重型拖拉机CAN通信网络设计
2021-03-08阚辉玉李军伟李德芳高松
阚辉玉,李军伟,李德芳,高松
(1.山东理工大学 交通与车辆工程学院,山东 淄博 255049;2.雷沃重工股份有限公司 雷沃阿波斯技术研究院,山东 潍坊 261210)
拖拉机作为农业生产必不可少的工具,是田间作业的主要动力,在发展现代化农业的道路上起着重要的作用[1-2]。国外对于重型拖拉机的研究起步较早,国外农机巨头如美国的John Deere公司、CNH公司等,大多具备生产重型拖拉机的能力。与国外相比,我国对重型拖拉机的研究起步相对较晚,国内仅有少数大型农机厂商具备重型拖拉机的研制能力,如一拖集团、雷沃阿波斯集团等。随着电子技术、智能控制等技术在重型拖拉机上的应用,重型拖拉机逐渐配备有动力换挡、动力转向、四轮驱动、差速锁和PTO(power take off)恒定输出等功能[3]。为提高拖拉机的整机控制性能,就需要建立能够实现各个控制单元之间数据共享的通信网络。因此,研究现代拖拉机的整机通信网络对提高我国拖拉机的技术水平具有重大意义。
CAN(controller area network)总线是为了解决汽车ECU之间众多的数据交换问题而产生的[4-6]。由于CAN总线具有较强的抗电磁干扰性、较高的通信速率,随着国内大型和重型拖拉机的发展,CAN总线技术也逐渐应用到拖拉机的整机通信网络中[7]。王任重等[8]以发动机节点、灯光节点和仪表节点建立了CAN通信网络并测试了负载率,但所涉及的控制单元尚不能覆盖重型拖拉机的需求;闫祥海等[9]以自动变速器(AMT)控制器为例,主要建立了AMT与ECU的CAN通信网络,对于ECU与其他节点的通信研究较少[9];明鑫朗[10]建立了基于CAN总线的智能电动拖拉机控制系统架构,该系统架构包含五个节点,但没有涉及到动力换挡及PTO等功能;王文伟[11]提出了一种基于CAN总线的拖拉机虚拟仪表系统,该系统结合了CAN总线技术和虚拟仪器技术。
尽管我国对拖拉机整机通信网络的设计已经有了一定的研究基础,但仍缺少可以覆盖重型拖拉机多个控制单元的整机通信网络。本文根据拖拉机整机控制器、发动机控制器、变速箱控制器、电控提升控制器、精准作业控制器以及仪表等各组成部件,分别设计了拖拉机的单CAN网络和双CAN网络拓扑结构,并制定了基于SAE J1939和ISO 11783的CAN通信网络协议;通过CANoe软件分别搭建了单CAN网络和双CAN网络仿真平台以实现对拖拉机CAN通信网络的性能分析;最后利用实车测试来验证所设计的CAN通信网络的可靠性和可行性。
