自适应神经模糊推理的方向驾驶员模型研究
2021-01-27曹艳玲
曹艳玲,张 琦
(河南科技大学车辆与交通工程学院,河南 洛阳 471003)
1 引言
近年来随着我国汽车保有量的增加,交通事故总量也逐年增加,汽车安全问题已经引起了人们高度重视。然而这些交通事故的背后实际上与驾驶员对车辆的操纵有直接的关系。研究结果表明,80%的交通事故是由驾驶员误判造成的[1]。驾驶员对车辆的操纵实际上受到许多因素的影响。例如:驾驶技术水平、驾驶员对车况、路况的掌握情况、驾驶员生理、心理等因素。这些因素实际上是很难控制的。因此,针对驾驶员模型的应用是很有必要的,会降低人为原因引起的交通事故。
随着控制理论及传感器技术的发展,有效的推动了驾驶员模型的发展,将现代控制技术应用到驾驶员模型中是未来汽车行业的热门研究方向。根据建模的方法分为经典控制理论、基于模糊逻辑、神经网络等非线性控制理论及基于认知架构的驾驶员行为建模[2]。国内外很多学者均作出贡献:文献[3]建立的预瞄时间自适应的最优预瞄驾驶员模型,根据建立的优化函数,恰当的选取预瞄时间使得车辆稳定通过测试路径。文献[4]于1982 年提出了预瞄-跟随系统理论,将决策部分为预瞄和补偿跟随两个阶段,并建立了预瞄最优曲率模型。MACADAM CC 用BP 神经网络训练建立驾驶员模型[5]。文献[6]用遗传算法优化BP 神经网络,并建立了预瞄优化神经网络驾驶员模型。文献[7]基于遗传算法离线整定和神经网络在线整定的驾驶员模型,能够对轨迹进行很好跟踪。文献[8]以车辆航向角和横向位移偏差对车辆方向进行控制,并用遗传算法优化驾驶员模型参数,仿真显示所建立驾驶员模型能够有效跟随路径。文献[9]通过优化传统增量式PID 控制算法,提出了一种新型增量式PID 控制算法对车辆进行控制,车辆能够很好的对预期路径进行跟踪且响应速度较快。文献[10]设计了二阶自抗扰控制器对转向系统进行控制并结合建立的七自由度非线性车辆模型进行仿真,仿真结果显示二阶自抗扰控制器具有较高的控制精度。文献[11]提出了一种基于方向预瞄的内模驾驶员模型。仿真结果表明,所建立的内模驾驶员模型能够有效地用于汽车转向控制,并体现驾驶员对不确定参数的适应性。
驾驶员模型分为速度驾驶员模型和方向驾驶员模型,前者是通过节气门及刹车系统对车辆纵向速度进行控制,后者是通过操纵转向系统让车辆沿着目标轨迹行驶。以方向驾驶员模型为研究对象,首先在车辆动力学仿真软件Carsim 中采集道路参考线到预瞄点的横向偏差及道路参考线和车辆X 轴之间面积偏差数据。在Matlab/Simulink 中用自适应神经模糊推理系统对采集的仿真数据进行训练,将提取出的If-Then 规则读取到Fuzzy 控制器中并与车辆动力学仿真软件Carsim 中的车辆模型进行联合仿真。仿真结果显示跟踪轨迹误差较小且车辆的操纵稳定性较好,证明了基于自适应神经模糊推理系统建立的驾驶员模型具有良好的轨迹跟踪能力和良好的车辆操纵稳定性能。
2 车辆整车模型建立
2.1 Carsim 软件的简介
CarSim 是专业的车辆动力学的仿真软件其模型运算速度快,主要对车辆的操纵稳定性、制动性、平顺性、动力性和经济性进行仿真。近年来随着无人驾驶汽车的推动,CarSim 也用于无人驾驶汽车控制系统的开发。CarSim 具有160 多个可导入的输入变量560 多个输出变量,可以灵活的和Matlab/Simulink、Labview等仿真软件进行联合仿真。在Carsim 的主界面,其中左侧为车辆各组成部分的参数及仿真工况,中间部分是数学模型求解部分,最右侧是仿真动画和参数输出。
2.2 车辆模型建立
车辆整车模型包括:车体部分、空气动力学部分、传动系统、制动系统、转向系统、前后悬架系统、车轮,如图1 所示。仿真所用车辆参数均采用默认值。

