区分快慢变子系统的柔性机械臂控制方法
2021-01-27孙绍林
孙绍林
(贵州大学继续教育学院,贵州 贵阳 550025)
1 引言
相比于传统刚性机械臂,柔性机械臂因材质轻、高精度、高速度、低能耗等优势而应用广泛,但是柔性机械臂的长时间振动会影响系统定位精度,同时降低系统使用寿命,因此抑制甚至消除柔性机械臂振动意义重大。
柔性机械臂常用的控制方法包括PID 控制、模糊控制、最优控制、反演控制、变结构控制、鲁棒控制、能量法等。文献[1]使用改进PID 控制器抑制柔性机械臂末端振动,取得了一定效果;文献[2]使用遗传算法优化模糊控制,抑振效果明显优于传统模糊控制;文献[3]使用反演控制法控制焊接机器人,取得了满意效果;文献[4]用变结构控制与Haar 小波结合对工业机械臂位置进行控制,控制精度较高;文献[5]提出了改进和声搜索-遗传算法的鲁棒控制器,与其他鲁棒控制器相比,在超调量、调节时间上具有优势;文献[6]分别使用PID 法和能量法对末端振动进行控制,实验验证了能量法的准确性、可行性。当前对柔性机械臂跟踪精度、振动抑制要求越来越高,单一控制方法已难以满足要求。
使用奇异摄动法将柔性机械臂系统分解为快慢变两个子系统,使用反演滑模变结构设计慢变子系统控制器,使用模糊控制设计快变子系统控制器,而后将快慢变控制律组合得到最终控制律。
经仿真验证,与传统PID 控制相比,组合控制在转角误差、稳定时间、末端振动量、转角速度等多个方面优势明显。
2 柔性机械臂动力学建模
由于柔性机械臂粗长比极小,故机械臂梁模型选用Euler-Be-rnoulli 梁。柔性机械臂弹性变形描述准确性影响动力学模型准确性,鉴于假设模态法计算量小、效率高等优点,使用假设模态法描述柔性机械臂的弹性形变。
2.1 柔性机械臂弹性变形
单杆柔性机械臂示意图,如图1 所示。图中OX0Y0 为惯性坐标系,OX1Y1 为切线坐标系,机械臂一端连接驱动电机,另一端连接质量块m,u 为控制力矩,Jh为电机转动惯量,E 为弹性模量,I 为横截面对中性轴惯量矩,L 为机械臂长度,A 为横截面积,ρ 为材料密度,θ(t)为刚性转角,w(x,t)为点 P(横坐标为 x)在 t 时刻的横向弹性变形。

图1 单杆柔性机械臂模型Fig.1 Single Arm Flexible Manipulator Model
由假设模态法可知,机械臂横向弹性变形量w(x,t)为:

式中:n—模态数;Wi(x)—柔性机械臂固有振型函数;qi(t)—模态坐标。参考文献[7-8],系统弹性形变主要集中在前2 阶模态,故n=2。
2.2 柔性机械臂能量分析
柔性机械臂动能T 由两部分组成,分别为机械臂动能T1和质量块动能T2。机械臂自身动能T1为:

质量块动能T2为:

则柔性机械臂总动能T=T1+T2。
柔性机械臂运动方式为在水平面内做旋转运动,因此计算势能时不考虑重力势能,只考虑弹性势能,为:

2.3 柔性机械臂动力学模型
使用拉格朗日方程建立柔性机械臂动力学方程,拉格朗日方程描述为:

式中:L=T-U—拉格朗日函数;Q—广义力;z—广义坐标变量。将机械臂系统动能和势能代入式(2),解得动力学方程为:

式中:M—惯性矩阵;G—哥氏力和离心力矩的交叉耦合矩阵;K—刚度矩阵;u—机械臂控制力矩,p=[θ,q1,…,qn]T,F=[1,0,…,0]T。
3 系统组合控制原理
3.1 快慢变子系统分解方法
上节中提到,模态数n=2 较为合适,那么单杆柔性机械臂系统动力学方程可表达为:

由于惯性矩阵M 为正定矩阵,则其逆矩阵必然存在,记为H,则:
对式(4)左乘矩阵H,可得:

小参数μ 的存在使奇异摄动方程在快变量中显示边界层现象。将系统模型进行奇异分解[9],可以将快变子系统与慢变子系统分开。
令μ=0,由奇异摄动模型可以推导出慢变子系统动力学方程为:

其中下标s 表示此量为慢变量。

其中下标f 表示此量为快变量,用于描述柔性机械臂的弹性振动过程。

3.2 快慢变子系统组合控制原理
慢变子系统描述机械臂的刚性转动过程,快变子系统描述柔性机械臂的弹性振动过程。慢变子系统具有较强的非线性和参数不确定性,滑模变结构控制对参数变化或θ 扰动不敏感,具有很强的鲁棒性,但是存在抖振问题;反演控制能够很好解决滑模变结构抖振问题,因此将反演控制与滑模变结构控制相结合,提出了慢变子系统的反演滑模变结构控制。
快变子系统是非线性时变系统,难以实现较为精确的控制。模糊控制不需要精确数学模型,具有较强容错能力,特别适用于非线性、强耦合、时变、滞后系统,因此选择模糊控制用于快变子系统控制。则柔性机械臂组合控制原理,如图2 所示。

图2 柔性机械臂组合控制原理Fig.2 Composite Control Principle of Flexible Manipulator
4 快慢变子系统组合控制器设计
4.1 慢变子系统控制器
使用反演滑模变结构控制法设计慢变子系统控制器。为简化表达,将快变量下标 f 和慢变量下标 s 省略。记 x1=θ,x2=θ˙,那么式(6)可改写为:

记机械臂期望刚性转角为xd,要求xd具有二阶导数,则误差为定义虚拟控制量为,式中 c1>0
定义第一个Lyapunov 函数为V1=1/2e21,则:

定义切换函数σ=k1e1+e2,式中k1>0,将虚拟控制量代入切换函数,得:

易知式中 k1+c1>0,当滑模面 σ=0,则异号,则≤0,因此进行下一步设计。
定义第二个Lyapunov 函数为V2=V1+1/2σ2,则:


式中:h、β—常数,且 h>0、β>0;sgn()—符号函数。

4.2 快变子系统控制器
考虑到快变子系统模型不准确,而模糊控制能够弥补模型不准确的影响[10-11],所以设计了抑制振动的模糊控制器。
记机械臂末端振动误差值为e、误差变化率为ec,则模糊控制器输入量为e、ec,输出量为uf。
(1)精确量的模糊化。对于模糊控制,等级划分越细致则控制精度越高,但是计算量也会大大增加。模糊论域采用八段式,即将输入量和输出量变换到{NB,NM,NS,NZ,PZ,PS,PM,PB},分别代表负大、负中、负小、负零、正零、正小、正中、正大。确定振动误差范围 e∈[-0.15,0.15],单位为 rad,振动误差变化率范围 ec∈[-0.05,0.08],单位为 rad/s;控制力矩 uf∈[-10,10],单位为 Nm。将三个变量映射到模糊域[-6,6]中,易知量化因子为kc=40,kec=92.3,比例因子ku=1.67。输入量和输出量的三角形隶属度函数图,如图3 所示。
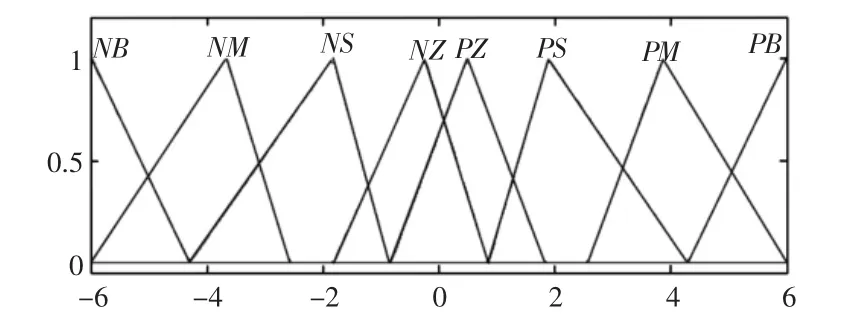
图3 三角形隶属度函数图Fig.3 Triangle Membership Function
(2)制定模糊规则。模糊控制器的输入量有两个,输出量有一个,每个量分为8 个等级,则需要制定64 条模糊规则。控制量的确定以减小振动为目标,即当振动误差较大时,以快速消除误差为主;当振动误差较小时,以控制系统超调量为主。根据这一原则,制定模糊规则,如表1 所示。

表1 模糊控制规则Tab.1 Fuzzy Control Rule
(3)去模糊化。目前常用的去模糊化方法有重心法、最大值法、加权平均法。重心法精度最高,但是计算最复杂;最大值法相对简单,但是误差较大;加权平均法兼顾两种方法优点,因此选用加权平均法进行去模糊化,方法为:

式中:z0—去模糊化后的值;zi—模糊值;μ(cz)i—zi的隶属度。则快变量的控制量为=ku·z0。
5 仿真验证及分析
ADAMS 用于机械系统运动学和动力学仿真,但是难以设计复杂控制器,而MATLAB 拥有足够的控制工具箱,故设计了ADAMS 与MATLAB 联合仿真的方法,联合仿真原理,如图4 所示。两软件之间每0.05s 进行一次数据交换。

图4 联合仿真原理Fig.4 Unite Simulation Principle
机械臂参数为:机械臂长度L=1200mm,截面宽度为4mm,面高度为60mm,弹性模量 E=2×1011N/m,材料密度 ρ=7.8×106kg/m3,末端质量块m=1kg。
使用阶跃响应验证组合控制对柔性机械臂的控制效果。柔性机械臂在水平面内转动,起始角度设为0,目标角度值设置为30°,仿真时间为 20s。
分别使用传统PID 控制器与组合控制器控制柔性机械臂,PID 控制技术已经成熟,在此不再赘述,使用极点配置法求解PID参数,分别为 KP=100,Ti=2,Td=10。组合控制中慢变子系统控制器参数为h=0.5,k1=0.3,c1=1.2。PID 控制器与组合控制器作用下的转动角,如图5 所示。
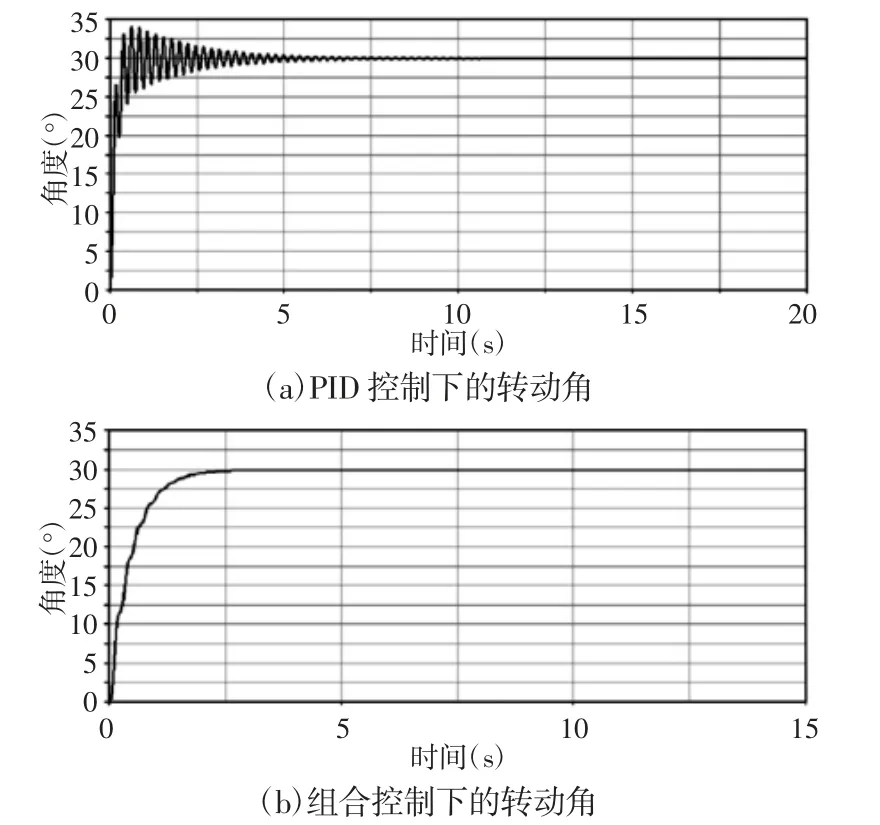
图5 两种控制器控制下的转动角Fig.5 Rotating Angle under the Two Controllers
两控制器控制下的转动角速度,如图6 所示。
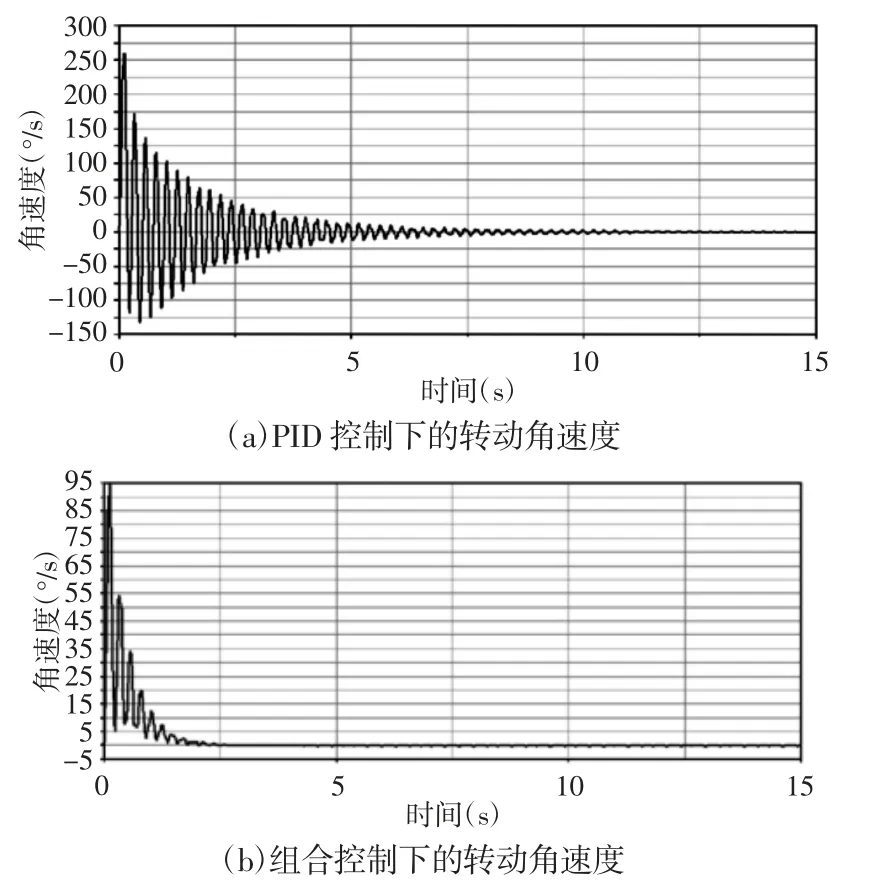
图6 两种控制器控制下的转动角速度Fig.6 Rotating Angle Speed under the Two Controllers
两控制器控制下的末端振动,如图7 所示。
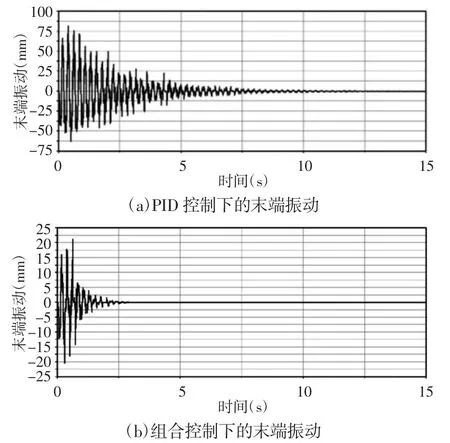
图7 两种控制器控制下的末端振动Fig.7 End Position Vibration Under the Two Controllers
两控制器控制下的控制力矩,如图8 所示。