1 拖拉机CAN网络拓扑设计
对于重型拖拉机来说,整机控制器(VCU)、发动机控制器(ECU)、变速箱控制器(TCM)、电控提升控制器(HCM)以及仪表控制器(ICM)是构成拖拉机整机控制系统最基本的部件。此外,在以上五个节点的基础上增加了精准作业控制器(PCM)以匹配农机具进行精准作业。由于重型拖拉机控制单元较多,因此,在设计整机CAN总线通信网络的拓扑结构时,分别建立了单CAN网络和双CAN网络。图1表示拖拉机的单CAN网络拓扑结构,图2表示拖拉机的双CAN网络拓扑结构。
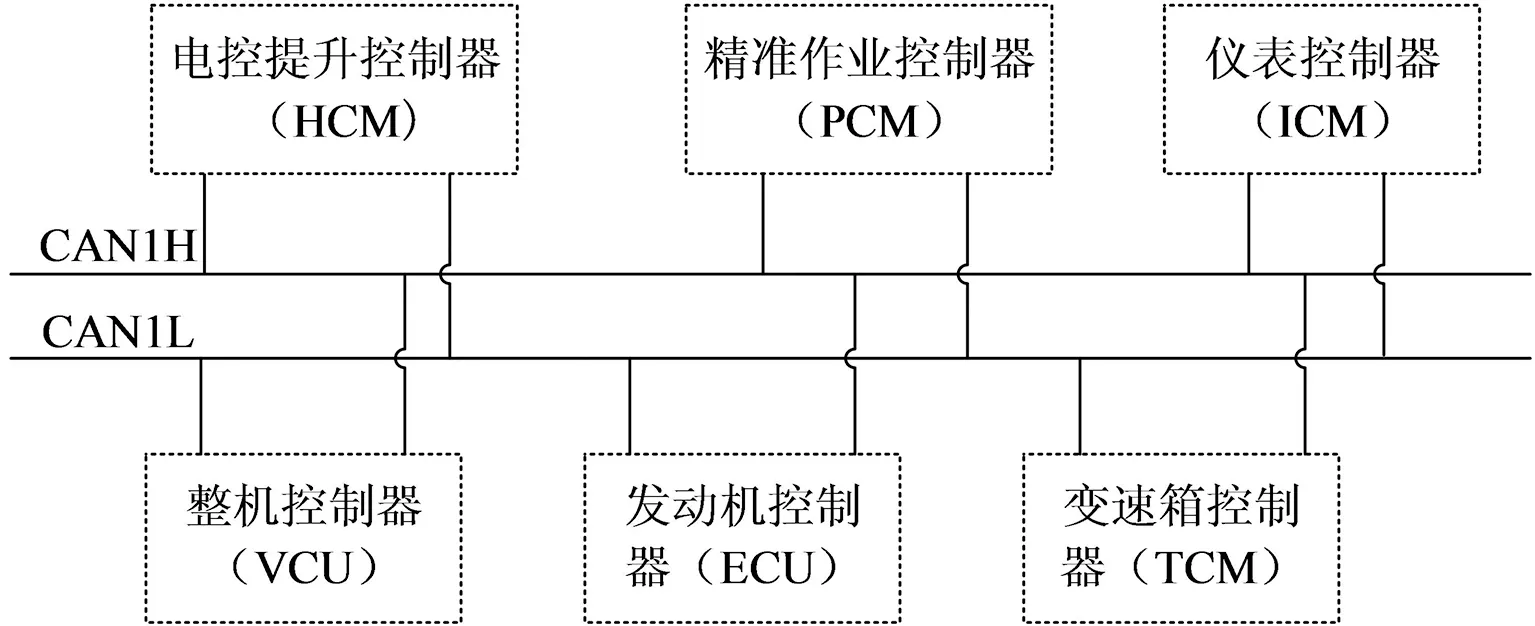
图1 拖拉机的单CAN网络拓扑结构Fig.1 Single CAN network topology for tractors

图2 拖拉机的双CAN网络拓扑结构Fig.2 Dual CAN network topology for tractors
由图1可知,拖拉机单CAN网络拓扑结构由整机控制器,发动机控制器等六个节点组成。作为拖拉机正常运行的核心,整机控制器在通过与发动机、变速箱等控制器进行信息交互以获取各部件运行状态的同时,还会识别驾驶员的驾驶意图,从而控制拖拉机安全行驶和作业;发动机控制器一方面根据整机控制器的控制信号控制发动机的正常工作,另一方面会将发动机的工作状态信息发送到整机控制器等其他控制器,从而使各控制器根据发动机运行状态合理决策;变速箱控制器主要用来控制拖拉机的挡位状态,实现拖拉机的动力换挡等功能;电控提升控制器主要用来接收来自整机控制器的控制信息,从而控制智能农机具按驾驶员意图进行深耕作业;仪表控制器主要用来实时向驾驶员显示拖拉机的运行状态信息,它通过接收其他控制器的CAN报文来控制仪表的显示内容;精准作业控制器主要用来接收表示拖拉机运行状态的CAN报文,从而控制智能农机具根据拖拉机运行状态来进行精准作业。由图2可知,双CAN网络中的CAN1网络主要由整机控制器、电控提升控制器、精准作业控制器组成,CAN2网络主要由整机控制器、发动机控制器、变速箱控制器和仪表控制器组成。在双CAN网络中,整机控制器是CAN1和CAN2网络连接的桥梁,起到网关的作用,一方面整机控制器发送拖拉机状态信息如车速、发动机转速等供电控提升控制器决策使用,另一方面,电控提升控制器和精准作业控制器的运行状态信息会通过整机控制器来上传给仪表控制器,以便驾驶员了解各总成工作情况。
2 拖拉机CAN通信网络协议制定
