深井救援机器人的设计
2021-02-18尤劲恺谭信勇刘娜孔庆蕊
尤劲恺 谭信勇 刘娜 孔庆蕊

摘要:本项目旨在制造一个应用于深水井救援领域的救援机器人,以弥补该领域内专业救援设备的空白。该机器人由六个模块组成,分别是无线控制模块、快速移动固定模块、定位模块、救援执行模块、实时通信模块及生命支持模块。本机器人体积小,活动灵活,能在狭窄的井中进行多种操作,完成在狭窄空间内人所很难或不可能完成的任务。在使用本装置实施救援时,消防员只需在地面上进行远程控制便能快速完成救援任务。
关键词:救援机器人;深井救援;即时通信;远程控制
引言
目前,深井救援装置不多,已有的救援装置也没有得到很好的推广。大多数情况下是救援人员直接对被困者实施救援,如果井口太小,救援人员不能直接对被困者实施救援时,救援行动往往很难施展,只能通过挖开井口等效率低的方法来实施救援,这样延误了最佳救援时机,终将导致非常严重的后果。我们设计的深井救援机器人主要目的就是寻找一种用于小径深井救援的专用设备,通过它能够方便、快捷、有效地的解决小径深井中生命救援的问题,同时也为日常生活中重要物件的打捞提供一种方法。通过我们的设计,相信最终能够成功地解救宝贵的孩童生命、宠物生命,同时也能够打捞许多重要的物品,挽回重大的财产损失。
1硬件系统设计
根据该装置运行要求和功能需要,设计本系统电路控制部分,电路硬件资源包括:
主控芯片:STM32F103RCT6芯片。STM32F103系列单片机具有较高性价比的CPU, 具有支持定时器、ADC,DAC,SPI,IIC和UART的12通道的DMA控制器,STM32F103RCT6单片机拥有72MHz运行频率,工作速度快,效率高。
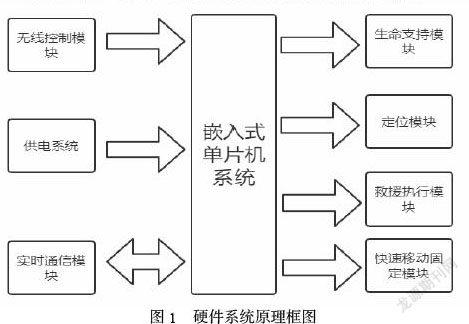
电源芯片:LM2596和LM1117-3.3。LM2596是常用的5V稳压芯片,可达到5V、1A的电源输出。LM1117-3.3通过内置电路将高电压稳定输出为3.3V,用于系统的单片机供电。系统控制部分结构框图见图1。
1.1单片机最小系统设计
为了保证单片机可以正常工作,需要在其周围构建硬件电路,由STM32F103RCT6芯片、复位电路和晶振电路组成。在单片机7引脚NRST上接一个104 的电容和复位开关到地,便可构成上电复位的电路。单片机5引脚、6引脚为晶振电路的接口。单片机最小系统电路见图2。
1.2地面支撑部分设计
地面支撑部分采用已有的设备----救援三角架,三角架下的钢绳另一端连接机械手。因为救援三角架上安装有手摇装置,于是可手动控制钢绳的升降,在井的深度方向上大范围的调节机械手,又因手摇装置带有自锁功能,能保证救援过程的安全可靠。
1.3定位部分设计
为了能够适用不同型号的井我们设计的定位部分由一对横向伸缩臂组成,伸缩臂是用丝杠来实现臂的伸缩的,伸缩臂的两端是一对弹性支撑臂,由于井的口径不一,横向伸缩臂通过伸缩手臂,顶住井壁,保证救援机械手的执行动作的时候稳定。而且通过伸缩,能够适应口径大小不一的井。
1.4调位部分设计
调位部分要求能够调节机械手在垂直方向和水平方向的位置,以使机械手找到合适的救援位置。为调节机械手水平方向的位置采用360度旋转盘,转盘下的可以上下运动的伸缩臂可以调节机械手垂直方向的位置。旋转盘采用蜗轮蜗杆装置,伸缩臂采用齿轮齿条装置,通过旋转盘的旋转和伸缩臂的伸缩,调整爪子的位置,使爪子处于合适的抓取位置,顺利完成夹持动作。
1.5 监控部分设计
监控部分由监视部分和控制部分组成,监视部分由照明灯、摄像头组成;控制部分有手动控制仪器及显示屏组成。在井底光线不好的情况下,照明灯将井底照明,使摄像头能够清晰摄取井底情况,摄像头将井底的图像传到地面上的显示屏,方便操作人员了解井底情况,根据井内的情况做出判斷,通过手动控制仪器手动控制机械手的动作。
1.6 夹持部分设计
