基于安全A*算法的AGV路径规划
2021-01-29黄令苇全燕鸣王荣辉
黄令苇,全燕鸣,王荣辉
(华南理工大学 机械与汽车工程学院,广州510641)
近些年来,自动导引车(AGV)在物料运输、电力巡检等方面得到广泛应用。为完成工作任务,AGV 需进行自主运动规划,实现从起点到终点的运动,主动避开障碍物。其中由于A*算法作为一种静态路网中求解最短路径最有效的方法被广泛应用。
不少学者对其进行了研究。文献[1]在评价函数中引入惩罚因子和奖励因子, 解决了传统A* 算法拐点多的问题;文献[2]使用多层变步长搜索策略和姿态角信息,文献[3]基于二叉堆优化,两者均加快了路径搜索效率, 但所得轨迹拐点数均有增加;文献[4]采用双向预处理结构减少冗余节点数,但增加了路径长度;文献[5]在评价函数中引入机器人转向所需时间,减少了路径拐点,缩短了路径规划所需时间,但目前仅能在静态环境下运行。
以上研究均未能解决一个关键问题——传统A*算法所得路径易与障碍物十分接近, 对AGV 运行带来安全隐患。而且,此时AGV 为保证避开障碍物,需要降低速度。故在此改进评价函数,引入障碍物距离,提高AGV 运行过程的安全性及工作效率。
1 环境建模
对于AGV 的运行环境, 可以用二维栅格单元进行划分。对于一个大小为n×m 的栅格地图,可以根据某一个栅格位置是否有障碍物将地图分为2种区域, 即可行驶区域和不可行驶区域。当n=10,m=10 时,栅格地图如图1 所示。图中,白色栅格为可行驶区域,灰色栅格为不可行驶区域。
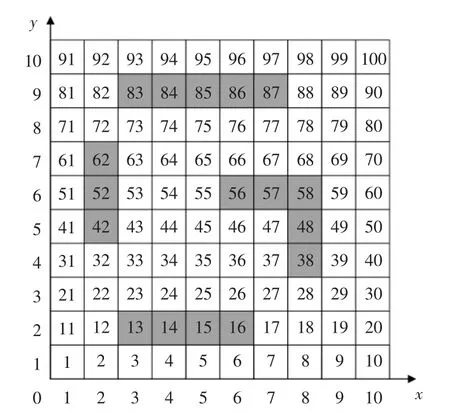
图1 栅格地图Fig.1 Grid map
定义集合P={1,2,…,n*m}表示所有的栅格编号,对于编号为i∈P 的栅格对应的坐标Pi=(xi,yi)有
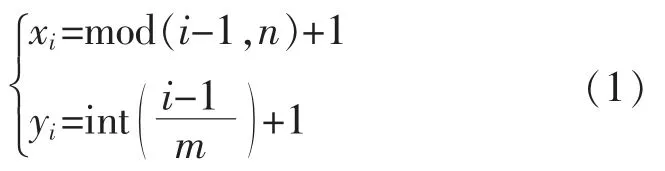
式中:mod()为取余函数;int()为向下取整函数。
2 安全A*算法
2.1 传统A*算法
传统的A* 算法是在Dijkstra 算法的基础上引入启发式函数,用于引导路径的搜索方向。算法的评价函数为

该算法步骤描述如下:
步骤1初始化2 个列表openlist 和closelist。openlist 用于存放已生成而未访问的节点,closelist用于存放已访问过的节点。
步骤2将起始点加入openlist。
步骤3若openlist 为空,则结束算法。否则计算代价最小的节点,并将该节点添置最优路径。
步骤4对当前节点n,以4 邻域或8 邻域的方式计算邻节点,遍历openlist 和closelist。若均不包含邻节点,则将其加入openlist。
步骤5循环执行步骤3 和步骤4,直至算法结束。
2.2 安全A* 算法
所提出的安全A* 算法是在传统A* 算法代价函数的基础上,引入当前节点n 距最近障碍物的代价,从而使生成的路径远离障碍物,保证路径的安全性,提高工作效率。
在拔桩过程中,假定管桩被土体掩埋,且地下水位降至桩底以下,此时为最不利情况。如图1所示,桩体受力作用分别为:桩体上拔力F,桩体自重G,桩底下吸力P以及桩周摩擦力 f。
2.2.1 凸走廊生成
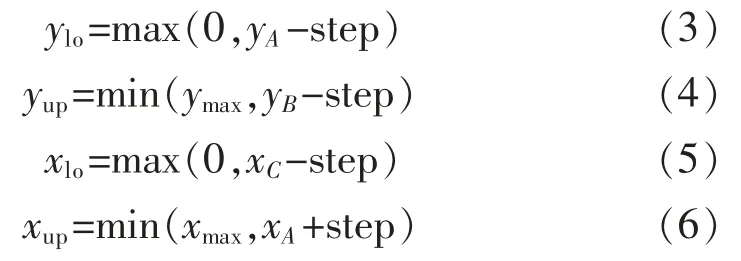
要找到距n 的最近障碍物,需要计算栅格地图M 中每一个栅格到n 的距离, 这样做的效率很低,因此参考文献[6],在此引入了凸走廊的概念。节点n对应的凸走廊如图2 所示。图中,黑灰色节点为n;浅灰色节点为所生成的凸走廊;A,B,C,D 为该凸走廊的4 个顶点。

