基于麦克纳姆轮的无线遥控式全向移动转运平台设计与分析
2021-02-22
北京航天发射技术研究所 北京 100076
0 引言
目前大多数转运支架车的移动均采用普通充气车轮及四连杆转向系统,虽能满足大部分工况使用需求,但在特定空间条件下,如作业通道狭窄的工作环境,现有转运支架车存在转弯半径大、空间利用率低、运动灵活性差等缺点,严重影响设备的工作效率[1]。而麦克纳姆轮全向移动机构很好地解决了这一问题,它可以实现平面内前后、左右、自转3 个自由度的运动,可以从当前位置快速移动到目标位置,其转弯半径为零,可避开静止和运动的障碍物,节省了运动空间和时间,非常适合工作于狭窄的工厂车间、仓库、医院、超市等场所,在排雷、核操作等领域也有着广阔的应用前景[2]。
本文提出了一种基于麦克纳姆轮的无线遥控式全向移动转运平台设计方案,4 个麦克纳姆轮分别由4 个电机驱动,通过控制算法完成任意方向上的平移和转动,为提高整车越障能力,每个麦克纳姆轮单独设置了特制的悬架机构,悬架机构弹簧水平布置,降低了整车高度,使转运平台在满载运行过程中更加稳定。
1 全向移动转运平台整体方案设计
1.1 整体结构组成
如图1 所示,全向移动转运平台主要由主车架、麦克纳姆轮组、悬架机构、控制系统、支撑托座、立柱等结构组成。4 个麦克纳姆轮组分别由4 个单独的电机驱动转动,轮组与悬架机构整体通过法兰与主车架螺接在一起,通过整体加工保证4 个轮组能够同时与地面接触,当某一轮组遇到障碍物时,悬架机构能够自适应障碍物高度,确保4 个轮组任何时刻均能够同时与地面接触,支撑托座及立柱均属于上装结构,用于承载或悬挂被运输物品,上装结构通过螺栓与主车架连接,可根据被运输物品结构特点设计不同的上装结构。
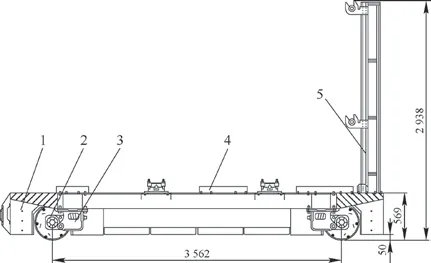
