一种六轮机构通过梯形障碍物的振动分析
2021-01-22吴楠
吴楠
(爱驰汽车(上海)有限公司,上海201821)
0 引言
为了完善现有充电环境,我公司投资研发一种基于六轮机构移动平台[1]的充电机器人,机器人可在安装有减速带的停车场内自主移动[2-3],为用户提供充电服务。当移动平台驱动轮以一定速度通过减速带时,会对平台负载重心水平及竖直方向产生一定的加速度冲击[4-5]。当驱动轮速度较大时,平台负载可能因受到较大冲击而受到不必要的损害。本文根据该移动平台的机构原理和结构特点,建立了移动平台驱动轮通过梯形障碍物时的运动学方程[6-8],从而得到驱动轮水平速度与平台负载重心水平及竖直方向加速度的关系。根据机构特点及具体设计参数,通过MATLAB软件绘制移动平台以不同速度通过梯形障碍物(常用梯形减速带)时平台负载重心加速度变化曲线,发现负载重心加速度最大值均出现在驱动轮越过梯形障碍物上方棱角时,且其绝对值的最大值与驱动轮水平速度的平方成正比,由此可为设定该类移动平台通过减速带时的速度提供理论依据,同时也能作为选择相关梯形减速带的设置参考。
1 六轮移动平台基本结构
停车场内常常设置减速带,从而使汽车驾驶员主动减速,达到限速行驶的目的。但减速带的设置,也对充电机器人的正常行驶产生了影响。若机器人以较快速度通过减速带,产生的冲击可能会对有效负载造成损害,对各类负载刚度和强度提出较高要求。
本文讨论的六轮移动平台单侧基本结构如图1所示,属于一种六轮摇臂悬架[1]机构,前轮轴心O2与驱动轮轴心O1可绕某一转动轴转动,具有1个自由度,以此来提高平台对地面的适应能力和通过梯形障碍物的能力。前轮与后轮(后轮轴心O3)为被动轮,驱动轮分别由独立电动机驱动,利用差速原理[2]达到转向的目的。
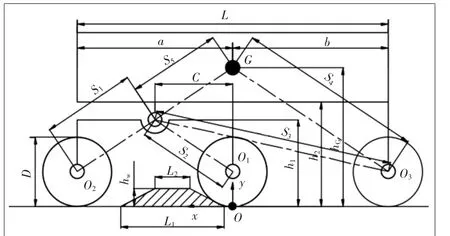
图1 六轮移动平台单侧基本结构
结合移动平台驱动轮通过梯形障碍物的实际情况及运动学理论分析的复杂程度,为了便于分析,现将分析做如下简化[3-4]:1)驱动轮在整个过程中水平速度不变;2)车轮与地面接触变形忽略不计,且车轮在整个过程中与地面或减速带保持接触;3)平台重心的变化受减速带的影响,忽略其他因素的影响。
