应用分层布局的开槽机方案设计
2021-01-27杨佳佳萨日娜李纬天
杨佳佳,萨日娜,李纬天
(内蒙古工业大学机械学院,内蒙古 呼和浩特 010051)
1 引言
随着科技进步和当前机械领域的快速发展,机械产品也开始面临应对当前新型工业化带来的挑战,对其升级来满足生产需要。开槽机是装修行业和建筑行业的主要使用设备。若设备的体积小、稳定性好、工作效率高,则在现实工作中可以实现高效、安全、经济的作业。经过实际考察和施工人员的要求。对开槽机进行升级设计。升级后的开槽机在现有基础上增加了(水箱、导轨、履带轮、液压杆、控制系统)等相关部件,开槽机是一个包括机械结构、各类零部件、动力装置、控制系统等的复杂系统。有功能复合化、结构多样化的特点。各组成部件的布局是开槽机升级的重要环节,布局问题涉及到计算几何、计算机图形学、运筹学、逻辑推理等多学科、多领域的知识,属于复杂的组合优化问题。其复杂度具有:布局问题的模型一般非常复杂,很难用数学模型进行完全、准确地描述,需要用复合知识模型来表达;布局的合理与否也直接影响生产及操作使用,决定设备的工作效率。
布局设计问题在机械工程、航空航天、交通运输、模式识别、机器人手臂运动规划、大规模集成电路的设计、出版印刷、造船、建筑设计和城市规划等诸多行业的应用十分广泛。对产品设备升级上的布局设计问题,国内外学者在复杂的内部部件布局方法上进行研究。文献[1]采用遗传算法对中的多目标和多约束的机械优化设计优化问题进行探讨。文献[2-4]提出了部件图元化、矩形外包面积等,通过约束来解决布局问题。文献[5]提出从上到下的设计思路,将按照属性信息、行为信息和形位信息对产品设计中的布局约束进行分类。并且将布局约束分为部件级、零件级和特征级,应用分层表达来讨论约束层次、整体到局部之间的相互联系。文献[6]提出了基于产品级的组件特征概念及其相应的面向产品布局设计的组件特征模型。文献[7]从机械部件智能布局出发,通过对机械部件之间的约束关系进行知识整理、归纳,建立了一个面向机械部件智能布局且又基于知识的简化约束模型,实现了一个基于约束关系的机械部件布置系统。文献[8]提出一种定位法布局方案,运用遗传算法来优化布局问题。文献[9]研究了卫星舱布局优化问题,建立数学模型,求解了矩形布局问题和多边形布局问题,并且通过算例验证了所用方法的有效性。文献[10]通过研究机械产品的运动方案设计与结构方案设计,并进行了精确的数学描述与表达,为结构与布局方案设计提供了一种理论设计方法。文献[11]通过产品层次信息模型中的数据映射与约束映射,实现产品信息的层次间关联。