图2 节点n 对应的凸走廊Fig.2 Convex corridor corresponding to node n
本文生成凸走廊的方法为: 以n 为起始点,按顺序依次沿y 轴正向y+,y 轴负向y-,x 轴正向x+,x轴负向x-进行扩展,当到达地图边界或遇到障碍物时停止扩展。其算法流程如图3 所示。

图3 凸走廊生成流程Fig.3 Flow chart of convex corridor generation
图中,ylo,yup,xlo,xup的计算公式为
式中:xmax为地图在x 方向栅格的个数;ymax为地图在y 方向栅格的个数;step 为搜索步长。
2.2.2 搜索最近障碍物
生成凸走廊后,选取安全距离safe_dis,该值可根据实际需求更改,取值范围为[0,min(length,width)],其中length 和width 分别为凸走廊的长和宽。然后,以n 为中心生成方形安全区域S,如图4 所示。
图中, 白色边框包围的区域为safe_dis=3 时的安全区域S。计算该区域中每一个障碍物到n 的距离,找到最小值min_dis。其算法流程如图5 所示。
2.2.3 评价函数改进
将传统A*算法的评价函数改为

式中:d(n)为n 到障碍物的代价;neutral_cost 为中等代价值,在此取常数50。
图4 生成的安全区域Fig.4 Generated security area

图5 最近障碍物搜索流程Fig.5 Flow chart of nearest obstacle search
3 仿真试验
为验证该算法的有效性,在此进行仿真试验。试验用计算机CPU 为Intel 酷睿i5-4200H 型,内存8 GB,在Gazebo 和机器人操作系统ROS (robot operating system)平台下进行仿真试验,仿真用AGV 为麦克纳姆轮系。仿真的三维环境及其膨胀地图如图6 所示, 考虑到计算栅格距离方法的不同会带来影响,统一设置使用曼哈顿距离计算。
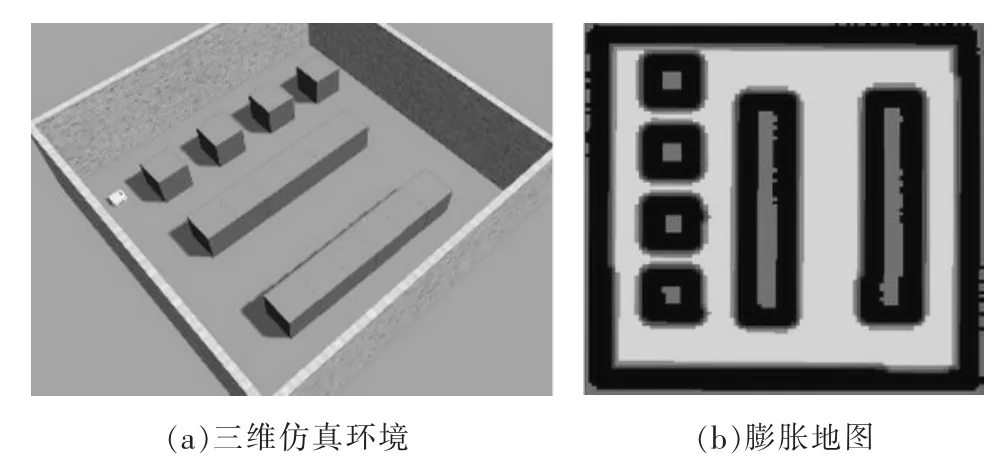
图6 仿真的三维环境及其膨胀地图Fig.6 Simulation of 3D environment and its expansion map
设置safe_dis=min(length,width),分别使用传统A*算法和安全A*算法进行仿真试验,结果如图7 所示。图中,路径的起点为S,终点为E。可见在当前情况下,由于safe_dis 较大,图7(a)中路径所在通道宽度较小,所有点的代价值较大,故会优先选择图7(b)所示通道宽度较大处的路径。
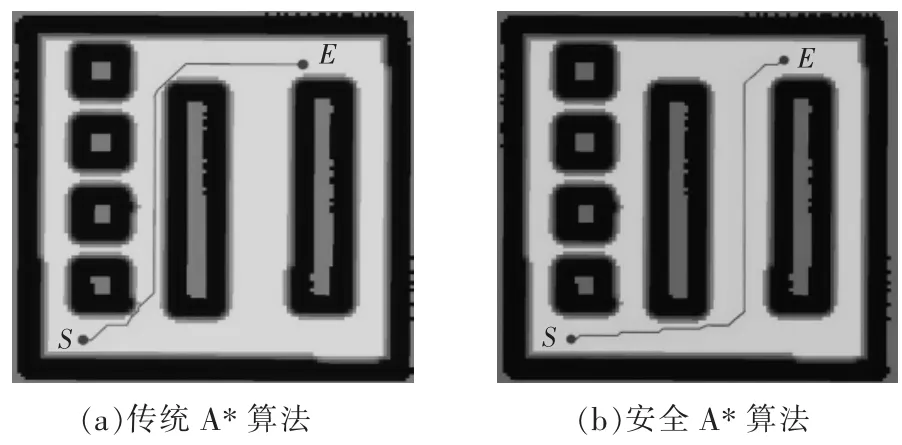
图7 不同算法所得到的路径Fig.7 Paths obtained by different algorithms
选取相同起点与终点, 分别进行10 次路径规划后的统计结果见表1。

