机载光电跟踪系统的模糊控制算法研究
2021-01-29王晓迪扈宏杰
王晓迪,扈宏杰
(北京航空航天大学 自动化科学与电气工程学院,北京100191)
光电跟踪系统在军事领域中有着非常广泛的应用[1-2],但其结构中普遍采用的直流有刷电机的电刷与换向片之间存在机械摩擦,会产生金属粉尘甚至“环火”,不适合在机载低气压的环境下工作。随着光电跟踪系统性能的不断提高,直流有刷电机已难以满足要求,而永磁同步电机(PMSM)输出力矩平滑,且无需电刷换向,可靠性高,是替代直流有刷电机的理想选择[3-4]。
现有光电跟踪系统的跟踪回路多采用传统PD控制器进行控制,具有可靠性高、使用简单方便等优点,但因参数较为固定,系统快速性和超调量间的矛盾难以调和,且跟踪精度较差[5]。因此,本文设计了一种遗传算法优化的跟踪回路模糊PD 控制方案,根据脱靶量信息在线调整PD 控制器参数,从而使系统获得更加优秀的动态性能。
1 光电跟踪系统的控制原理
1.1 PMSM 的数学模型
采用矢量控制的方法[6],将定子电流矢量转换为励磁和转矩电流分量,方程如下:
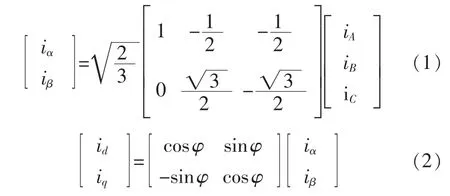
PMSM 的电磁转矩方程为

式中:ψd、ψq为定子在d、q 轴上的磁链分量。
采用id=0 的控制策略,则式(3)可写为

此时PMSM 等效为直流电机,可以控制q 轴电流以对电磁转矩进行控制。
1.2 光电跟踪系统的构成
采用跟踪回路内置稳定回路的方式进行控制,结构如图1 所示,稳定回路用来隔离干扰[7],而跟踪回路通过图像处理得到脱靶量,形成闭环控制,保证平台能够准确地保持在位置角度的指令值,是控制系统中保证平台跟踪性能最为关键的部分之一[8]。本文采用遗传算法优化的模糊PD 控制器代替传统PD 控制器实现对跟踪回路的控制,以使系统获得更加优良的性能。
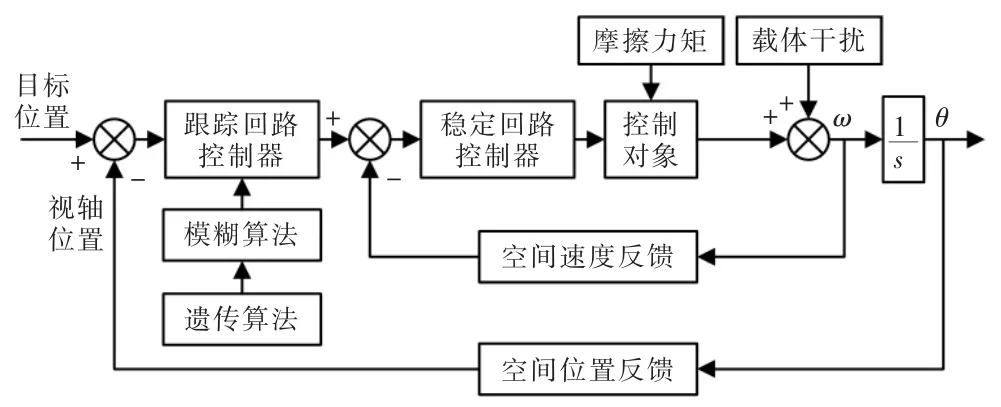
图1 光电跟踪系统的结构Fig.1 Structure of photoelectric tracking system
2 跟踪回路控制器设计
2.1 模糊PD 控制器的结构
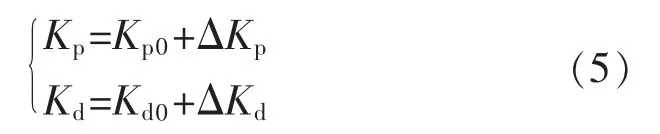
将模糊控制[9]与传统的PD 控制器结合起来形成模糊PD 控制器, 选取实时的脱靶量e 和脱靶量变化率ec 作为两个输入变量, 通过模糊运算求得Kp、Kd的调整量ΔKp、ΔKd,利用式(5)在线整定PD控制器的参数。
2.2 建立隶属函数
采用合适的比例因子将变量的论域转化到[-10,10],取模糊子集为{NL,NM,NS,ZO,PS,PM,PL},分别对应从“负大”到“正大”的语言变量。采用三角型隶属函数,且边缘设为Z 型,当位置偏差较小时,系统参数应有更加精细的划分,故e 取非均匀隶属函数,而ec、Kp、Kd的隶属函数取均匀形式,分别如图2 和图3 所示。
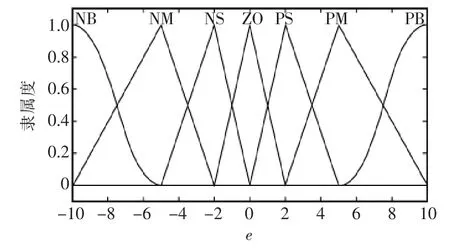
图2 e 的隶属函数Fig.2 Membership function of e
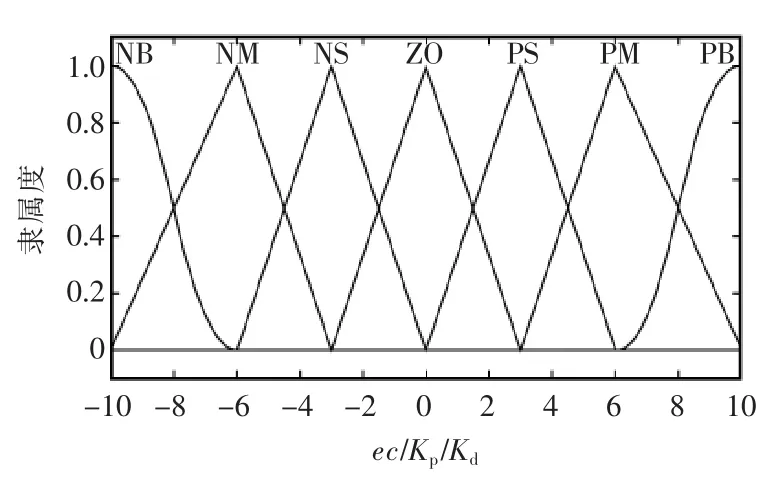
图3 ec/Kp/Kd 的隶属函数Fig.3 Membership function of ec/Kp/Kd
2.3 使用遗传算法建立模糊控制规则
传统的模糊控制规则通常依靠经验建立,具有很大的盲目性,本文采用遗传算法[10]进行寻优,并完成模糊控制规则的建立。设定种群数量为100,终止代数为40,每代精英个体数目为20,交叉概率0.8,变异概率0.001。综合考虑跟踪过程的快速性、超调量与精度,取性能指标为