以上研究对复杂产品及设备的内部部件布局提供了理论及方法,然而布局设计问题在工程领域方面的研究还比较薄弱。在产品及设备的内部部件的布局上,部件大多属带约束的布局问题,往往采用人工方式来解决布局问题,即由布局设计人员按照实际布局要求,通过布局模型或根据自身经验进行试验或摆放,经过多次反复找出可行的布局方案。同时受部件复杂性和布局求解时间的限制,在布局设计中会错过或者未发现一些较好的方案。当布局规模比较精密、布局物体形状较为复杂、约束条件较多时,人工方式布局效率就显得很慢。
开槽机的布局设计显得特别重要,设备内部布局可以布置得更加紧凑、高效。将开槽机升级中所用到的功能一一列举出来,功能模块联想产品及部件,产品及部件可简化成规则的几何体在空间进行布局。开槽机设计所涉及的布局问题可以看作是具有空间性能约束的布局问题,将大小、体积不同的物体放入到某一个指定大小的空间。物体与物体、物体与空间外围还存在着多重约束。将三维的升级开槽机的部件进行三视图投影,其部件可以转换成多个二维几何图,通过对开槽机部件的二维几何图元之间的相邻和干涉关系、合理性布局进行判断。然后在满足约束关系的情况下,以这些二维几何图作为布局图元对开槽机进行分层布局设计,该设计对开槽机部件考虑了分层布局与部件间多重约束关系两方面因素,以一种从下到上、从内到外的设计思路展开设计。采用三维还原后的关键点对整体外形进行预测,满足体积大小、部件的干涉、相邻关系和合理性的要求,得到开槽机部件布局方案的优化结果。
2 开槽机分层布局模型
2.1 开槽机部件模型建立
首先要对三视图中部件几何图元的重叠区域进行调整,采用三视图相互转化的方法,对重叠区域进行拆分。正视图中,如液压杆和导轨、电机和传动装置出现重叠关系,所以可以将液压杆和导轨的位置关系转化到侧视图中,这样可以在不影响其投影几何图元大小的情况下,清晰的找到位置关系。电机和传动装置可以转化到俯视图中,亦可清晰找出其位置关系和约束。对椭圆、圆等几何图形近似成矩形,方便后期数据处理和计算。此外,在同一俯视图上,重叠的部件会影响后期的布局,经过对开槽机内部部件的分析,提出分层式布局的方法,解决同一视图中部件较多而引起重叠的布局问题。拆分的第一层部件,如图1(a)所示。拆分的第二层部件,如图1(b)所示。
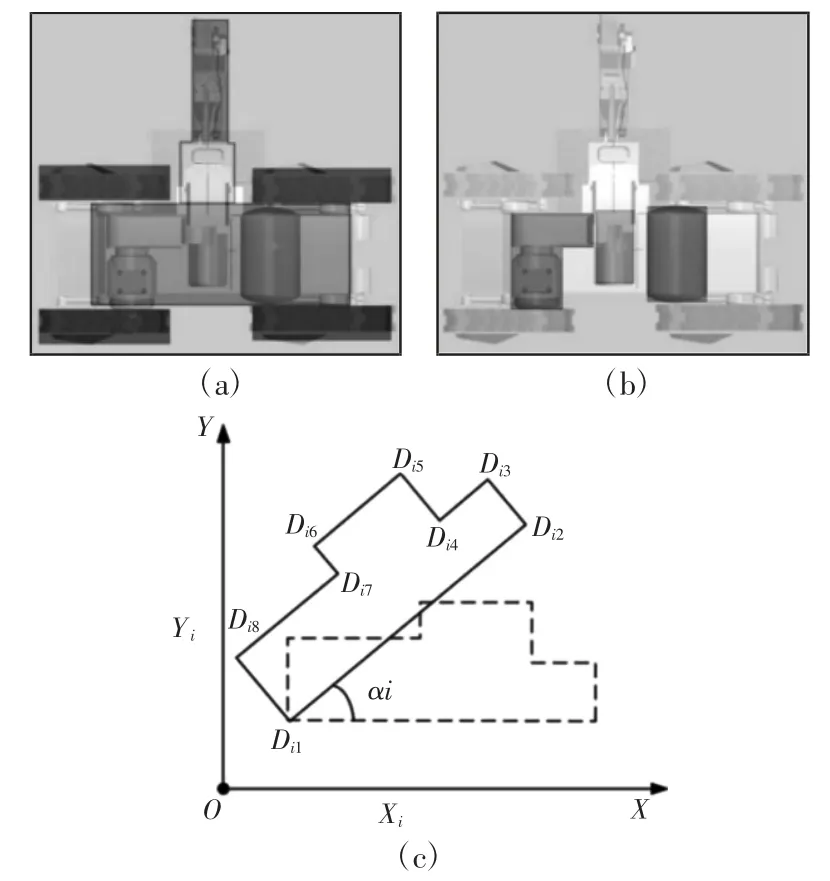
图1 二维布局示意图Fig.1 Two-Dimensional Layout Schematic Diagram
2.1.1 第一层部件模型