图1 全向移动转运平台结构示意图
1.2 电气布局及组成
全向移动转运平台的电气系统主要由驱动麦克纳姆轮的4 个电机、铅酸蓄电池、驱动器、DC/DC 电源模块、充电模块、指示灯、紧急停止按钮、触摸屏等组成,如图2 所示。
1.3 遥控器及触摸屏控制面板组成
全向移动转运平台采用无线遥控方式控制平台的移动,遥控器控制面板组成如图3 所示,主要由三轴摇杆、速度调整旋钮、系统指示灯、报警指示灯、钮子开关(预留)、按键开关(预留)、肩带连接结构等组成。其中三轴摇杆用于控制车体各方向运动,速度调整旋钮设置车体运行的最高限速,共分为6挡,各挡位所限制的x轴、y 轴移动速度及z 轴转动速度如表1 所示,系统指示灯用于显示设备软件程序运行状态,报警指示灯用于指示系统异常状况,钮子开关和按键开关为预留器件,用于功能扩展,肩带连接结构用于与肩带连接,操作遥控器时挂上肩带,可增加操作舒适度与安全性。
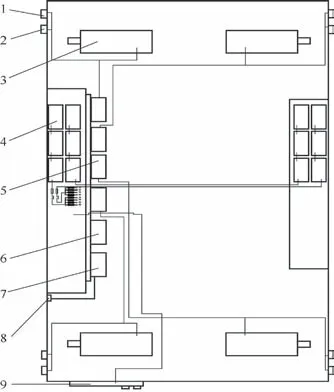
图2 电气布局示意图
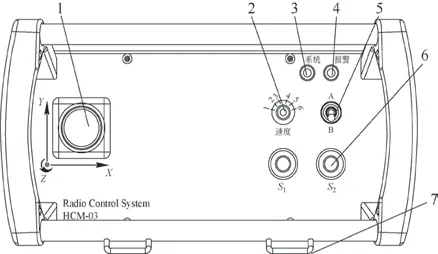
图3 遥控器控制面板示意图
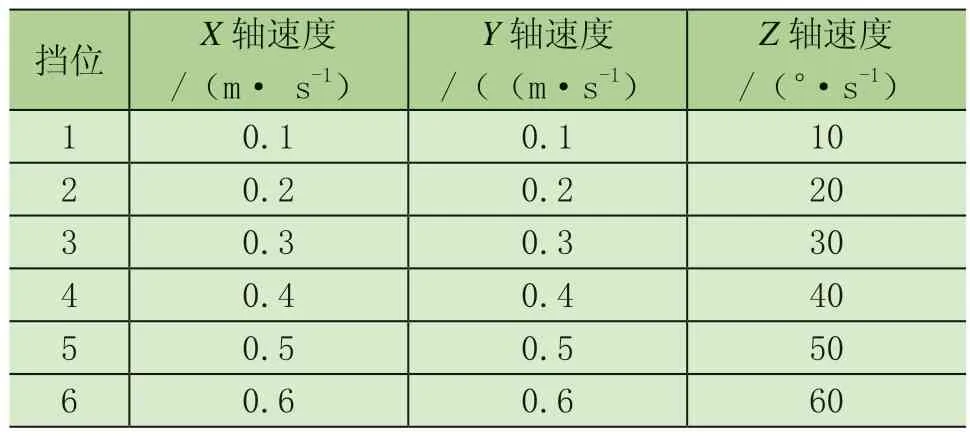
表1 挡位与最高限速对比表
在转运平台后端安装了控制面板,主要用于转运平台状态控制和检测,控制面板组成如图4 所示,主要由状态显示屏、充电电缆接口、充电指示灯、总开关、系统指示灯、有线控制接口、告警状态指示蜂鸣器、电源指示灯、急停开关、电量显示器组成。
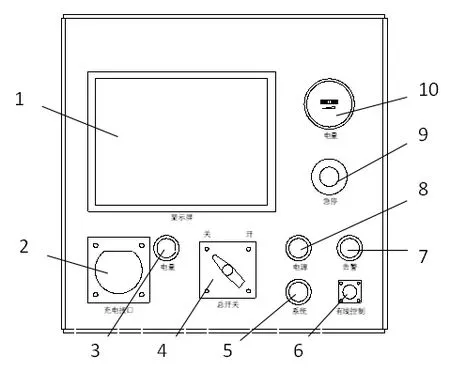
图4 控制面板示意图