CAN通信网络协议是拖拉机各部件控制器数据交换、控制策略制定和拖拉机正常运行的基础。SAE J1939和ISO 11783相比,都是基于CAN2.0B协议的扩展帧(29位标识符)制定的数据通信网络标准,都是采用协议数据单元(protocol data unit,PDU)来规范信息帧格式,两者不同之处在于SAE J1939的应用侧重于商用车,而ISO 11783的应用侧重于农林拖拉机和农业机械[12]。因此,文中以ISO 11783标准协议为例对协议数据单元PDU进行介绍。如图3所示,协议数据单元PDU由优先级(P)、保留位(R)、数据页(DP)、PDU格式(PF)、特定PDU(PS)、源地址(SA)、数据场(DATA)组成,其中R、DP、PF、PS构成了标志PDU内容和种类的参数组编号(paramater group numbers,PGN)。PDU格式可分为PDU1和PDU2,当PF值小于240时,为PDU1格式,此时消息会发送到与目标地址PS相同的特定地址中;当PF值在240~255之间时,PS为组扩展。

图3 ISO 11783协议数据单元Fig.3 Protocol data unit of ISO 11783
根据拖拉机各部件控制器的功能以及报文的优先级,本文基于SAE J1939标准协议和ISO 11783标准协议为不同报文分配特有的参数组编号和优先级,制定了拖拉机CAN通信网络协议,见表1。以PGN为00FE4316的报文来介绍CAN通信网络协议的具体制定过程。ISO 11783规定PGN为00FE4316的报文更新周期为100 ms,默认优先级为3,字节长度为8 B。其中,字节1、2表示后动力输出轴转速,字节3、4表示后动力输出轴转速设定值。字节5的第7、8位表示输出轴的接合状态,00表示动力输出轴分离,01表示动力输出轴接合;第5、6位表示后动力输出模式,00表示输出轴模式为540 r/min,01表示输出轴模式为1 000 r/min;第3、4位表示后动力输出经济模式,00表示未启用动力输出经济模式,01表示已启用动力输出经济模式。其余未定义位进行了保留。
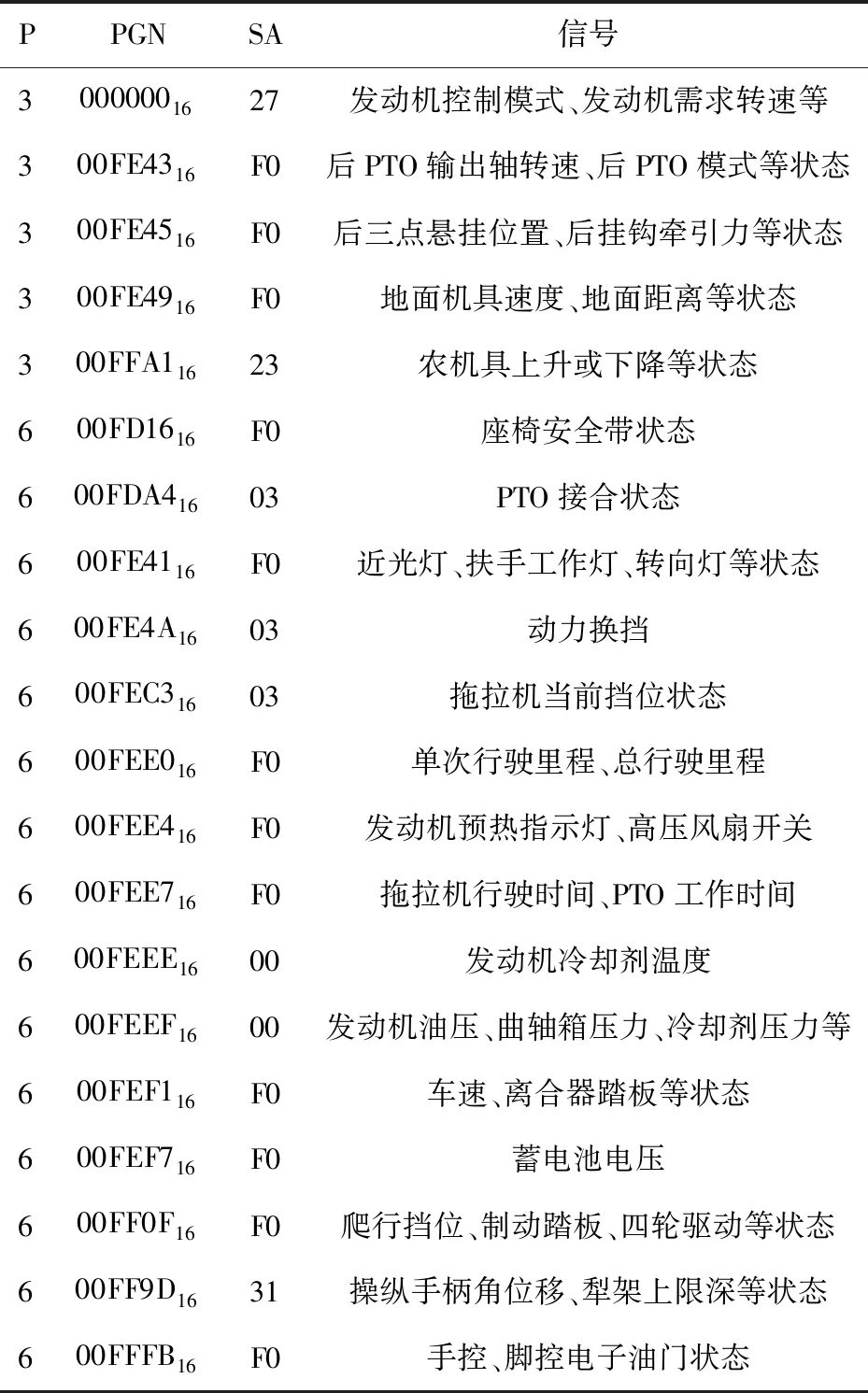
表1 拖拉机CAN通信协议Tab.1 CAN communication protocol of tractor
3 拖拉机CAN网络仿真
CANoe是德国Vector公司研发的用于CAN总线分析的软件,支持从CAN总线系统分析到系统实现的整个系统开发过程[13-14]。为了验证本文设计的单CAN网络和双CAN网络拓扑结构性能,使用CANoe软件对拖拉机CAN网络进行仿真,以检测整机CAN总线通信网络的可行性[15]。