将第一层(最底层)的部件进行俯视投影,底层的履带轮、机体底盘、导轨、刀头这五个重要部件可近似为二维图形图元,记作Bi,i∈{1,2,…,5}。如图1(c)所示。型心可以为各个顶点即 Qi=Dik=(xi,yi),xi,yi∈R。Bi的各个顶点沿逆时针方向分别记为Dik,k∈{1,2,3,4…,i}。矩形的长边 Di1Di2与 x 轴的夹角为 αi,记作αi∈[0,2π),i∈In{1,2,…,n},取逆时针为正方向。平行于Di1Di2的向量记作 ai=(cosαi,sinαi),则与其正交的向量记作 bi=(-sinαi,cosαi)。Bi的长与宽分别为2ai1和2ai2(ai1,>ai2),记作ai=(ai1,ai2)。
根据以上定义,在平面上任意一个矩形的布局采用上述表达,记Bi=Bi(Qi,αi,ai)={Qi+μ1ai+μ2bi|,μk∈[-aik,aik]k=1,2}[12]对于Bi边界及内部的点都可以这样表示。因此第n 个进行布局预测的部件可以记为 Bi,i∈{1,2,…,n}。
2.1.2 中间约束层模型
为了上下层间合理进行布局,需要一个预估矩形来满足层与层、部件与部件之间的联系和约束,所以在布局过程中既要注意单层部件间的关系,同时也要注意各层布局之间的要求。
通过对角线找到最底层部件俯视图的重心位置Q1。找出一个预估矩形BD,根据重心位置Q1确定预估矩形的位置,然后依次输入预估矩形BD四个顶点的固定坐标即Dik=(xi,yi),xi,yi∈R,k=1,2,3,4,得到预估矩形。满足面积 S中=3S1/5,且预估矩形的重心与底层部件俯视图重心基本重合。

图2 部件分层式示意图Fig.2 Component Stratified Schematic Diagram
2.1.3 第二层部件模型
每一个部件的布局记作Fi=(xi,yi,αi),i∈{1,2,…,n}。即F=(f1,f2,…,fn)为每一层布局方案。所以在第一层布局完成后,需要中间约束层(预估矩形)内开始第二层布局。由于第二层中有三个部件参与布局。对这三个部件Bi=Bi(Qi,αi,ai),i∈{1,2,3},型心为四个顶点即Qi=Dik=(xi,yi),xi,yi∈R。i∈{1,2,3}。对其型心Qi的位置进行精确约束,使部件的布局范围约束在预估矩形内。第二层的三个部件在预估矩形内会找到一个最优外矩形包络,即完成第二层部件的布局。
2.2 布局中约束的建立
布局时主要存在的约束有形位约束、功能约束、运动约束、序列约束[13]。
2.2.1 形位约束
形位约束:包括形状约束和位置约束。形状约束指零部件和产品的形状。通常简化为几何图元来表示零部件。位置约束是指在布局的同时,对产品和零部件的位置和方向关系的描述。采用进行分层布局时,发现形位约束关系为干涉和相邻。
(1)干涉
