基于STM32的工业行车遥控器控制系统的开发
2021-01-25于韶东解品星孙兆斌孙雁鸣位吉宾
于韶东,解品星,孙兆斌,孙雁鸣,位吉宾
(上汽通用东岳汽车有限公司,山东 烟台 264006)
0 引 言
汽车厂冲压车间的行车具有吨位大、功能齐全以及运行强度大的特点。由于工作环境恶劣,因此与行车配备的遥控系统经常出现功能失效的问题。目前存在的主要问题是行车遥控器电路板的电路复杂,一般情况下失效的遥控器无法修复,而且更换新行车遥控器的价值昂贵。通过分析原理和系统功能,采用新型单片机系统,实现原行车遥控器的系统升级。
1 行车遥控器遥控发射系统原理
1.1 传统行车遥控器发射系统化原理分析
传统工业行车遥控器发射器原理如图1所示。
摇杆采用5K角度传感器,将摇杆的位置信号转换成电压信号。经过电压跟随器和AD转换器,将信号传递给单片机,再由单片机通过无线模块将位置命令发送出去[1]。为保证在电池电压降低的情况下能够正确识别摇杆命令,系统设计有基准电压电路和电池充电提醒电路。同时,发射装置能将急停信号、启动、停止、照明以及铃响等命令通过单片机传送至无线模块,实现无线命令的发送。

图1 传统工业行车遥控器发射器原理框图
1.2 新版行车遥控器发射系统电路分析
新版工业行车遥控器发射器原理如图2所示。

图2 新版工业行车遥控器发射器原理框图
新发射系统采用32位高性能STM32F103ZET6单片机作为CPU部件。STM32单片机是意法半导体公司出品的。芯片集成定时器Timer,CAN,ADC,SPI,I2C,USB以及UART等多种外设功能。此外,还具有EEPROM和高达512K的程序存储空间,最高72 MHz的工作频率,而且在存储器的0等待周期访问时可达 1.25DMips/MHz(DhrystONe2.1)[2]。程序运行速度的提升和内部存储空间的增加,保证原有功能更加完善的同时,简化了外围电路,并且可通过软件编程来替代繁杂的AD转换电路。从而大大提高了遥控装置的稳定性、可靠性以及环境适应性。
1.3 新版行车遥控器优点
STM32单片机集成了AD转换功能。新版遥控器电路更为简单,外围元器件减少,故障率降低,抗干扰能力增强,更能适应工业现场的恶略环境。同时提升了STM32单片机的内存和运算速度,增强了容错和纠错能力,使遥控发送的数据更为准确。此外,STM32单片机采用低功耗设计,使得整个电池系统稳定,待机时间长。
2 STM32F103ZET6实现摇杆位置的识别及传送
2.1 摇杆传感器原理
POL220-5K角度传感器原理如图3所示。

图3 POL220-5K角度传感器原理图
1#抽头为10 k滑动变阻器,2#抽头为滑动变阻器中点,将滑动变阻器分成两个5 k滑动电阻,3#抽头通过卡簧与滑动变阻器相连,5#和6#抽头为摇杆方向触点。根据传感器原理[3],设计电路原理如图4所示。
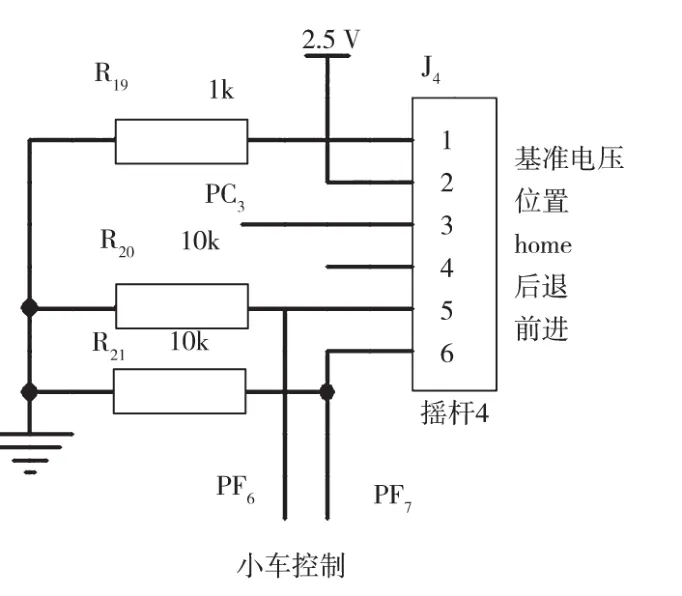
图4 POL220-5K角度传感器电路原理图
抽头2接基准电压,抽头1通过1 k电阻接地,可防止卡簧滑动到头时出现短路现象。摇杆摆动能够在抽头3处获得0~2.5 V电压。根据电压的大小,单片机可以判断出摇杆的位置。此外,抽头5和抽头6采用下拉方式接单片机IO口,单片机根据电平高低,判断出摇杆的方向。
2.2 C语言编程实现软件容错计算
C语言编程实现软件容错计算如下:

摇杆实现4速遥控,经过AD转换后,单片机能判断出电压值。由于机械磨损等误差,摇杆位置的电压会有所波动,单数值少于0.1 V时,单片机视为正常。当1档电压较低时,不通过电压判断,而是通过抽头5和抽头6来判断。电压值80~100 V为2档,电压值120~150 V为3档,电压值170~195 V为4档。最后发送给接收装置的数值仅为0、1、2、3、4。实现了电压值的滤波和容错。
2.3 C语言实现多点功能控制的数据打包传送
采用加权编码的方式可以通过无线串口发送方向和功能等位信号,具体如下:
SW=S1+2×S2+4×S3+8×S4+16×S5+32×S6+64×S7+128×S8;//方向
SW1=W1+2×W2+4×W3+8×W4+16×W5+32×W6+64×W7+128×W8;//功能
其中,S1和S2为摇杆1方向信号,S3和S4为摇杆2方向信号,S5和S6为摇杆3方向信号,S7和S8位摇杆4方向信号。W1为急停按钮,W2为启动按钮,W3为照明按钮,W4为停止按钮,W5为铃控制信号。
2.4 无线数据传送
无线数据传送程序如下:

3 无线传送/接收数据
3.1 GT-38 433MHz无线串口模块
GT-38 433MHz无线串口模块可以实现远距离无线传输,开阔地1200 m/FU4模式下,空中波特率为1 000 b/s。其工作频率范围为433~458.5 MHz,通信频道多达255个。发射功率最大可大100 MW(20 dB),可设置8档功率。此外,内置MCU,通过串口和外部设备进行通信,用户无需对模块另外编程,各种透传模式只管收发串口数据即可,使用方便。一次发送的字节个数多达256。
3.2 模块原理连接
GT38模块原理如图5所示。

图5 GT38模块原理图
左边的设备向模块发送串口数据。模块的RXD端口收到串口数据后,自动将数据以无线电波的方式发送到空中。右边的模块能自动接收数据,并从TXD还原出左边设备最初所发的串口数据。模块间只能工作在半双工状态,不能同时收发数据。模块可与供电系统为3.3 V或者5 V的MCU连接,串口需交叉连接。即模块的RX接MCU的TX,模块的TX接MCU的RX。
4 结 论
电子技术的发展,使得单片机的性能得到了日新月异的发展。一些早期进口自动化单片机设备的成本较高,电路设计复杂且抗干扰性能差,老化后稳定性较差。考虑采用市场主流单片机进行重新开发和替代,一般能够取得较好的效果。