3.1 CAN网络仿真模型
根据定义的报文建立CAN通信数据库后,为通过仿真来预估在设定波特率情况下的总线负载和延迟,需要在CANoe的Simulation Setup窗口中分别构建与图1和图2相对应的单CAN网络和双CAN网络拓扑的仿真模型,以实现拖拉机内部各节点所对应报文的接收和发送。
3.2 CAN网络负载率
CAN总线的负载率是指总线上每秒实际传输的数据位数与理论所能传输的最大数据位数之比,其大小与总线上的节点数量、总线的波特率、每帧报文的帧类以及数据场长度等有关。在本文设计的CAN网络中,单CAN网络具有6个节点,双CAN网络中的CAN1和CAN2网络分别具有3个节点和4个节点,其中VCU还具有网关的作用。CAN总线负载率计算公式为
(1)
式中:n为在1 s内传输的CAN报文总数量;Si为第i个报文占用的数据位数;Brate为CAN总线的波特率。
在CAN网络中,总线负载率过高会增加报文传输过程中发生碰撞的概率,增加发生总线仲裁的可能性,降低电控单元之间的通信效率;反之,总线负载率过低又会浪费总线资源,造成网络带宽的浪费。一般来说,CAN总线的负载率处于20 %~30 %可以保证控制器高效的运行,充分利用总线带宽,保证总线通信功能的可靠性[16]。CAN总线的负载率可以通过CANoe软件的仿真功能进行计算和优化,表2为拖拉机CAN网络负载率仿真结果。由表2可知,单CAN网络结构下,波特率为250 kb/s时,负载率非常高,达到了94 %;波特率为500 kb/s时,负载率也比较高,达到了47 %。双CAN网络结构下,波特率为250 kb/s时,CAN1总线负载率为41.59 %,CAN2的为41.52 %,负载率较高;波特率为500 kb/s时,CAN1通道总线负载率为20.80 %,CAN2的为20.76 %。由仿真结果可知,当波特率由250 kb/s提高到500 kb/s时,随着信号传输速率的增加,CAN总线负载率明显降低。因此,拖拉机CAN总线通信设计最好选择波特率为500 kb/s时的双CAN网络拓扑结构。
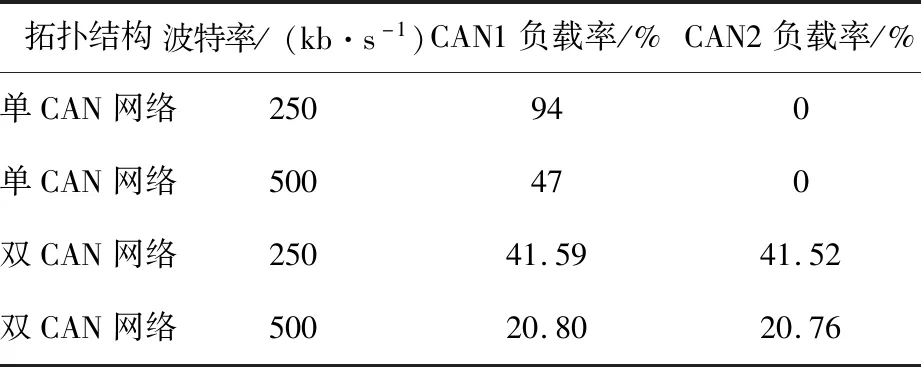
表2 拖拉机CAN网络负载率仿真结果Tab.2 Simulation results of tractor CAN network load rate
3.3 CAN网络信号仿真