夹持部分由一对可伸缩臂、爪子及机架组成。通过伸缩臂的横向运动,调节爪子的横向位置,使爪子处于合适的位置,从而对被困者执行抱起动作。爪子上面安装有压力传感器,当压力达到某设定值的时候,压力传感器将获得的信号传输给显示屏,操作人员对开关进行控制,使爪子停止运动,从而保证爪子不至于因用力过大而对受困者造成二次伤害。
爪子上下各有一对,初始位置上面的一对爪子在上面,下面的一对爪子处于基本竖直的位置,电机带动丝杆转动,滑块向下滑动,带动上面的一对爪子向下运功的,下面的一对爪子向上转动,使两对爪子间的空隙减小,实现夹紧。
1.7 夹持部分辅助设备设计
当被困者卡在井中时,使用此装置救援,此装置由齿轮齿条装置执行动作,由于被困者与井壁间的间隙较小,为减小装置所占用的空间,初始状态时装置处于合拢状态,救援时装置从被困人员与井壁间的间隙间穿过,到达被困人员的腋下部位时停止下降,两对合抱臂开始伸出,穿过被困人员腋下部位与井壁间的空隙,最后这两对合抱臂纵向合拢,将被困人员抱住,将装置拉出井既可以将被困人员救出。
2 技术路线及可行性分析
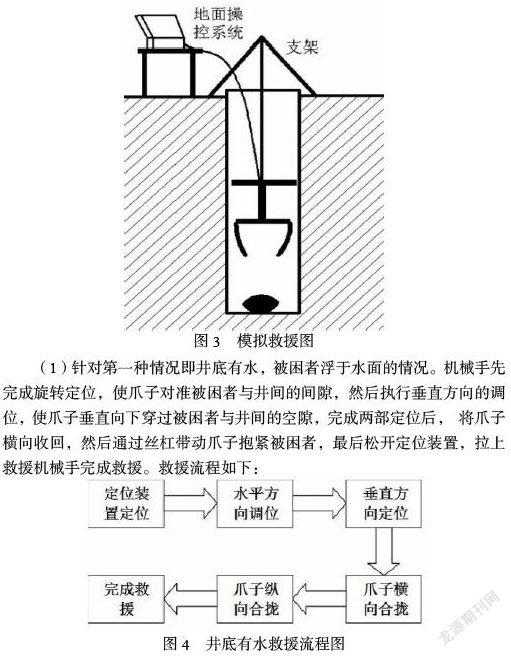
该装置主要由地面支撑架、钢绳、机械手三部分组成,在救援时支撑架固定于井口正上方,通过钢绳吊动机械手,使机械手能够上下运动。机械手由定位装置,调位装置和夹持装置组成,定位装置为两对称伸缩臂组成,在机械手降至井中适当的位置(被困者上方0.1m左右)时,由伸缩臂伸展开直至抵住井内壁,将整个机械手的空间位置固定。调位部分是由一电机带动下面的夹持装置转动,调整抓紧部分至合适位置(对准被困者与井内壁间的空隙)。抓紧部分是由两个可以伸缩,下部可以弯折的臂组成,调位好后,两臂伸长穿过被困者与井内壁间的空隙,下部弯折将被困者“抱住”。松开定位装置,通过钢绳将机械手拉出井口,完成救援任务。针对不同的事故情况,机械手爪子可以采用不同的操作实施救援,模拟救援如图3。
(1)针对第一种情况即井底有水,被困者浮于水面的情况。机械手先完成旋转定位,使爪子对准被困者与井间的间隙,然后执行垂直方向的调位,使爪子垂直向下穿过被困者与井间的空隙,完成两部定位后, 将爪子横向收回,然后通过丝杠带动爪子抱紧被困者,最后松开定位装置,拉上救援机械手完成救援。救援流程如下:
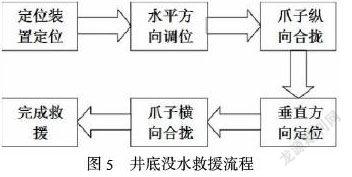
(2)针对第二种情况即井底没水,被困者掉到井底的情况。机械手先完成旋转定位,使爪子对准被困者与井间的间隙,通过丝杠传动带动爪子收回,使爪子处于接近水平,然后执行垂直方向的定位,使爪子垂直下降,直到接触地面,然后调节爪子水平位置的执行动作,带动爪子横向收回,慢慢“铲起”被困者,直到被困者被完全抱住,然后收回定位装置,拉起装置完成救援。救援流程如下:
3 结论
本设计包括供电系统、地面支撑结构、调位结构、夹持机械结构、整体框架结构、压力传感器调节、夹持部分辅助设备、头部监控部分、定位部分、控制部分、电机驱动部分。通过仿真模拟和调试,对深井救援机器人的结构、性能和控制进行了测试,能够满足整体设计要求替代了传统的深井救援方式,夹紧力可调可控制,避免造成对遇害人员的二次伤害。
参考文献
[1]李超. 基于柔性臂的小口径深井救援机器人研制[D].哈尔滨工业大学,2020.
[2]胡博,刘文超,张晓红.深井救援装置的设计与研究[J].襄阳职业技术学院学报,2017,16(03):79-82+85.
[3]江浩,王传江,张志献,吴建.一种小口径井下救援机器人系统设计[J].山东科技大学学报(自然科学版),2014,33(04):88-93.
作者简介:尤劲恺(2001-),男,浙江省台州市人,学士,研究方向:控制工程。
该项目由国家级创新创业训练项目《深井救援机器人》(202113320012)支持。
