四稳系统的双重随机共振特性*
2021-03-04俞莹丹林敏黄咏梅徐明
俞莹丹 林敏 黄咏梅 徐明
(中国计量大学计量测试工程学院, 杭州 310018)
提出了一类8 次势函数并讨论了其分岔特性, 得到由左、右2 个小尺度双稳势和中间势垒构成的对称四稳系统.建立了在周期力和随机力共同作用下四稳系统输出响应的近似解析表达式, 并从能量角度引入功这一过程量来刻画大、小不同尺度双稳势之间的作功能力, 发现四稳势中存在着双重随机共振现象.理论分析与数值仿真结果表明, 当中间势垒高度大于左右2 个小尺度双稳势的势垒高度时, 四稳系统的响应随着噪声强度的变化由束缚在小尺度双稳系统中做小幅振动转变为跨越中间势垒的大幅振动, 功随噪声强度的变化出现了双峰曲线, 存在着双重随机共振, 且小尺度随机共振能增强大尺度随机共振的效应.
1 引 言
随机共振(stochastic resonance, SR)是1981年由Benzi 等[1]在研究周期性回归冰川期问题时提出的.经过30 多年的深入研究, SR 的内涵[2−5]不断扩展, SR 的应用领域[6−10]也不断拓宽.SR 将单一频率的有序周期运动与噪声的极度无序运动联系在一起, 展示了周期性和随机性之间的合作效应实际上是可能的, 表明噪声可以提高系统响应中的周期性程度, 并在一定的条件下增大了响应的幅度.
双稳系统[11−14]是研究SR 的经典模型, 人们相继研究了耦合双稳[15]、分段线性双稳[16]、指数型双稳[17]等双稳类系统, 分别采用将两个双稳系统通过非线性方式耦合为一个多稳态系统, 将经典双稳势函数的内外侧改为一次的线性形式和将二次项和指数项结合构成指数型双稳系统的方式来改变经典双稳系统的结构, 丰富其动力学特性的同时也提升了双稳SR 的性能.近年来, 人们又相继研究了对称三势阱[18−21]、非对称三势阱[22]、复合三稳[23]等三稳类系统, 这些研究表明在由三个势阱和两个势垒构成的三稳系统中, 粒子每周期来回运动跃迁次数增加, 噪声与非线性的作用也加强了,这有助于提高噪声利用率; 且由高斯势模型与混合双稳模型结合构成的复合三稳系统因保留了高斯势模型和能独立调整中间势阱的形态, 其性能优于三稳系统.因此, 非线性势函数结构对SR 效应具有重要影响, 而增加稳态个数是改变结构的方法之一.
1997 年, Vilar 和Rubi[24]提出一类复合系统模型, 并发现此类系统的输出信噪比可在不同的噪声值处呈现出多个极大值, 从而产生多重SR 现象,这引起了学者们的广泛关注.此后, 研究人员相继在余弦信号和高斯噪声驱动下的双稳系统[25]、余弦信号和色噪声驱动下的双稳系统[26]及周期矩形信号和色噪声共同作用下的时滞非对称双稳系统[27]中都发现了多重SR 现象.然而, 这些研究侧重于分析系统的特征参量(如噪声强度、噪声关联时间和关联强度等)对SR 的影响, 并未对多个共振峰之间的关系展开研究, 也未涉及SR 效应的增强与控制.
动力学系统的共振是由作用到系统的外力激发的, 不同类型的外力导致各自独特的共振状态,而共振效应的强弱可用振动幅度的大小或具有的作功能力来度量.噪声与非线性的作用主要体现在势垒的跃迁上, 从双稳到三稳既增加了稳态的个数也增加了可跃迁的势垒个数, 用作功[28,29]这一过程量更能细致刻画SR 过程中的能量变化.如何提高非线性振动系统的响应能力, 将噪声作为一种重要的动力学因素, 增强噪声与非线性相互作用产生的SR 效应是近年来人们关注的研究热点.