图1 车辆模型建立Fig.1 Vehicle Modeling
3 自适应神经模糊推理的结构
由于模糊技术不需要建立精准的数学模型,因此在工程领域当中应用十分广泛。其实际上是将人们长时间工作的控制经验转化为相应的控制规则表,工作过程中根据需求输出相应的规则对被控对象进行控制。但是模糊控制器规则的确定和隶属度函数的调整通常需要长时间的工作经验或者专家知识,这些通常具有一定的主观性。因此模糊规则的确定及隶属度函数的调整往往成为建立模糊控制器的主要难题。神经网络是模拟人脑建立起来的数学模型,具有一定的人脑功能,如:模式分类、联想记忆、信息处理、自学习。其中自学习功能是是神经网络的最大优势,从而使其具有一定处理信息及推理能力。综上所述,如果将模糊控制技术及神经网络控制技术融合在一起,就能有效降低人们在设计模糊控制器过程当中遇到的困难,例如:隶属度函数的选取及调整、模糊规则的确定、人的主观因素对模糊规则的影响等。
自适应神经模糊推理系统能够有效解决上述问题,神经网络技术能够从大量的输入输出数据中自动建立模糊推理系统(FIS),其中模糊规则的提取和隶属度函数的选取及优化是使用神经网络技术计算得出,让人们从建立模糊控制器的难题中脱离出来。
3.1 自适应神经模糊推理系统的结构
自适应神经模糊推理系统以Takagi-Sugeno 模型为基础,ANFIS 结构图,如图2 所示。对于一阶Takagi-Sugeno 模糊具有如下If-then 规则。