为了验证拖拉机CAN总线网络设计的合理性和可行性,需要对网络所传递的信号进行测试分析。在进行系统设计时,系统中的状态变量(如后PTO接合状态等)用0和1表示;系统中的模拟量(如发动机转速等)由其对应的数字量表示。图4为仿真过程中座椅安全带状态曲线、后PTO接合状态曲线、四驱状态曲线、车速曲线和发动机转速曲线。由图4可知,当车速低于20 km/h时,拖拉机进入四驱状态;当发动机在26.5 s进入怠速状态后,拖拉机车速也明显下降。以上分析可知,整机CAN总线通信网络具有可行性。

图4 CAN网络信号Fig.4 CAN network signal
4 实验测试
在经过仿真测试后,整机CAN总线通信网络的基本功能已经实现,接下来需要对整机功能进行实验测试进一步验证整机CAN总线网络的实际效果。实验测试所用车辆为雷沃P7000拖拉机,如图5所示。整机CAN总线通信网络的参数采用图2的双CAN网络,波特率为500 kb/s。
4.1 挡位识别测试
挡位识别测试是指在拖拉机挂入相应挡位时,整机控制器应能正确识别该挡位。图6(a)为发动机的挡位状态与时间的变化曲线,1表示前进挡,2表示空挡。
4.2 发动机起动测试
发动机起动测试是指拖拉机处于空挡状态下,发动机水温高于最低起动温度,离合器踏板踩下,发动机转速低于200 r/min,打开点火开关时,起动继电器闭合,启动机带动发动机转动,直到发动机起动成功。图6(b)为离合器踏板状态与时间的变化曲线,1表示离合器处于闭合状态;图6(c)为点火开关与时间的变化曲线,由于点火开关是一个自复位开关,因此松开钥匙开关后点火开关将复位到关闭状态。图6(d)为发动机转速与时间的变化曲线,当起动条件满足后,启动机将带动发动机转动,直到发动机起动成功。由图6(d)知,发动机转速在刚起动时波动较大,但经过一段时间发动机转速逐渐稳定在850 r/min左右。

图5 拖拉机测试实车Fig.5 Tractor for real vehicle test

(a)挡位状态
4.3 油门踏板开度测试
油门踏板开度测试是指拖拉机处于正常工作状态下,踩下脚油门踏板后,观察电子油门输出信号变化和发动机的响应情况。图7为油门踏板开度测试曲线图。由图7(a)、图7(b)和图7(c)可知,脚油门踏板1电压的变化和踏板2电压的变化满足2倍的比例关系。当油门踏板开度为0 %时,脚油门踏板1电压和踏板2电压分别为0.75 V和0.375 V;当油门踏板开度为94 %时,脚油门踏板1电压和踏板2电压原始值分别为3.65 V和1.83 V。由图7(c)和图7(d)可知,在27 s左右和84 s左右时,随着油门踏板开度的增加,发动机转速有明显的提高;在18 s左右和139 s左右,随着踏板开度的减小,发动机转速有明显的下降。
4.4 四轮驱动测试