平面上任意一个矩形图元都有确定的颜色,r 为红、g 为绿、b为蓝等。存在于矩形区域边界以及内部的点可表述为Bi,每个点所在区域都有自己的像素值。像素值一样的所有的点为intBi,记为:intBi=Bi(Ai,ai,ai)={Ai+μ1ai+μ2bi|μk∈[-aik,aik]k=1,2}。若所组成的图形存在交集,则各矩形间的重叠面积存在新的颜色区域,记点S(B)=[R G B]/255=s(Bi∩Bj),集合Ψ 所形成的面积S(Ψ)用于表示Bi与Bj两者之间的干涉面积,随着干涉程度变大,面积也跟着变大。S(Ψ)=S([R G B]/255)=s(Bi∩Bj)若使intBi∩intBj=ø(i≠j,i,j∈In+m)成立,满足该条件则说明两个矩形之间是不干涉的。
(2)相邻
某个矩形内部的点为Bi,另一矩形内的点为Bj,两矩形都有相应的颜色像素值。在RGB 颜色搭配中,两个不同颜色重合就会出现一种新的颜色,即干涉区域为目标区域内点的像素值s(B)=[R G B]/255=s(Bi∩Bj),反之目标区域的颜色s(B)=[R G B]/255=s(Bi)∪s(Bj),即为相邻。

图3 RGB 像素值原理图Fig.3 Schematic Diagram of RGB Pixel Value
矩形间的相邻度计算步骤如下:(1)输入点Bi为某矩形内的点,其像素值为s(Bi)=[R G B]/255;(2)判断目标区域内所有颜色的RGB 像素值,如果是否满足s(B)=[R G B]/255=s(Bi)∪s(Bj),如满足即为相邻。则终止。如果不满足则执行以下步骤;(3)计算Bi的像素值是否等于s(B)=[RGB]/255=s(Bi∩Bj),如果满足,即为干涉。
2.2.2 其他约束
(1)功能约束:产品最终要满足的用户对功能的要求,产品主要功能和附加功能的主次关系约束。开槽刀头为主要功能,其他部件所提供的都是服务开槽的附加功能。
(2)运动约束:反映产品工作时的传动方式、运动形式及驱动方式等信息。包括动力源供给各个部件提供动力,设备上运动部位(如导轨、履带)的运动信息等。
(3)序列约束:是在布局设计中,对零部件的组合和优先放置的顺序。
用树状图来展示其功能、运动、序列的约束关系,如图4 所示。
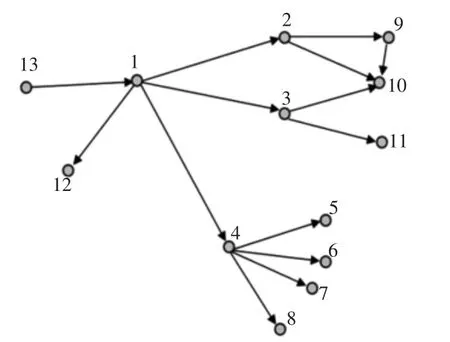
图4 部件关系树状图Fig.4 Component Relational Dendrims

表1 树状图所示部件及约束关系Tab.1 Components and Constraints Shown in the Dendrogram