其中状态显示屏用于显示转运平台的各种运行状态,充电电缆接口用于连接充电电缆,充电指示灯点亮为充电状态,总开关用于开关设备电源,系统指示灯用于指示设备软件程序正在运行,有线控制接口用于连接遥控器发射器,使设备进入有线控制状态,告警状态指示蜂鸣器用于在系统异常情况下告警,电源指示灯用于指示设备总开关已接通,急停开关用于在紧急情况下按下,使车辆紧急制动,避免危险或事故的发生,电量显示器用于实时显示转运平台电量。
2 转运平台运动学分析和控制策略分析
为便于分析采用麦克纳姆轮的转运平台的运动学特性,作以下几点基本简化假设:1)假定转运平台运动于平坦地面之上,忽略地面不平整带来的影响;2)假定转运平台为刚体,忽略麦克纳姆轮辊子、轮毂等的变形;3)假定麦克纳姆轮与地面的接触点在轮心正下方,忽略麦克纳姆轮转动过程中辊子与地面接触点的变化;4)忽略辊子与地面之间的打滑。
2.1 运动学方程
建立采用4 个麦克纳姆轮的转运平台和单个麦克纳姆轮的物理模型,如图5、图6 所示[3,4]。
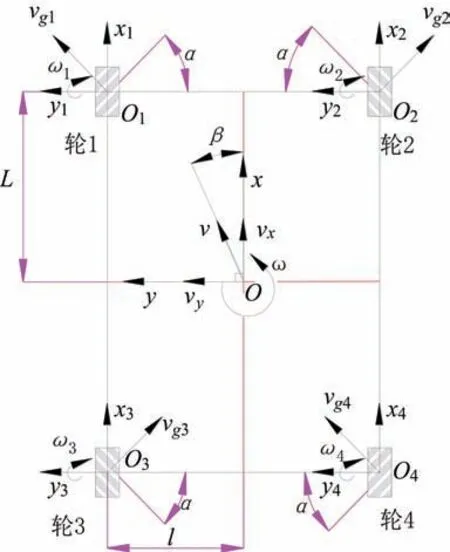
图5 转运平台物理模型
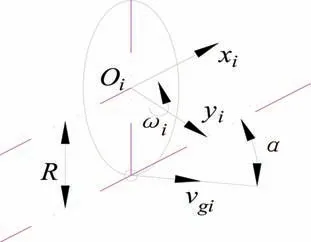
图6 单个麦克纳姆轮物理模型
图中:Oxy 为与整个转运平台固连的参考坐标系,O 点为转运平台中心,x 沿平台前进方向,y 沿平台左侧方向;Oixiyi为与各轮中心固连的坐标系;ω 为整车的转动角速度;vi为各轮中心速度;ωi为各轮转速;vgi为各辊子中心速度;α 为辊子中心与轮毂中心夹角,根据麦克纳姆轮结构可知,α=45°,其中各轮辊子的方向(图7 中阴影线方向)应按图示状态安装。
以轮1 为例,由坐标系Oixiyi和Oxy 分别可得到其速度方程为
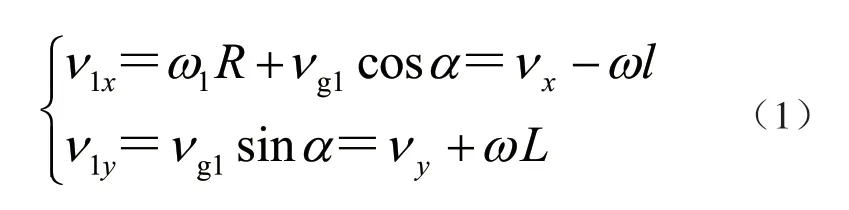
化简可得

将α=45°代入可求得

对于轮2~轮4,同理可得