2 六轮移动平台通过梯形障碍物的运动学分析
由于采用六轮摇臂悬架机构,移动平台驱动轮以一
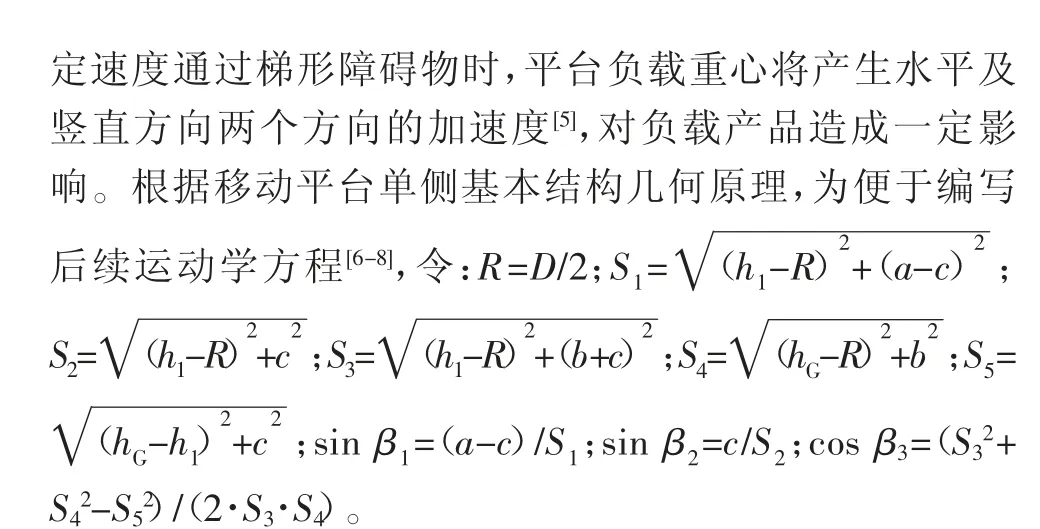
六轮移动平台驱动轮接触梯形障碍物时状态如图1所示。驱动轮沿梯形障碍物斜坡移动时状态如图2所示。
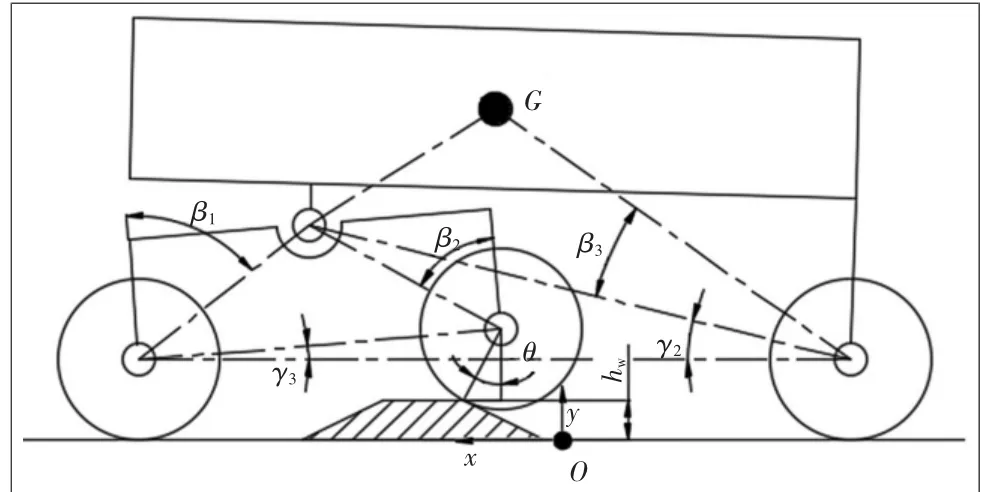
图2 驱动轮沿梯形障碍物斜坡移动
根据分析可得,驱动轮自接触梯形障碍物至离开障碍物可分为如下5个阶段:1)驱动轮开始离开水平面,沿斜面上行。2)驱动轮开始离开斜面,绕梯形障碍物上方棱角(此处定义为前棱角)转动,越过障碍物前棱角。3)驱动轮开始离开前棱角,沿障碍物上表面水平行驶。4)驱动轮开始离开障碍物上表面,绕梯形障碍物上方棱角(此处定义为后棱角)转动,越过障碍物后棱角。5)驱动轮开始离开后棱角,沿斜面下行直至接触水平面。


为得到一定条件下移动平台负载重心加速度曲线,本文将六轮机构参数L、a、b、c、h1、h2、hG、D分别设置为900、450、450、225、250、300、400、200 mm,梯形障碍物参数L1、L2、hw分别设置为300、100、50 mm,驱动轮水平速度分别设置为0.4、0.8、1.2、1.6、2 m/s。
将上述参数代入驱动轮自接触梯形障碍物至离开障碍物整个过程中的运动学方程中,利用MATLAB软件处理参数及方程并绘制加速度变化曲线,可得到整个过程中移动平台负载重心水平(x方向)加速度随时间变化的结果,如图3所示。
由图3可 以 看出,在第一阶段及第 五 阶段,平台负载重心加速度与驱动轮速度成线性关系;在第二阶段及第四阶段,平台负载重心加速度与驱动轮速度成抛物线关系;整个过程中重心加速度并非连续变化,在两个阶段交替时发生跳变。
同理可以得到整个过程中移动平台负载重心竖直(y方向)方向加速度随时间变化的结果,如图4所示。