由上表可以看出,其中序列约束有:1-2、1-3、1-4、1-12、13-1、2-9、2-10。运动约束有:2-9、4-(5、6、7、8)、9-10。功能约束有:1-3、1-12、2-10、3-10、3-11、9-10。
通过对开槽机做改进设计,增添了部分其他部件。但部件个数可数,产品结构简单,所以,可以用树状图表达设计约束。同时,参与布局的部件之间需要考虑到功能约束、运动约束、形位约束、序列约束,满足改进设计和布局优化的要求。因此,在布局设计中灵活配合使用约束要求中等复杂产品的升级改进具有指导意义。对往后较复杂设备的改进也提供了设计思路。
3 求解方法
3.1 分层布局求解过程
确定各个部件数学模型,完成每一层所属部件在所在层的布局,同时满足部件间和各层之间的约束关系。指导布局优化设计。具体操作流程,如图5 所示。

图5 开槽机改进设计流程图Fig.5 Improved Design Flow Chart for Slotting Machine
本设计按照由下到上的顺序,依次对产品或设备的内部部件进行分层,按照一定的约束条件和布局要求,对每一层的布局进行合理布局。又因为分层布局中,各层部件之间有一点的联系和约束,所以在布局过程中既要注意单层部件间的关系,同时也要满足各层布局之间的要求。
首先输入第一层各个部件的顶点坐标值(型心坐标值)、长宽以及转角αi。用遗传算法得到输出层为第一层的最小外包面积A(s)和理想的布局结果。
完成第一层部件布局后,为第二层部件布局找到预估矩形,通过预估矩形约束上下层间的关系。按照第一层的重心位置与预估矩形重心位置一致、外包矩形上小下大的方式求解得知预估矩形。此外考虑约束关系中的形位约束,应用RGB 三色法对部件间的相邻和干涉进行判别,还有其他约束关系:功能约束、运动约束和序列约束辅助布局。
最后输入第二层各个部件的顶点坐标值(型心坐标值)、长宽以及转角αi。同样采用遗传算法得到输出层为第二层的最小外包面积A(s)和理想的布局结果。得到第二层每个部件的位置坐标和合适的转角。
3.2 遗传算法求解
每一层布局过程即为进行多次采点,对满足要求的接近预想效果的布局方案,进行第二次采点。通过对二次采点后得到每个二维图元的顶点坐标值(型心坐标值)以及转角αi。输出层为总体的最小外包面积A(s)。然后应用遗传算法在当前所取的方案中,找到局部最优解。所用遗传算法,从旧群体中选择一定较优个体组成新的群体,以便产生下一代个体,个体适应度值越高的被容易被选中,采用轮盘赌注法进行选择,则个体i 被选择的概率为所求的都是每一层的面积最小值,即采用的方法是minf(x)=maxg(x)=max{-f(x)},其中函数g=-f。采用实数编码,在个体的第 k(1≤k≤n)个分量的定义区间[lk,uk]中均匀随机地取一个数v′k代替vk以得到z。也可以先确定一些较小的区间[-Ai,Ai],i=1,2,…,n。对 vk变异时均匀随机地在[-Ak,Ak]中取一个数 y 并令 v′k=vk+y。这里 Ak成为变异域,一般取区间[lk,uk]长度的某个百分比,这里取 Ak=0.1·(uk-lk)。
