改进永磁同步电机无速度传感器控制仿真
2021-03-07朱国庆
摘 要:在永磁同步电机(PMSM)精确控制的场合,需要安装位置传感器来得到转子的位置信息。为了降低成本,减小测速带来的干扰,提高系统可靠性,对PMSM采用无速度传感器控制。基于PMSM本身数学模型,设计了模型参考自适应转速辨识控制策略,实现了PMSM的速度估计。为了实现良好的抗干扰和跟踪性能,提出了模糊PI模型参考自适应速度估计方法。仿真结果表明,该方法可实现稳定的无速度传感器控制,实现转子位置的正确估计。
关键词:PMSM;矢量控制;磁场定向;无速度传感器:模型参考自适应;模糊控制
中图法分类号:TP391 文献标志码:A
引言
PMSM采用全封闭结构,损耗少,效率高,省去了齿轮箱,可靠性大大提高,极大节约了电机维护的人力和时间[1]。我国又是“稀土王国”,盛产永磁材料。因而作为机电能量的转换器件,PMSM脱颖而出在工业驱动领域,交通运输、油田和冶金系统得到广泛应用[2]。
随着PMSM 的应用范围不断扩大,对PMSM运行性能的要求越来越苛刻,对PMSM的控制提出了更高的要求。传统的PMSM控制大多采用基于转子磁场定向的矢量控制方法,这需要在PMSM转子上安装精度高的编码器来检测转子的位置,这增加了PMSM系统的不稳定性和系统成本。因此,无速度传感器控制方法被大量学者研究。常用的速度估计控制方法包括注入高频信号法,状态观测器法,滑模观测器法和神经网络等智能算法[3]。
本文基于PMSM的本身模型,建立了参考模型和可调模型,实现了无速度传感器控制。通过PI参数的在线调整,提出了模糊PI控制策略。对比分析了该控制方案的优越性。
1 在dq坐标系下的模型参考自适应控制
在dq同步旋轉坐标系下,表贴式三相PMSM采用转子磁链定向的矢量控制时的模型为:
作者简介:朱国庆(1972 -),男,安徽安庆人,大学本科,工程师,主要研究方向:控制技术、物流技术改造。
(1)
其中
(2)
式中:q、d下标表示交轴、直轴分量,i表示定子电流,u表示定子电压,Rs为定子电阻, 表示定子磁链, 为交轴、直轴电感, 为永磁体磁链,p为微分算子, 为转子电角速度。
将式(2)代入式(1)得电流方程的形式为:
(3)
首先定义如下:
(4)
对式(3)作出进一步的变形
(5)
式(5)可以表达为状态空间的形式,即
(6)
状态空间表达式式(6)中包含转子速度的信息,是转速辨识的基础。将三相PMSM本体作为参考模型,将式(6)作为可调模型,其中 为要辨识的参数[4、5]。
对式(6)用估计值表示,得到:
(7)
在dq同步旋转坐标系下,广义的电流误差定义为:
将式(6)和式(7)两式相减得到:
(8)
上式中
转速估计依据波波夫稳定理论,选择常规PI自适应控制器,可得估计速度式为:
(9)
其中 为常规PI调节器的比例与积分系数。
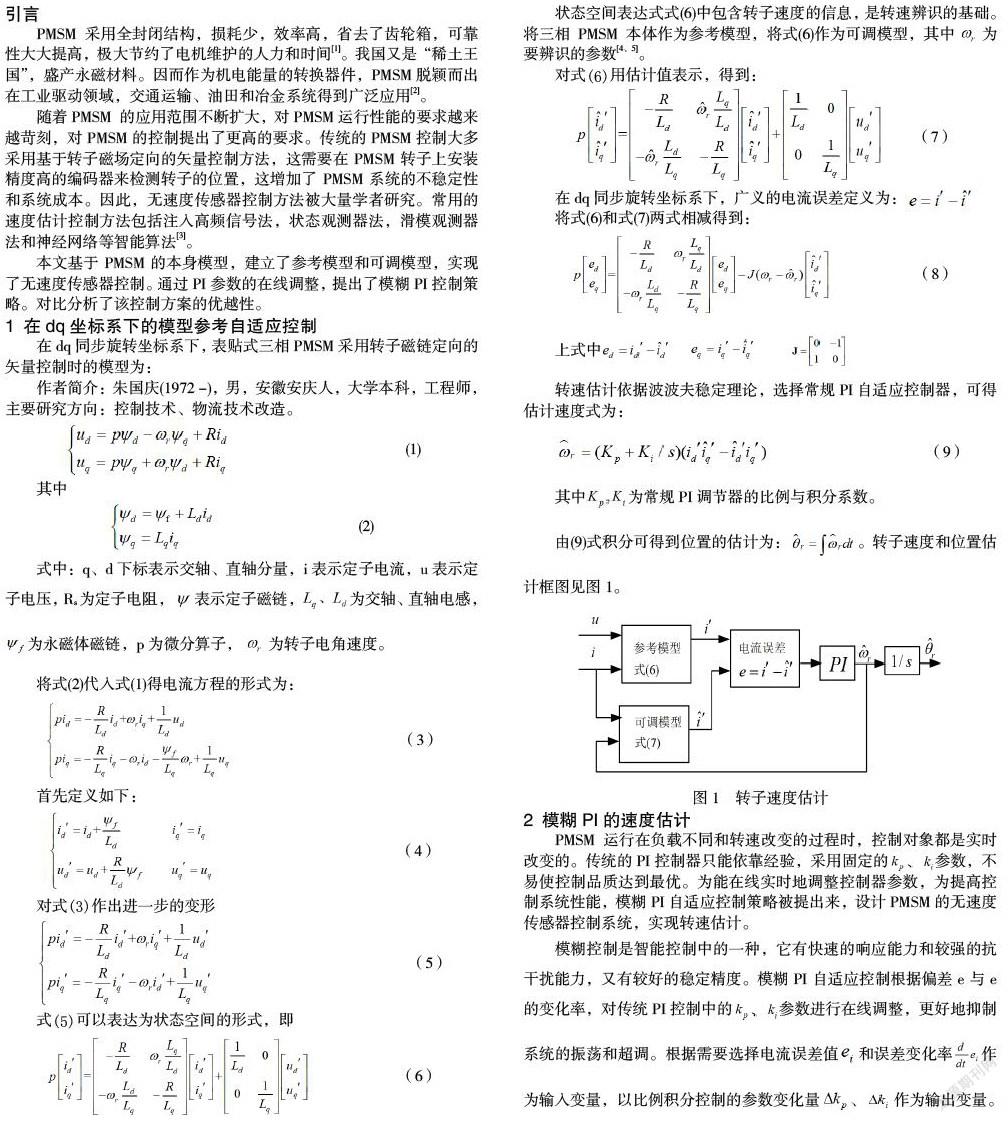
由(9)式积分可得到位置的估计为: 。转子速度和位置估计框图见图1。
2 模糊PI的速度估计
PMSM运行在负载不同和转速改变的过程时,控制对象都是实时改变的。传统的PI控制器只能依靠经验,采用固定的 参数,不易使控制品质达到最优。为能在线实时地调整控制器参数,为提高控制系统性能,模糊PI自适应控制策略被提出来,设计PMSM的无速度传感器控制系统,实现转速估计。
模糊控制是智能控制中的一种,它有快速的响应能力和较强的抗干扰能力,又有较好的稳定精度。模糊PI自适应控制根据偏差e与e的变化率,对传统PI控制中的 参数进行在线调整,更好地抑制系统的振荡和超调。根据需要选择电流误差值 和误差变化率 作为输入变量,以比例积分控制的参数变化量 、 作为输出变量。如图2所示为具体的结构控制图。
将输入和输出的变化范围定义为模糊集上的论域, 、 和 、 的论域都取为:
{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
设输入(用e、ec表示)和输出的隶属度函数曲线为三角形,语言变量的隶属度函数表示为{NB、NM、NS 、ZE、PS 、PM、PB},如图3所示。
利用加权平均法实现反模糊化,表达式为:
(10)
实际的输出控制量用x0与量化因子相乘得到。
3仿真实验
在Matlab/Simulink中,建立PMSM在d-q坐标系下的仿真模型进行转速估计。仿真对比了传统PI和模糊PI的系统控制性能,仿真中PMSM的参数为表3所示:
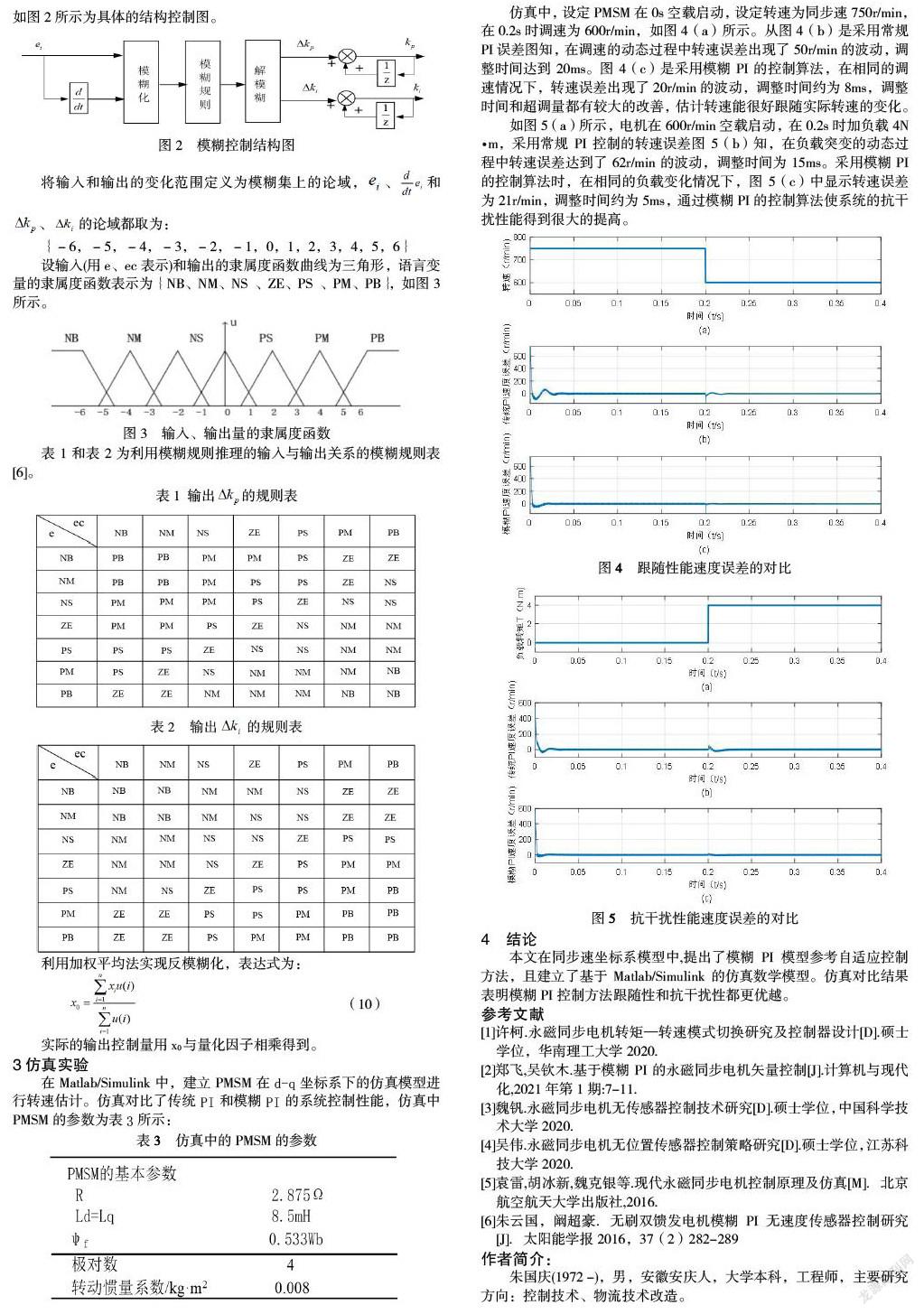
仿真中,设定PMSM在0s空载启动,设定转速为同步速750r/min,在0.2s时调速为600r/min,如图4(a)所示。从图4(b)是采用常规PI误差图知,在调速的动态过程中转速误差出现了50r/min的波动,调整时间达到20ms。图4(c)是采用模糊PI的控制算法,在相同的调速情况下,转速误差出现了20r/min的波动,调整时间约为8ms,调整时间和超调量都有较大的改善,估计转速能很好跟随实际转速的变化。
如图5(a)所示,电机在600r/min空载启动,在0.2s时加负载4N·m,采用常规PI控制的转速误差图5(b)知,在负载突变的动态过程中转速误差达到了62r/min的波动,调整时间为15ms。采用模糊PI的控制算法时,在相同的负载变化情况下,图5(c)中显示转速误差为21r/min,调整时间约为5ms,通过模糊PI的控制算法使系统的抗干扰性能得到很大的提高。
4 结论
本文在同步速坐标系模型中,提出了模糊PI模型参考自适应控制方法,且建立了基于Matlab/Simulink的仿真数学模型。仿真对比结果表明模糊PI控制方法跟随性和抗干扰性都更优越。
参考文献
[1]许柯.永磁同步电机转矩—转速模式切换研究及控制器设计[D].硕士学位,华南理工大学2020.
[2]郑飞,吴钦木.基于模糊PI的永磁同步电机矢量控制[J].计算机与现代化,2021年第1期:7-11.
[3]魏钒.永磁同步电机无传感器控制技术研究[D].硕士学位,中国科学技术大学2020.
[4]吴伟.永磁同步电机无位置传感器控制策略研究[D].硕士学位,江苏科技大学2020.
[5]袁雷,胡冰新,魏克银等.现代永磁同步电机控制原理及仿真[M].北京航空航天大学出版社,2016.
[6]朱云国,阚超豪.无刷双馈发电机模糊PI无速度传感器控制研究[J].太阳能学报2016,37(2)282-289
作者简介:
朱国庆(1972 -),男,安徽安庆人,大学本科,工程师,主要研究方向:控制技术、物流技术改造。
3788500589215