四轮驱动测试是指拖拉机处于正常工作状态下,按下四轮驱动翘板开关后,拖拉机前后轮都具备驱动功能;当再次按下四轮驱动翘板开关后,拖拉机仅有后轮具有驱动功能,前轮驱动功能应失效。图8(a)为四轮驱动翘板开关与时间的变化曲线,由于该开关是自复位式,因此当松开翘板开关时会自动复位;图8(b)为四轮驱动指示灯状态与时间的变化曲线,当满足四轮驱动模式的条件后,该指示灯将点亮,方便驾驶员了解拖拉机当前的驱动状态。

(a)踏板1电压曲线图

(a)四轮驱动翘板开关状态
4.5 报文传输延迟测试
报文传输延迟的测试是指拖动机正常工作一段时间后,观测各电控单元之间是否按照规定的标识符和传输时间来进行通信。通过对拖拉机运行过程中所采集的报文进行处理和分析,发现各电控单元可以按照协议所规定的标识符和传输时间进行通信,不存在丢帧的情况。由于用于拖拉机通信的报文比较多,文中以PGN为00FE4316的CAN报文为例进行分析。图9是PGN为00FE4316的CAN报文传输延迟时间曲线图。在第2节中,可以知道PGN为00FE4316的CAN报文更新周期是100 ms,由图9可以看出CAN报文最大的传输延迟时间为1.06 ms,这远远小于更新周期100 ms,从而可知报文传输满足CAN通信实时性的要求[17]。
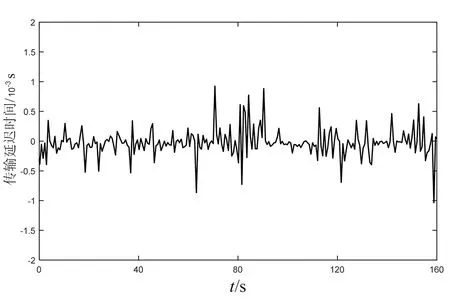
图9 报文传输延迟时间曲线图Fig.9 Curve of message transmission delay time
通过以上分别对挡位识别、发动机起动、油门踏板开度和四轮驱动的测试,实现了挡位识别、四轮驱动等功能,说明了所设计的波特率为500 kb/s的双CAN网络可以准确地采集和传输拖拉机各控制单元的信息;通过对报文传输延迟的测试,表明所设计的CAN网络可以满足通信实时性的要求,从而保证CAN通信的可靠性,使拖拉机按驾驶员意图安全作业。
5 结论
1)本文针对重型拖拉机构型的特点,设计开发了整机CAN总线通信系统。该通信网络包含了较为全面的重型拖拉机的电控单元。
2)在单CAN网络和双CAN网络拓扑结构的基础上,通过CANoe进行了整机CAN总线网络负载率的分析,依此确定了500 kb/s波特率的双CAN网络作为重型拖拉机的CAN总线网络拓扑结构。
3)对整机网络所传递的信号进行了完整性测试以确保重型拖拉机对双CAN网络性能的要求,实车测试了拖拉机的挡位识别、发动机起动、四轮驱动等功能。实际测试结果表明本文所设计开发的重型拖拉机CAN通信网络以及通信协议能够实现拖拉机的所有功能,满足重型拖拉机各个电控单元之间的实时通信和可靠性要求。