式中:w1、w2、w3为权重;σ 为超调量;ts为系统调节至位置偏差满足要求精度的时刻;ea为系统调节至位置偏差满足要求精度后的绝对误差平均值,其计算公式为

式中:T 为总时间。
为了便于实际计算处理,将性能指标做相应转换,得到适应度函数:

式中:c 为灵敏度系数;k 为比例系数。
采用“IF…,Then…”的语句形式,经过遗传运算后得到模糊规则如表1 和表2 所示。

表1 Kp 模糊控制规则表Tab.1 Fuzzy control rule of Kp
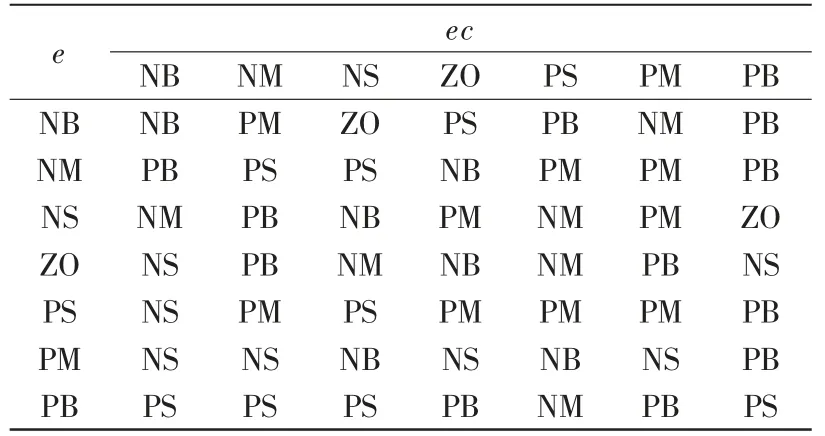
表2 Kd 模糊控制规则表Tab.2 Fuzzy control rule of Kd
2.4 模糊推理与解模糊化
建立模糊规则后,根据Mamdani 模糊系统的最大-最小法则进行推理, 并采用重心法解模糊化[11],其公式为