鉴于目前的研究都是围绕双稳系统和三稳系统展开且发现三稳系统的性能优于双稳系统, 本文研究了四稳系统的SR 现象.提出一类8 次势函数并讨论了其分岔特性, 得到由左、右2 个小尺度双稳势和中间势垒构成的对称四稳系统.根据绝热近似理论[30], 推导了四稳系统在周期力和噪声力协同作用下的输出响应的近似解析表达式, 并引入功作为SR 度量指标, 讨论了噪声强度对输出响应和周期力对系统作功的影响, 发现功随噪声强度的变化可以呈现双重SR, 进而从能量的角度, 讨论了噪声诱导的四稳系统双重SR 机理.
2 四稳势函数及随机能量共振
2.1 四稳势函数及其动力学特性
单位质量的布朗粒子束缚在势场 V (x) 中, 受到周期力 s (t) 、热随机力 Γ (t) 和势场力 V′(x) 的共同作用, 其动力学方程为

其中, Γ (t) 为强度为 D 、均值为0 的高斯白噪声,s(t)=Asin(2πft) 表示幅值为 A 、频率为 f 的周期驱动力, Υ 是单位质量的阻尼系数, 选取合适的单位 Υ =1 , V (x) 为非线性势函数, 且

式中, a 、b 、c 为势函数参数, 对 V (x) 求一阶导数, 得
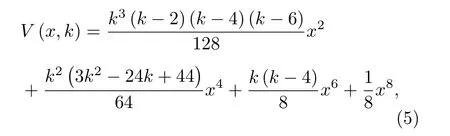
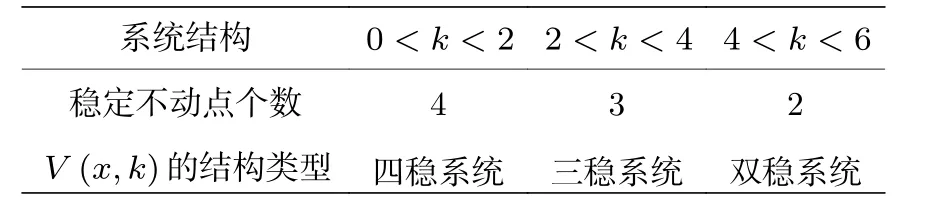
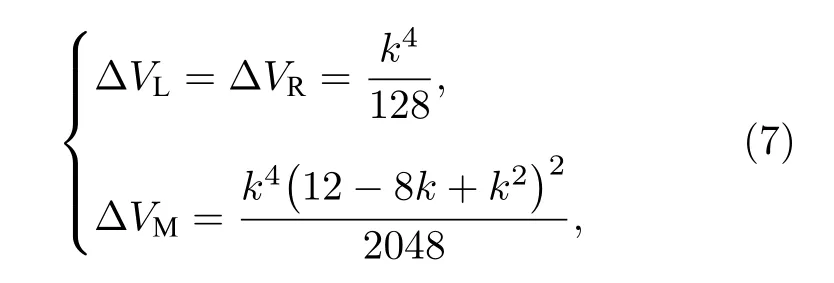
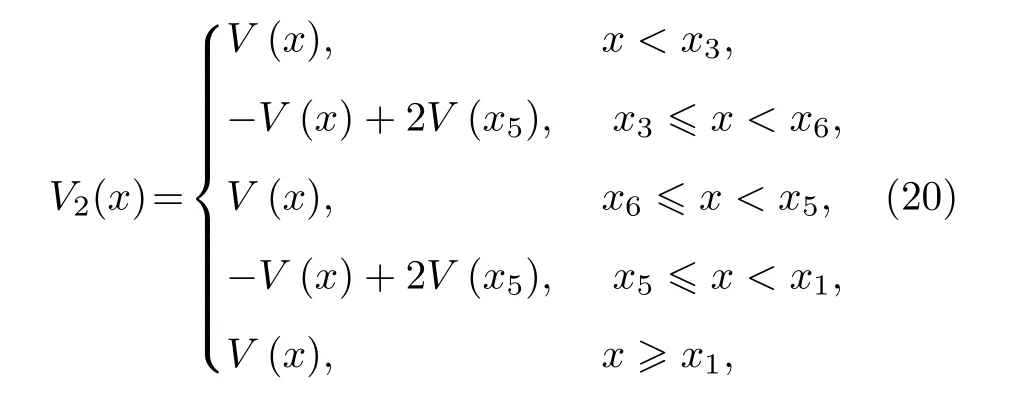
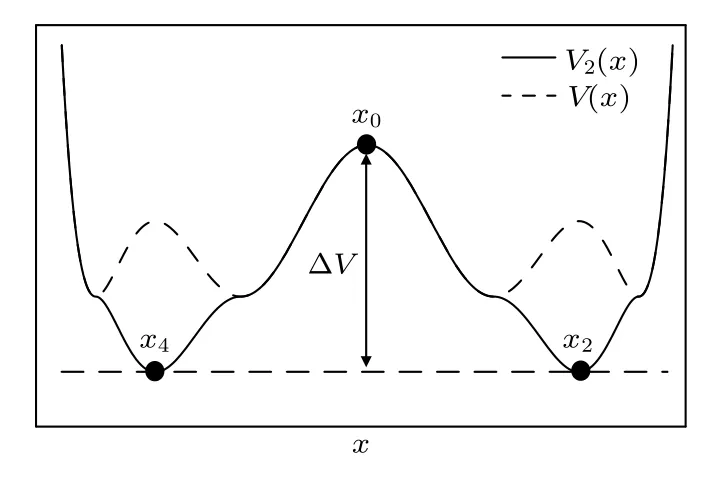
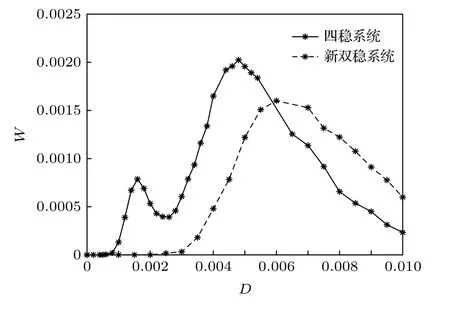
为便于分析, 引入参数 k (0 将其代入(2)式, 得 ∂V(x)/∂x=0 解方程 , 得势函数的不动点为 图1 给出了(5)式的分岔图, 表明了不动点对参数 k 的依赖性, 实线表示稳定不动点, 虚线表示不稳定不动点.从图1 可以看出, 当 0 随着参数 k 的变化, 系统不动点的个数及稳定性随之而变, V (x,k) 的结构类型与参数 k 的关系总结于表1 中.通过调节参数 k , 可以实现非线性系统在双稳系统、三稳系统、四稳系统之间切换. 当 0 图1 非线性系统(5)的分岔图Fig.1.The bifurcation diagram corresponding to the system(5). 表1 系统结构与参数 k 的关系Table 1.The relationship between potential structure form and parameter k. 图2 四稳势函数曲线Fig.2.The potential function curve of the quad-stable system. 其中稳态 x3,6(稳态 x1,5)和左(右)边势垒构成小尺度的双稳系统.左(L)、中(M)、右(R)三个势垒高度都是 k 的函数 在 k ∈(0,2) 区间内,d(∆VL)/dk=d(∆VR)/dk >0 , ∆ VL、 ∆ VR是单调递增的; 而 ∆ VM的变化并非单调, 在区间上单调递增, 在区间(3−上单调递减.