下一步完成两层的部件布局后,根据层与层之间、部件之间的约束,对其进行三维重构,验证其布局的合理性。
4 实例分析
开槽机是装修行业和建筑行业的主要使用设备,对开槽机进行升级设计。升级后的开槽机在现有基础上增加了(水箱、导轨、履带轮、液压杆、控制系统)等相关部件,使其成为中等难度产品,其各个部件在整机中的合理布局,就显得很重要。首先,产品及部件可简化成规则的几何体,然后按照一定的约束对各个开槽机各个部件进行整合。本实例通过分层布局的方法,将空间中多部件布局问题转化为层式二维布局问题。开槽机内部部件,如图6 所示。

图6 开槽机内部部件三视图Fig.6 The Three View of the Inner Parts of the Slotting Machine
首先确定各个部件数学模型,输入第一层各个部件的型心坐标值Qi以及转角αi。用遗传算法得到输出层为底部部件的布局结果。得到车底布局图后,可以初步得到整机的占地面积。同时,为下一步确定中间约束层提供了位置和面积的范围要求,如图7 所示。

图7 开槽机车底布局图Fig.7 Bottom Layout of Slotted Engine
经过对开槽机底部部件的布局,按照1:40 的比例,在软件中经过计算。可以求解得知目前最大的外包矩形面积:S=1.188×107,S1=S-2S0。
由于考虑到布局原则,为了满足稳定性和占地面积。因此,去掉上面两个空白较大的区域S0得到S1,用剩余最大矩形面积的作为下一层的布局范围,即为S预。
通过最底层部件俯视图的重心位置,在底层部件俯视图找出一个预估矩形,且满足面积,且预估矩形的重心与底层部件俯视图重心基本重合,如图8 所示。
在开槽机车身俯视投影图上,含有约束固定部件,如图8 所示。最底下部件位置基本固定,通过俯视图可以确定一个车身部件布局的范围,然后对俯视图固定部件进行合理估算。预先找的一个比较理想的预估矩形,脱离开槽机车底座往上到车身分层布局,满足稳定性和占地面积的要求,用于布局车身上面的内部部件。内部部件可在预估矩形里头进行布局,下图外包矩形就是车身各个部件可布局的范围。
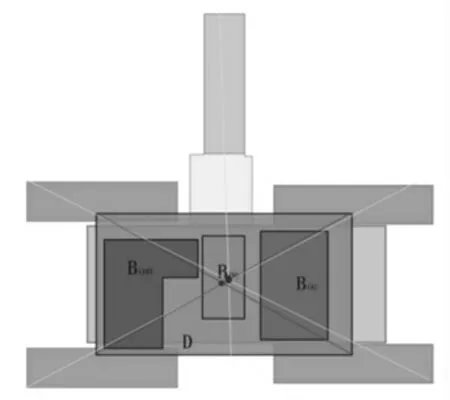