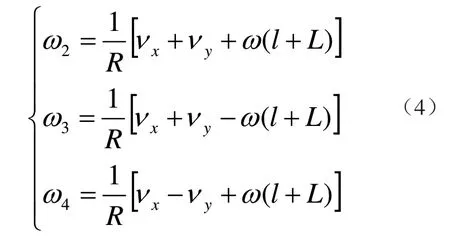
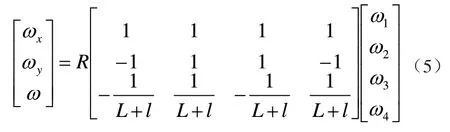
式(3)和式(4)综合即为麦克纳姆轮转运平台运动学方程,可采用矩阵形式表达为[5]
2.2 基本控制策略分析
根据运动学分析结果,可以得出转运平台在平面内各个方向运动时的控制方法。例如,若使转运平台仅作向前运动(即沿x 正方向移动),则有vx>0,vy=0,ω=0,将其代入逆运动学方程,可求得

由式(6)可知,若使转运平台仅作向前运动,则应使4 个麦克纳姆轮均朝同一方向作等速转动,各轮角速度方向应沿图示y 正方向。转运平台的前进速度大小为单个麦克纳姆轮角速度(ωi,i=1~4)与轮毂中心距地高度R 之积。同理,可以得出麦克纳姆四轮转运平台向后、向左、向右、原地旋转的控制方法。
3 悬架机构设计
悬架机构主要由基座、导向杆、弹簧、螺母组成。其中,基座通过回转耳与麦克纳姆轮组连接,并通过螺栓固定在车架上,麦克纳姆轮可绕回转耳转动,并通过弹簧将载荷传递至车架上。悬架机构示意图如图7 所示。
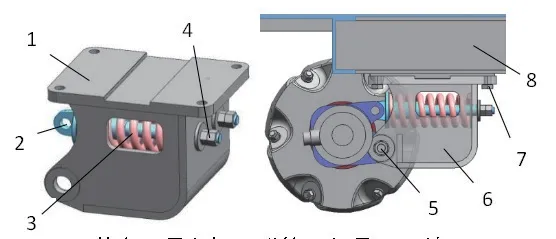
图7 麦克纳姆轮悬架机构组成示意图
悬架机构主要功能是为每个麦克纳姆轮提供预置推力,保证其在越沟、越障等过程中始终与地面接触,避免运动失控[6]。此外,悬架中的弹簧可为车架提供缓冲减震作用。悬架机构基本原理如图8 所示。
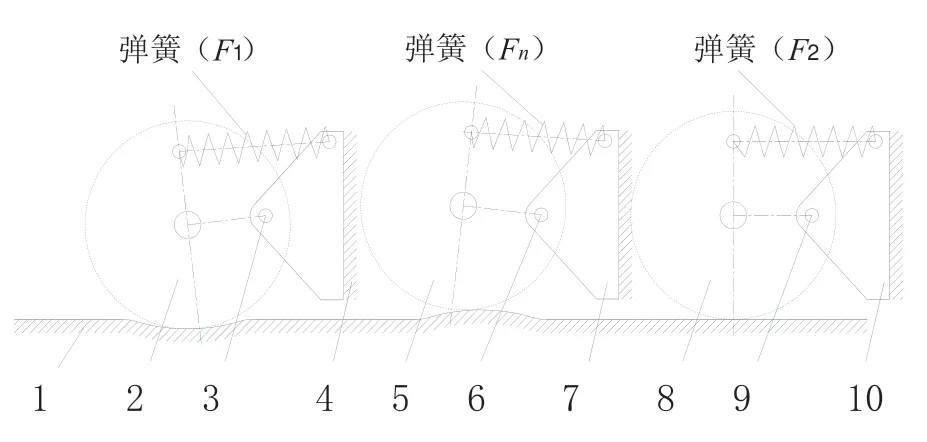
图8 麦克纳姆轮悬架机构基本原理
3.1 越障能力分析
对于麦克纳姆轮转运平台而言,需通过悬架机构保证轮毂不脱离地面,在遇到具有一定高度h 的凸起或凹坑时仍具备通过能力,即具有一定的越障或越沟能力(以下统称为越障)。弹簧是悬架机构的重要零件,其工作行程是设计弹簧的关键参数,故对地面起伏高度h 与悬架弹簧工作行程△l 之间的关系进行计算[7]。