表1 算法改进前后10 次的结果统计Tab.1 Result statistics of 10 runs before and after algorithm improvement
由表可知, 虽然安全A* 算法所得平均路径长度比传统A* 算法长5.64%, 但其每个路径点到最近障碍物的平均距离增加了50.00%,AGV 沿路径运行平均速度提高了42.86%,平均所需时间减少了22.57%。
由于设置不同的safe_dis 对结果会产生影响,故令

式中:α 为取值权重。在此,对α 取不同值后,分别进行试验,结果统计见表2。
由表可知,随着safe_dis 取值增大,所规划路径的长度呈上升趋势,到最近障碍物的平均距离呈上升趋势,平均运行时间呈下降趋势,平均运行速度呈上升趋势。这说明在该范围内,safe_dis 的取值应该越大越好。
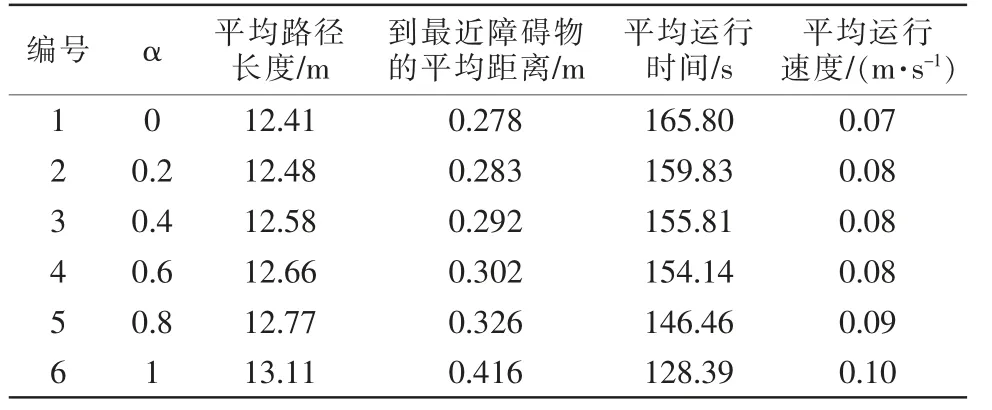
表2 α 不同取值时安全A*结果统计Tab.2 Safe-A* result statistics with different values of safe_dis
4 结语
利用提出的安全A* 算法,通过引入凸走廊,建立了安全区域, 得到了一条远离障碍物的安全路径。经过试验验证,相比于传统A*算法,安全A*算法提高了AGV 在运行过程中的安全性, 有效降低安全事故发生的概率, 且由于到障碍物的距离增大,可以给AGV 发送更大的速度指令,因此也缩短了AGV 执行任务的时间。