3 仿真与结果分析
电机基本参数如表3 所示,设定目标运动轨迹为x=1+0.1sin 2πt(°),载体扰动角速度为ωxd=ωyd=ωzd=sin(2πt)(°/s),设置控制器初始参数为Kp0=500、Kd0=0.5, 分别用传统PD 控制器及本文建立的模糊PD 控制器对跟踪回路进行控制,仿真结果见图4 和图5,可见使用模糊PD 控制器可以使系统拥有更小的超调、更快的调节过程和更高的跟踪精度。
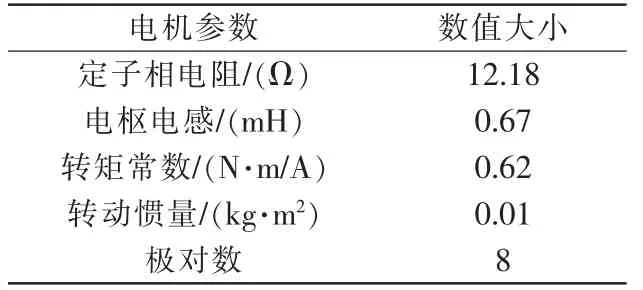
表3 电机各项参数Tab.3 Motor parameters
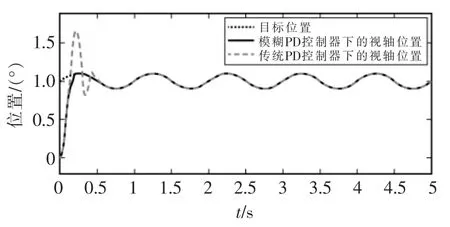
图4 跟踪过程中的目标位置与视轴位置Fig.4 Target position and boresight position during tracking
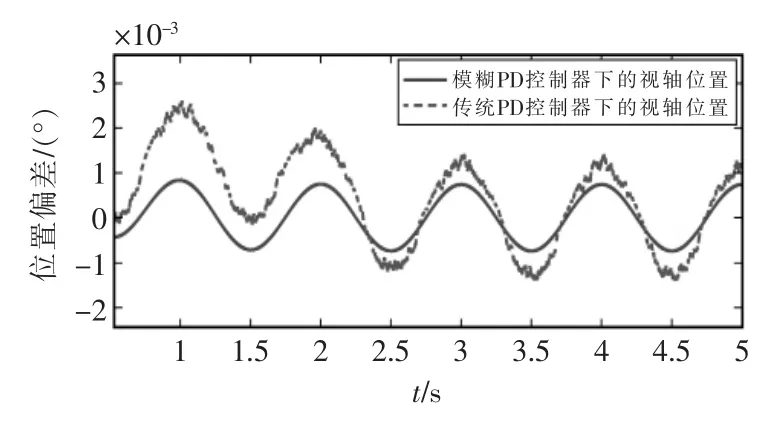
图5 跟踪过程中目标与视轴的位置偏差Fig.5 Position deviation of target and sight axis during tracking
图6 和图7 为模糊算法对Kp和Kd的整定过程, 可以得到整体规律: 位置偏差较大时,Kp和Kd都取较大值,以获得更快的调节速度;位置偏差适中时,Kp和Kd变化较大,在保证系统响应快速性的基础上防止产生较大超调; 位置偏差较小时,Kp取值很大,Kd取值较小,以提高跟踪精度。
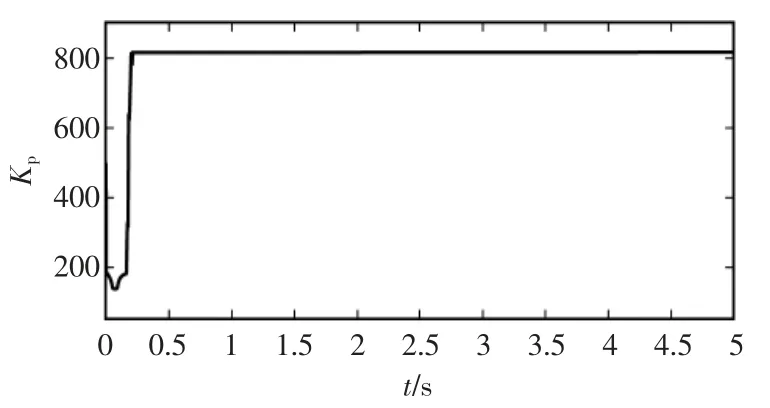
图6 Kp 的整定过程Fig.6 Tuning process of Kp

图7 Kd 的整定过程Fig.7 Tuning process of Kd
4 结语
本文采用PMSM 作为驱动,分析了光电跟踪系统的控制结构,并建立了相应的仿真模型。针对传统PD 控制在高精度光电跟踪系统中存在超调量大、反应较慢、跟踪误差大的问题,设计了应用于跟踪回路的模糊PD 控制器, 采用遗传算法优化模糊控制规则,并提出了一种适用于光电跟踪系统的适应度计算公式。仿真结果表明模糊PD 控制器的参数可以根据脱靶量和脱靶量变化率进行自整定,且模糊PD 控制器能够基本消除超调, 实现快速高精度的响应,相比传统PD 控制器有很大的优越性,具有很好的工程应用价值。