式中:x、y—系统两个的输入;fi—系统的唯一输出;Ai、Bi—模糊集;pi,qi,ri—训练过程中确定的参数,每层节点具有相同的函数。

图2 ANFIS 系统结构Fig.2 ANFIS System Structure
第一层:对x 和y 两个输入变量进行模糊化。

式中:x、y—输入;μAi-2、μBi-2—隶属度函数。
第二层:本层的固定节点用于计算每条规则的适用度,将所有输入信号相乘并输出。

第三层:本层的固定节点对每条规则进行归一化计算。

第四层:本层节点是自适应节点用于计算各条规则的输出。

式中:ωi—激励强度;{pi,qi,ri}—结论参数。
第五层:本层为一个固定节点,将上层所有输入进行求和作为系统的总输出。

4 基于ANFIS 的方向驾驶员模型
4.1 训练数据采集
训练数据通常通过试验采集或者仿真采集,训练数据由车辆在车辆动力学软件Carsim 中进行典型路况的仿真来获得。选取道路参考线到预瞄点的横向偏差及道路参考线和车辆X 轴之间面积偏差两个变量作为自适应神经模糊推理系统的训练数据,仿真共获得1200 组数据。
4.2 自适应神经模糊推理的方向驾驶员模型的训练
4.2.1 调用Anfis 编辑器
以Matlab R2016b 版本来进行ANFIS 的设计及训练。首先启动Matlab 在主窗口输入Fuzzy 点击回车出现FIS 编辑界面,在FIS 的界面菜单中点击File→New FIS→Sugeno 弹出FIS 编辑器(Sugenon)界面。因为输入数据为两组故需添加一个输入变量使之成为双输入单输出的结构,点击菜单File→add Variable→Input。再点击File→Export→To Work space 将控制器名字改为“jiashiyuanmoxing”,将两个输入变量的名字改为L 和A 输出变量名字改为SW。
4.2.2 导入仿真数据
在FIS 的界面菜单中点击Edit→Anfis 弹出Anfis(jiashiyuanmoxing)界面,并载入1200 组仿真数据用于训练,并选取偶数行数据作为测试数据并分别命名为“jiashiyuanxunlianData”“jiashiyuanceshiData”。
4.2.3 模糊推理系统初始化及训练
在编辑窗口的Generate FIS 区域选取Grid partition,点击Generate FIS 进行初始化设计,隶属度函数选取三角函数(trimf)型并将隶属度函数设置为(8 8)输出类型选取linear。然后在Train一栏中将Optim.method 设置为hybrid,Error Tolerance 误差精度设置为0,Epochs 设置为最大次数50 次。点击Train Now 进行训练,得到模糊规则,如图3 所示。最后将自适应神经模糊推理得到的Fis 读取到Fuzzy 控制器中,将其作为方向驾驶员模块并命名为“jiashiyuanmoxing”。
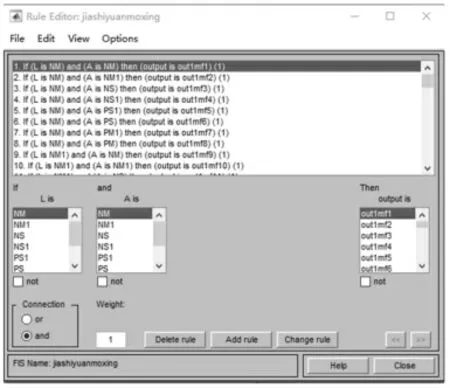
图3 规则查看器Fig.3 Rule Viewer
5 联合仿真
方向驾驶员模型和整车动力学模型联合仿真结构图,如图4所示。其中“jiashiyuanmoxing”为方向驾驶员模块。“CarSimS-Function”为第二章所建立的整车动力学模块。其中“jiashiyuanmoxing”模块根据道路参考线到预瞄点的横向偏差及道路参考线和车辆X 轴之间面积偏差两个输入变量决策出最优的方向盘转角SW,在输入到CarSim S-Function 整车动力学模块中对车辆转向进行控制,Carsim 将求解出来的两个车辆变量再输入到“jiashiyuanmoxing”方向驾驶员模块中以此循环对车辆实时控制。联合仿真的优点是直接调用Carsim 中的车辆动力学模型省去了搭建物理样机实验的周期且仿真数据获取方便。

图4 联合仿真结构图Fig.4 Joint Simulation Structure Diagram
6 仿真结果分析
为了证明建立的自适应神经模糊推理的方向驾驶员模型的路径跟踪的有效性,设定在双移线工况进行联合仿真,路面附着系数设定为0.85,仿真位移设定为210m。由于进行单一方向仿真,故车速设定为恒速120km/h。仿真结果分析:方向驾驶员模型的输出变量方向盘转角,如图5 所示。路径跟踪结果,如图6 所示。根据仿真结果显示:基于自适应神经模糊推理的方向驾驶员模型的横向位移误差在(-0.15~0.1)m 跟踪误差较小,我国公路规定的宽度为3.75m[12],根据仿真输出数据,所产生的跟踪误差小于道路单侧宽度。综上所述:基于自适应神经模糊推理的方向驾驶员模型具有良好的跟踪性能。

图5 方向盘转角Fig.5 Steering Wheel Angle

图6 路径跟踪Fig.6 Path Tracking
7 结论
为了提高方向驾驶员模型对目标路径的跟踪精度,进行了以下工作与创新:(1)在Carsim 中建立了整车模型,仿真出一台较为真实的整车模型提高了被控对象的精度,使控制结果更加准确。(2)将自适应神经网络的模糊推理系统用于方向驾驶员模型领域。仿真结果表明,将神经网络技术能够有效的用于完成模糊规则的提取、隶属度函数的选取及优化,提高了方向驾驶员模型的建模精度。
综上所述,建立了一种基于自适应神经模糊推理的方向驾驶员模型,根据道路参考线到预瞄点的横向偏差及道路参考线和车辆X 轴之间面积偏差两个变量,决策出最优的方向盘转角对车辆进行转向控制。根据仿真结果可得以下结论:所建立方向驾驶员模型具有良好的非线性能,能较好的对目标路径进行跟踪,能够真实模拟驾驶员对车辆的操纵行为。