当时, ∆ VM、∆VL、 ∆ VR均单调递增且 ∆ VM>∆VL=∆VR, 即中间的势垒高度大于左、右两边的势垒高度.当四势阱等深.当中间势垒高度小于左、右两边的势垒高度.势垒高度随参数 k 的变化如图3 所示. 图3 势垒高度 ∆V 随参数k的变化(实线: 左势垒高度∆VL ; 虚线: 中间势垒高度 ∆ VM )Fig.3.The relational curve of ∆ V vs k (solid line: height of the left barrier ∆ VL ; dotted line: height of the intermediate barrier ∆ VM ). 四稳系统存在着4 个稳态 x1、 x3、 x5和 x6, 定义 t 时刻粒子从稳态 xi(i=1,3,5,6) 跃迁到xj(j =1,3,5,6) 的概率为, 粒子处于稳态 xi的概率为 pi, 关于 pi的主方程 其中 当周期力幅值 A =0 , 只有随机力作用时, (8)式的解如下 其中 t 时刻系统输出为 x 的条件概率 则, 系统输出的均值〈x(t)〉为 由于 x (t) 是随机变量, 采用 x (t) 的统计平均〈x(t)〉来刻画其特性.(14)式表明系统输出响应〈x(t)〉 依赖于 pi(i=1,3,5,6) , 而(12)式表明pi(i=1,3,5,6) 是由四稳系统参数 k 、噪声强度 D 等决定的, 所以系统输出响应 〈 x(t)〉 与四稳系统参数 k 、噪声强度 D 有关.取信号幅值 A =0.0025 , 频率f =0.0001 , 四稳系统参数 k =0.8 , 根据(14)式得到不同噪声强度下系统输出响应的近似理论曲线,如图4 所示.图4 的横坐标是时间 t , 其单位是秒(s),纵坐标是系统输出 〈 x(t)〉 , 图4 表明, 当D =0.0005时, 粒子被束缚在小尺度双稳系统中做小幅振动.当 D =0.0015 时, 粒子具有的能量变大, 跃过中间势垒做大幅振动.即, 随着噪声强度从0 逐渐增大,粒子由束缚在小尺度双稳系统中做小幅振动转变为跨越中间势垒的大幅振动. (1)式两边同乘 d x , 得 图4 系统输出响应的近似理论曲线 (a) D =0.0005 ;(b)D =0.0015Fig.4.The approximate theoretical curve of system output response: (a) D =0.0005 ; (b) D =0.0015. U(x,k,t)考虑外力作用下的势函数 为 求微分得 将(17)式代入(15)式, 得能量平衡方程 其中, 周期力对系统做的元功dW =−2πfAx cos(2πft)dt.平均每个周期外力对系统所作的功为 功 W 与系统输出响应 〈 x(t)〉 有关, 而 〈 x(t)〉 又是由系统参数 k 、噪声强度 D 等决定的, 所以功受控于系统参数 k 和噪声强度 D. 图5 是 A =0.0025 , f =0.0001 , k =0.8 ,t0=10/f, n =500 时, 功 W 与噪声强度 D 之间关系的近似理论曲线.