建立单个悬架机构适应地面升降时的几何关系图,如图 9 所示。其中,A 为麦克纳姆轮的回转中心,B 为弹簧在车架上的固定点,P1、P2分别为弹簧在轮毂上的初始固定点、转动后固定点,O1、O2分别为麦克纳姆轮的初始质心、转动后质心,Q1、Q2分别为麦克纳姆轮与地面的初始接触点、转动后接触点。
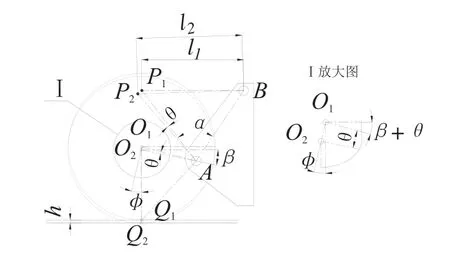
图9 悬架机构几何关系示意图
图中:a 为O1A、O2A 的长度,b 为P1A、P2A 的长度,c 为AB 的长度,α 为BA 和AP1的夹角,β 为O2A 与水平方向夹角,O1A 与水平方向夹角为(β+θ),φ为O1O2与竖直方向夹角,h 为地面升降高度,θ 为地面升降h 时的旋转角度,l1为弹簧初始长度,l2为转动后弹簧长度,△l 为弹簧长度变化量,△l=l2-l1。
首先分析△l 与转角θ 的关系,由余弦定理可得
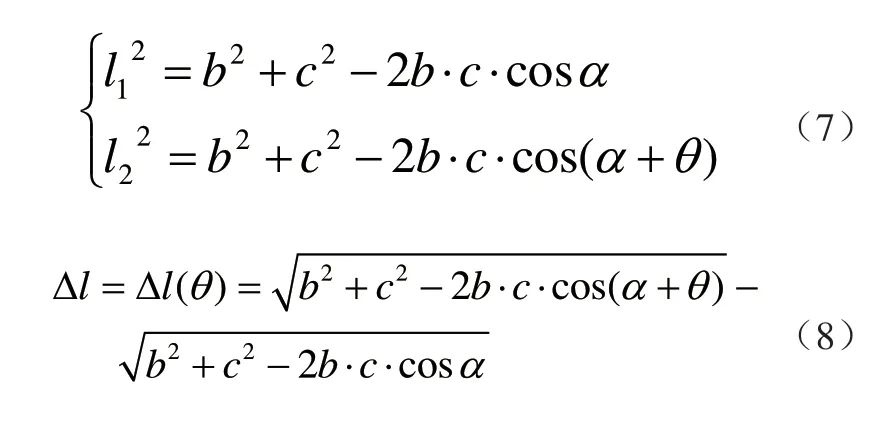
由式(8)可知,在[0,π]范围内,随着θ 的增大,△l 也随之增大。
根据图中几何关系可得h 与转角θ 的关系为

由式(9)可知,在[0,π]范围内,随着θ 的增大,h 也随之增大。
结合式(8)和式(9),可得地面升降高度h 与悬架弹簧工作行程△l 的关系式为
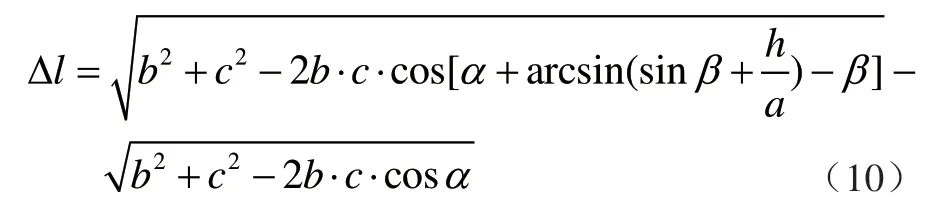
根据结构优化设计结果可知:α=70.6°,β=24°,a=115 mm,b=107.1 mm,c=272.4 mm。可得当前结构状态下,弹簧行程△l 与地面升降高度h 之间的关系曲线,如图10 所示,可知,随着h 的增大,△l 与h 近似为正比关系。