图8 开槽机车身部件预估矩形Fig.8 Slotting Machine Body Parts Estimate Rectangle
在完成第一层的部件布局后,开始对开槽机车身内部部件进行第二层布局。应用遗传算法的具体参数为:迭代次数1000、交叉随机数 b 取 0.7、变异概率 0.1、种群规模 10;变量就是部件图元的型心坐标和转角9 个变量,在MATLAB 中得到的第二层布局方案,如图9 所示。迭代过程,如图10 所示。
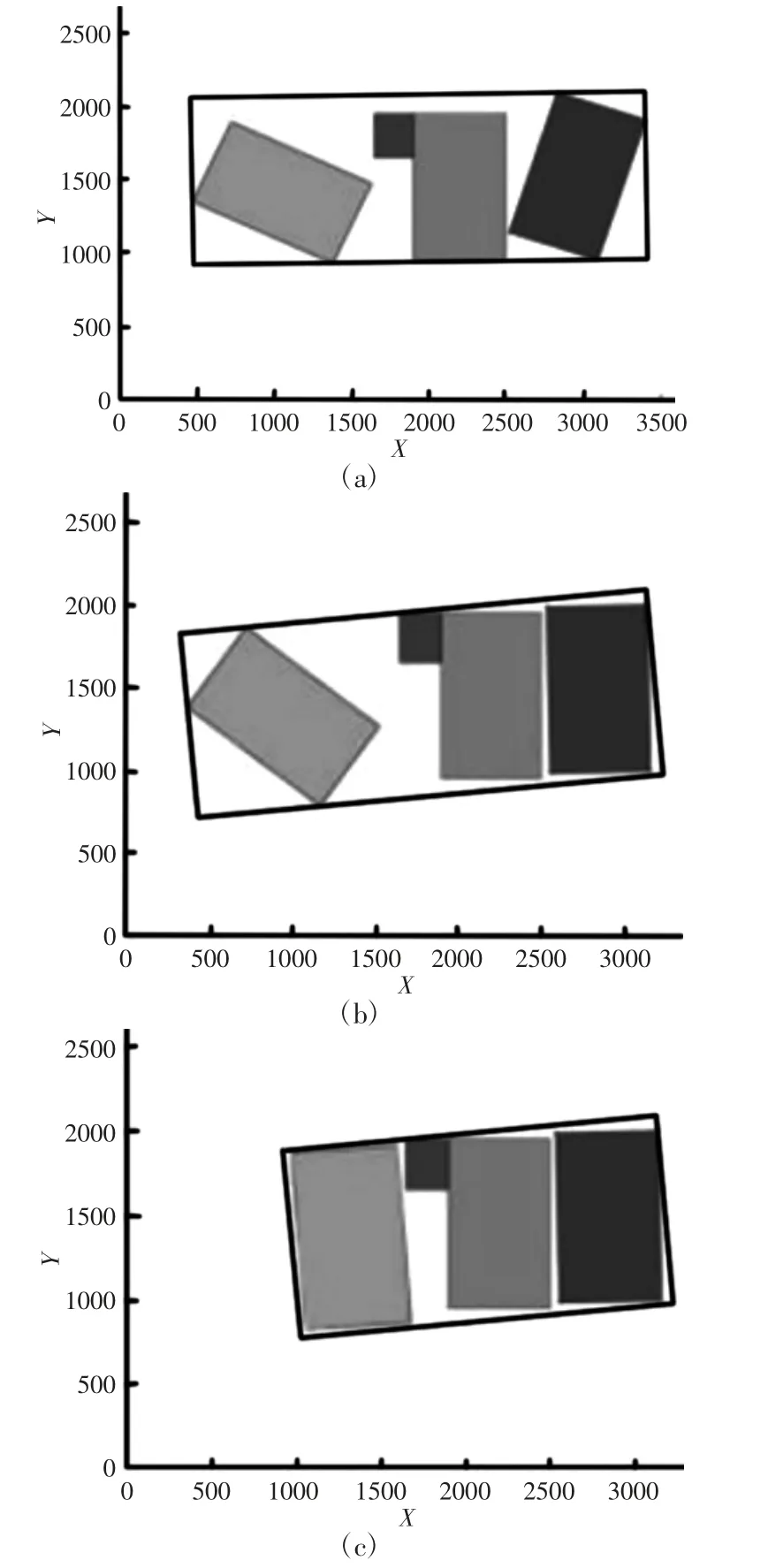
图9 MATLAB 中第二层部件布局图Fig.9 MATLAB Second Layer Component Layout

图10 迭代过程Fig.10 Iterative Process
经过分层布局,布局结果局,如表2 所示。
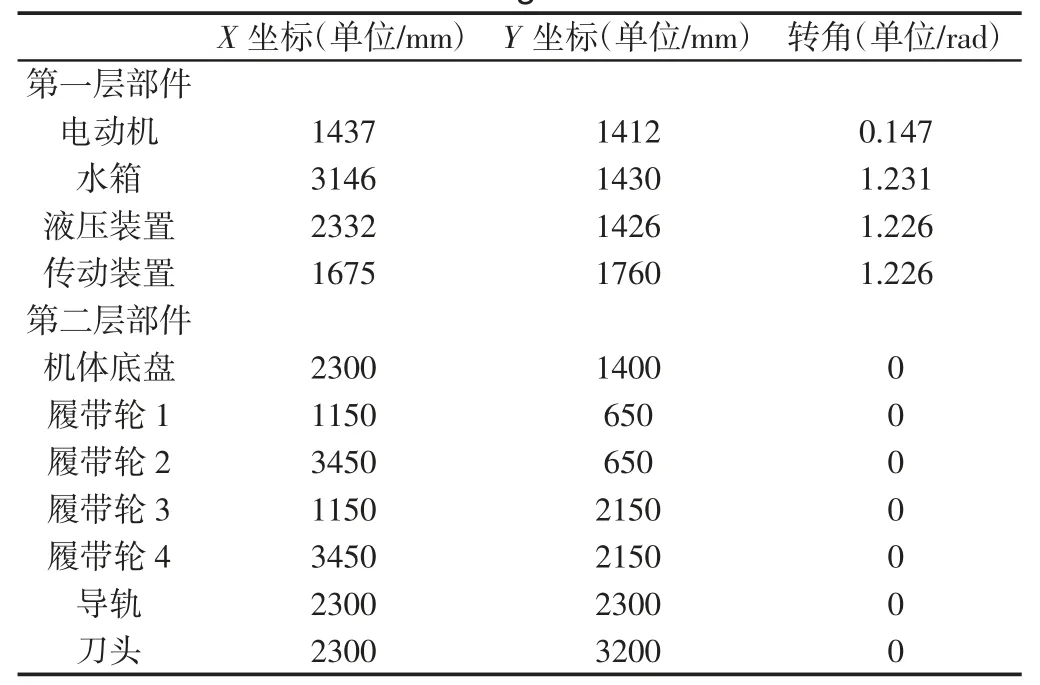
表2 所有矩形图元的型心坐标值及转角Tab.2 Centroid Coordinates and Angles of all Rectangle Primitives
最终所得第一层(底层)最优占地面积为0.445m2,第二层最优面积为 0.356m2。
本设计将这些设计约束与部件布局结合起来,经过以上步骤,可得到若干个二维矩形布局区域和若干个二维矩形功能区域,在三视图投影中,再对矩形模型进行数学描述。
在三维工程软件中,将二维布局的方案进行还原。把三视图中的一种视图或者多个视图导入三维建模软件,用二维布局中的位置和约束进行三维的分步建模。应用已经布局完成的分层布局方案逐层进行部件的绘制,依次进行部件的布局。
由以上升级改进后的开槽机三视图里,可以清晰的看出功能区对应的部件。部件的布局直接影响设备的体积、稳定性、工作效率。本实例是开槽机的改进设计。其改进结果,如图11 所示。

图11 部件布局三维展示图Fig.11 Component Layout Three Dimensional Display
5 结语
通过对开槽机内部部件布局设计,提出了结合布局约束条件的分层式布局方法,该方法也可用于内部部件较多且部件处于空间布局的机械产品。该方法在视图转化、应用约束条件分层、遗传算法求解等方面做了研究,并应用于开槽机内部部件间的布局中。以开槽机的改进设计为实例,对该设计方法进行了验证,将三维的部件投影二维简化,然后利用约束条件进行对部件分层,以每层外包矩形为优化目标,完成开槽机的内部各层布局方案。从而实现从内部结构到外部造型的设计连接,为后面开槽机的包装外形设计提供内部参考基础,可以实现产品内部结构和外部造型的衔接并行设计。该方法对提升产品内部结构设计有重要意义。