与经典双稳SR 不同, 图5 所示的曲线呈双峰形态, 表明四稳系统存在着双重SR 现象.随着噪声强度从0 开始逐渐增大, 粒子先被束缚在小尺度双稳系统中, 小尺度双稳系统、周期力和随机力相互作用产生小尺度SR 现象, 出现第一个共振峰.随着噪声强度增大, 粒子在周期力和随机力协同作用下, 可以跃过中间势垒做大幅振动,此时四稳系统、周期力和随机力三者相互作用, 产生大尺度的SR, 出现了更高的共振峰. 图5 功 W 与噪声强度 D 之间关系的近似理论曲线Fig.5.The approximate theoretical relational curve ofW vs D. 将两边势垒对称翻折下来构成新的双稳势函数 V2(x) (图6) 保持 t0=10/f , n =500 不变, 周期力在一个周期内对新双稳系统作的功 W2为 图6 势函数曲线(实线: 新双稳系统; 虚线: 四稳系统)Fig.6.The potential function curve(solid line: new bistable system; dotted line: quad-stable system). 式中的 r 为克莱默斯逃逸率 粒子跃过势垒需要的能量与势垒高度成正比.在新构建的双稳系统 V2(x) 中, 粒子从左边势阱跃迁到右边势阱只需要跃过一个势垒, 其势垒高度∆V 等于四稳系统的中间势垒高度 ∆ VM与右(左)边势垒高度 ∆ VR( ∆ VL)之和.这表明在四稳系统和新双稳系统中, 粒子从左(右)边势阱跃迁到右(左)边势阱需要跃过的势垒的总高度相同.图7 是保持 A =0.0025 , f =0.0001 , k =0.8 不变, 四稳系统和新双稳系统的功 W 随噪声强度 D 变化的近似理论曲线, 从图7 可以看出, 周期力对四稳系统、新双稳系统作的功随噪声强度变化的近似理论曲线分别呈现出明显的双峰和单峰特性, 四稳系统的两个共振峰对应的噪声强度都比新双稳系统的共振峰对应的噪声强度小, 说明四稳系统对噪声较为敏感.同时, 四稳系统的大共振峰对应的功比新双稳系统的共振峰对应的功更大, 其SR 效应更加强烈,说明小尺度的双稳SR 增强了大尺度系统的SR 效应. 图7 功 W 随噪声强度 D 变化的近似理论曲线(实线: 四稳系统; 虚线: 新双稳系统)Fig.7.The approximate theoretical relational curve ofW vs D (solid line: quad-stable system; dotted line: new bistable system). 数值仿真采用四阶龙格库塔算法, 采样频率fs=2.5Hz , 粒子初始位置 x (0)=x6, 考虑粒子运动的随机性, 计算采用500 个周期的均值.图8 是保 持 A =0.0025 , f =0.0001 , k =0.8 不 变, 功W随噪声强度 D 变化的数值仿真曲线, 图中的实线代表四稳系统, 虚线代表新双稳系统. 图8 功 W 随噪声强度 D 变化的仿真曲线Fig.8.The relational curve of W vs D. 