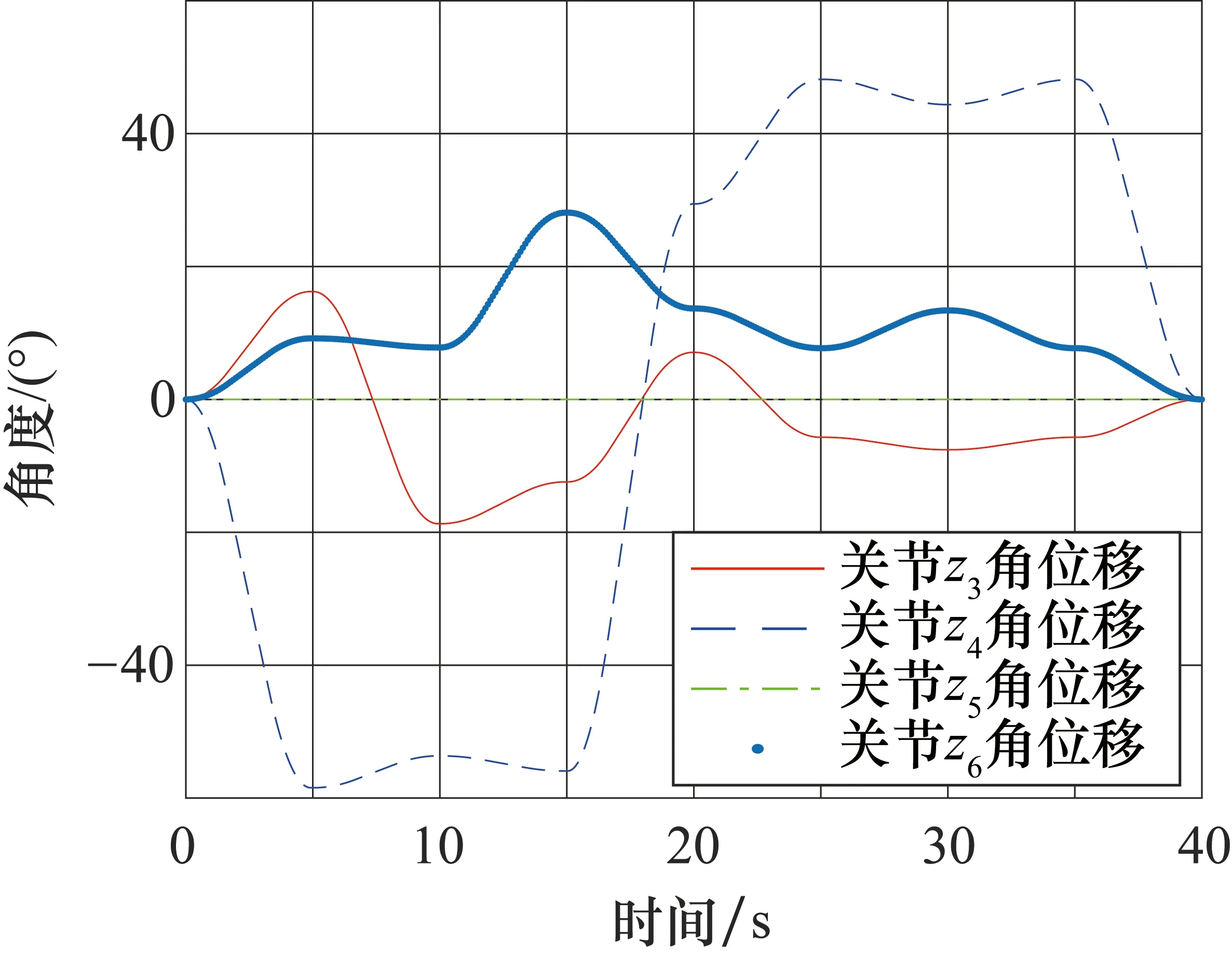
图13 左臂4个关节角位移曲线

图14 右臂4个关节角位移曲线
3 结束语
设计了一种双臂搬运机器人,采用双臂协作,可增加机器人的承载能力和操作灵活性,适用于棒料搬运、安装、定位等操作。通过回转梯型槽夹持器的设计,避免了在搬运棒料的过程中两个夹手凹槽方位不一致而引发干涉的情况,整体结构灵活紧凑,能满足机器人在各个方向上接近和搬运目标物的要求。
对双臂搬运机器人进行动态仿真分析,通过设置运动轨迹上各种姿态的关键点,验证了双臂机器人在结构上可以适应工作任务过程中各种姿态的调整,并且各个关节运动平滑、无卡滞,反映了机器人结构设计的合理性和操作的灵活性。设计结构和其动态分析成果对后期的双臂机器人动力学分析和控制技术研究具有一定的参考价值。