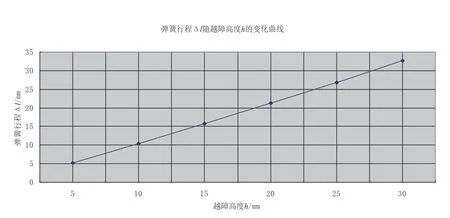
图10 悬架弹簧行程随地面升降高度的变化曲线
综上可知,悬架机构的越障高度与悬架弹簧的工作行程为近似正比关系,当需要实现5 mm、10 mm、20 mm 的越障能力时,悬架弹簧的工作行程应不小于5.1 mm、10.4 mm、21.2 mm。
3.2 悬架受力分析
在设计悬架弹簧时,应保证在空载和满载情况下,均对麦克纳姆轮具有一定的预制推力,保证其在升降过程中始终贴紧地面。为此,悬架弹簧力值应包络空载和满载情况下的所需载荷,即在空载和满载(包括偏载)情况下均能具有足够的越障能力。
建立麦克纳姆四轮全向移动支架车在空载(无偏载)和满载(有随机偏载)情况下的受力模型,如图11 所示。
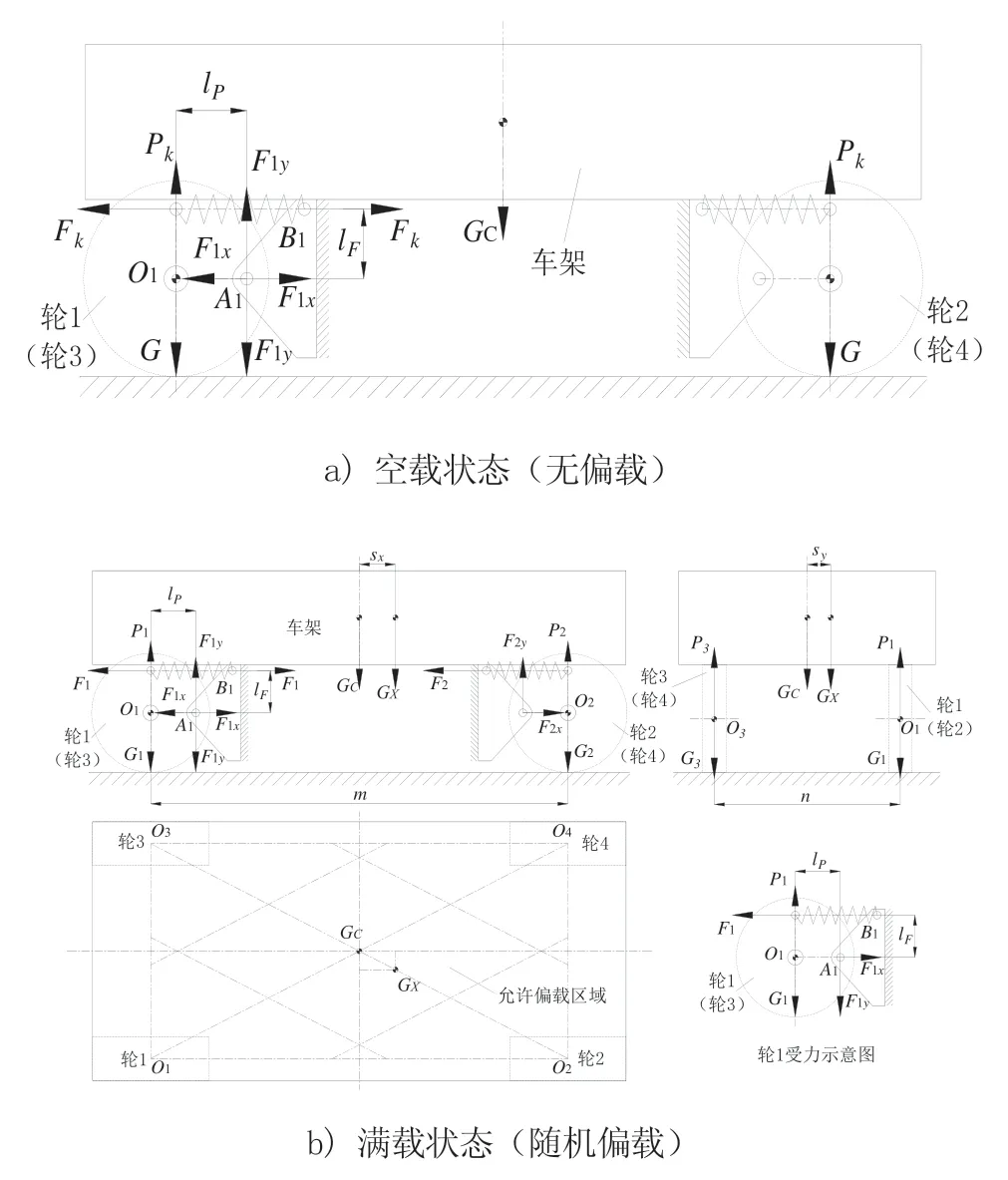
图11 悬架机构受力示意图
图中:Gc为整车重力(不含轮子),Gc=2.2 t=22 000N;Gx为负载重力,额定载荷为GX=2.2 t=20 000 N;G1~G4为每个麦克纳姆轮组所受重力(包括固定在轮毂上的电机和减速器),G=G1=G2=G3=G4=1 000 N;Fk为空载时每个悬架机构弹簧作用力;Pk为空载时每个轮子受地面的支撑力;F1~F4为满载时每个悬架机构弹簧作用力;P1~P4为满载时每个轮子受地面的支撑力。
1)空载状态
首先取整车为研究对象,由受力分析(竖直方向受力平衡)可知
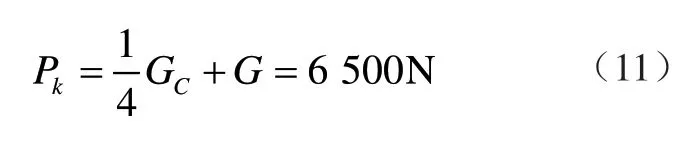
再取单个麦克纳姆轮为研究对象,由受力分析(力矩平衡)可知
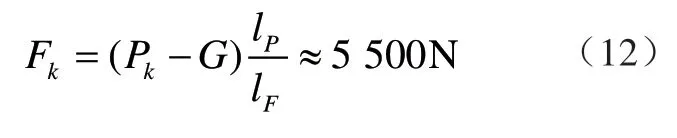