图8 表明, 当噪声强度 D 在 0 ~0.01 区间变化时, 周期力对四稳系统作的功随噪声强度的变化曲线呈现“双峰”特征.随着噪声强度从0 开始逐渐增大, 粒子开始在初始稳态 x6附近的单一势阱内运动, 随着噪声强度的增大, 在周期力和随机力协同作用下, 粒子先在稳态 x3和稳态 x6之间来回跃迁,当噪声强度为0.0016 时, 功 W 达到第一个极大值0.00079, 对应的输出信号 x (t) 的时域波形如图9(a)所示, 时域波形具有非常明显的周期性特征.随着噪声强度从0.0016 继续增大, 周期力、随机力与小尺度双稳系统间的匹配关系逐渐被打破, 周期力的作功能力减弱, 功 W 的数值呈下降趋势.随着噪声强度的进一步变大, 粒子具有的能量增大至能跃过中间势垒, 在四稳系统的左势阱和右势阱之间做大幅振动, 作功能力又开始增强.当噪声强度为0.0048 时, 大幅振动的频率与周期力的频率一致,出现了功的第二个极大值0.0020, 粒子不仅在稳态x1(x3) 和稳态 x5(x6) 之间往复跃迁, 还具有足够的能量跃过中间势垒, 做大幅振动, 如图9(b)所示.噪声强度从0.0048 继续增大, 周期力、随机力与四稳系统之间的匹配度降低, 功 W 的数值呈下降趋势. 图9 输出信号波形 (a) D =0.0016 ; (b)D =0.0048Fig.9.The waveform of the output signal: (a) D =0.0016 ; (b) D =0.0048. 比较周期力对四稳系统、新双稳系统作的功,新双稳系统的共振峰对应的噪声强度为0.0060, 功为0.0016.四稳系统的大共振峰对应的噪声强度值为0.0048, 功为0.0020, 功的幅度增大了25%.且四稳系统的小共振峰对应的噪声强度为0.0016, 显然, 0.0016 < 0.0048 < 0.0060, 表明四稳系统在较小的噪声强度下就能达到共振. 数值仿真结果表明, 小尺度SR 能显著提高大尺度系统周期力作的功且四稳系统对噪声较为敏感.数值仿真结果与理论分析结论基本一致. 本文提出了一类8 次势函数并讨论了其分岔特性, 建立了四稳系统在周期力和随机力协同作用下输出响应的近似解析表达式, 引入功这一过程量作为SR 现象的量化指标, 研究了噪声强度对输出响应和功的影响.结果表明, 当中间势垒高度大于左右2 个小尺度双稳势的势垒高度时, 周期力对四稳系统作的功随噪声强度的变化曲线呈双峰形态,四稳系统存在着双重SR 现象.随着噪声强度从0 开始逐渐增大, 粒子先被束缚在小尺度双稳系统中做小幅振动, 出现第一个共振峰, 随着噪声强度继续增大, 粒子能跃过中间势垒做大幅振动, 产生大尺度的SR, 出现了更高的共振峰.将四稳系统的左右势垒对称翻折下来构成新的双稳势函数, 比较周期力对四稳系统、新双稳系统作的功, 发现小尺度的双稳SR 增强了大尺度系统的SR 效应且四稳系统对噪声较为敏感.数值仿真结果与理论分析结论基本一致.本文为今后进一步开展多稳SR 的研究提供了新的思路和方法.




2.2 四稳系统的动态响应





2.3 四稳系统的随机能量共振



2.4 大小不同尺度之间的共振



3 数值仿真结果及分析

4 结 论