图8 两种控制器控制下的控制力矩Fig.8 Control Moment Under the Two Controllers
为了更加精确地比较PID 控制器与组合控制器对柔性机械臂的控制效果,统计两控制器的性能参数,如表2 所示。

表2 两控制器控制效果对比Tab.2 Control Effect of the Two Controllers
从图5~图8 和表2 可以看出,与传统PID 控制器相比,在组合控制下,柔性机械臂振动明显减小,稳定时间明显变短,加速度最大值远远减小,末端振动幅值远远减小,力矩值远远减小,在节省能量同时,维护了系统稳定,可以极大地保护系统。
组合控制器在柔性机械臂控制中性能远远优于PID 控制,这是因为组合控制器针对快慢变子系统各自的特性,有针对性地分别设计了控制器,在减小柔性机械臂振动的同时,提高了控制精度。
6 结论
经过分析和仿真验证,可以得出以下结论:(1)奇异摄动法可以有效地将机械臂系统分解为快变子系统和慢变子系统,其中慢变子系统描述旋转过程,快变子系统描述振动过程;(2)反演滑模变结构可以精确控制机械臂慢变子系统的旋转过程,模糊控制器可以有效抑制机械臂快变子系统的振动过程;(3)与传统PID控制器相比,在组合控制器的控制下,柔性机械臂转动角误差下降了99%,稳定时间减少了75%,最大末端振动量减少了74.1%,充分证明了组合控制器在柔性机械臂控制中的有效性。