其中,根据结构设计和铰点优化结果可知,lp≈105mm,lF≈105mm,由于在车架和轮子相对运动过程中,lp、lF变化很小,为便于分析可视之为常数。
2)满载状态
考虑负载作用的随机性,以及4 点支撑的静不定情况,无法准确得出每个轮子的受力分配关系,为得到满载时所需弹簧作用力Fmax需,可按单个麦克纳姆轮额定载荷Pmax=2 t=20 000 N 进行计算,即有

另外,在轮距(O1O2O3O4)范围内施加负载的过程中,4 个轮子的支撑力不会出现减小的情况,故所需弹簧最小作用力Fmin需按空载计算结果进行设计,即有

单个悬架机构中设计两根并联的弹簧,设空载时所需单个弹簧作用力为Fmin,在满载时所需单个弹簧作用力为Fmax,则Fmin=2 750 N、Fmax=9 500 N。设弹簧设计力值范围为[F1,Fn],则有
①考虑空载时整车自身质心偏差,应有F1<Fmin=2 750 N;
②考虑包络单个麦克纳姆轮承受额定载荷时的所需弹簧力,应有Fn>Fmax=9 500 N。
3.3 越障能力校核
综合以上参数,合理设计弹簧参数[8],麦克纳姆轮转运平台的悬架机构具有以下越障能力
1)空载状态下,悬架单个弹簧作用力为Fmin=2 750 N,此时弹簧具备伸缩11.3 mm >10.4 mm 的能力,故空载时悬架机构具备10 mm 越障能力;
2)满载状态下,在单个轮子承载不超额定2 t 载荷的前提下,悬架的弹簧作用力不超过Fmax=9 500 N,此时悬架弹簧具备伸缩16.1 mm >10.4 mm 的能力,故满载时悬架机构具备10 mm 越障能力。
4 结论
基于麦克纳姆轮的无线遥控式全向移动转运平台目前已经在操作车间得到应用,操作简单方便,移动过程中占用空间小,移动灵活,一次充电可连续运行8 h。该产品与普通转运支架车相比避免了人力推行操作,空间利用率高,智能化程度高,应用前景十分广阔。