由图3和图4可以看出,从驱动轮接触梯形障碍物至驱动轮离开障碍物的过程中,负载重心水平方向加速度与竖直方向加速度具有相似的变化过程,加速度峰值均出现在第一阶段的末期和第四阶段的末期。当加大驱动轮速度时,除第三阶段外,各个阶段的加速度均有所增大。整个过程中,负载重心竖直加速度均不小于水平方向加速度。
3 负载重心加速度与驱动轮水平速度关系解析
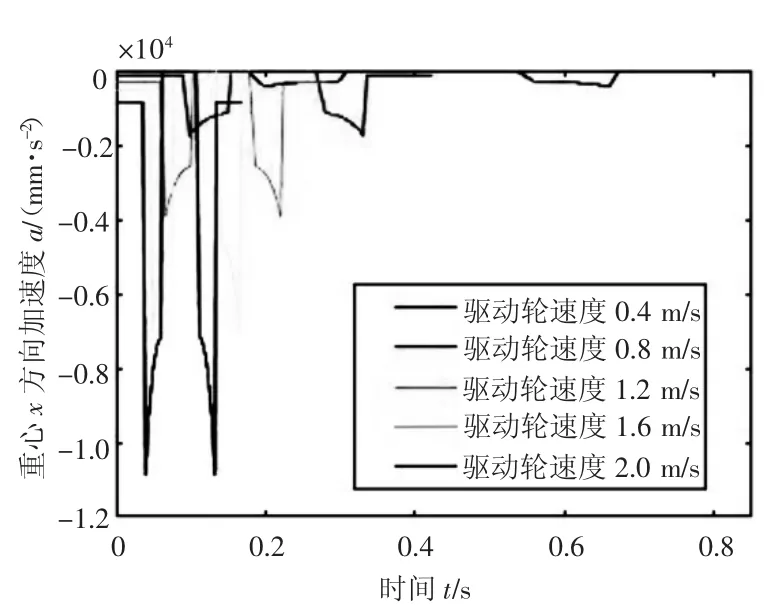
图3 负载重心x方向加速度曲线
综合图3及图4可以看出,当驱动轮速度线性增加时,负载重心两个方向的加速度的最大值并非线性增加,而是表现为一种抛物线式的增加趋势。
因此利用MATLAB 软件将不同速度下整个运动过程中负载重心水平及竖直方向加速度绝对值的最大值提取出来,绘制负载重心水平(x方向)及竖直(y方向)方向加速度绝对值的最大值与速度的平方的关系曲线,如图5所示。可以看出,从驱动轮接触梯形障碍物至驱动轮离开障碍物的过程中,负载重心加速度的绝对值的最大值与驱动轮水平速度的平方成线性关系。根据上述结果,若已知负载平台所能受到的加速度冲击上限,及一组水平速度和负载重心加速度数据,可较快得出移动平台通过梯形障碍物时的最大允许速度。同样,可以根据现有移动平台的参数设置及通过减速带时的速度设置,选择适合的梯形减速带。
4 结语
本文采用六轮悬架摇臂机构的移动平台,建立了在驱动轮自接触梯形障碍物至离开障碍物的整个过程中,平台负载重心、驱动轮轴心及后轮轴心的运动学方程,得到负载重心加速度与驱动轮速度的关系,从而为该类移动平台的运动分析提供理论参考。
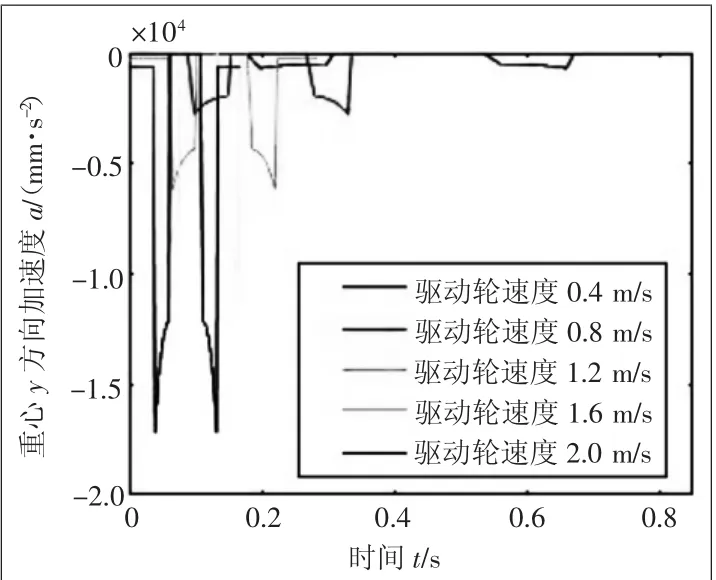
图4 负载重心y方向加速度曲线
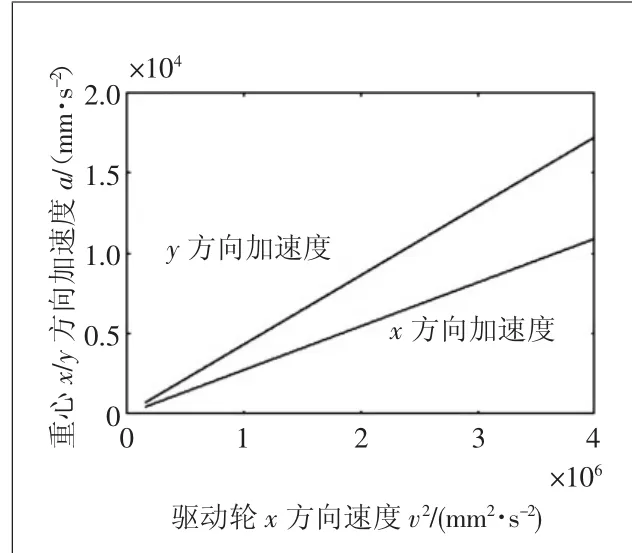
图5 负载重心水平方向加速度最大值变化曲线
根据实际采用的结构参数及一组线性变化的驱动轮速度设置,利用MATLAB软件处理相关参数和方程,绘制平台负载重心加速度与平台驱动轮移动速度间的关系曲线并得出结论:驱动轮速度越大,负载重心加速度越大,且重心加速度并非线性变化。
根据本文建立的移动平台驱动轮通过梯形障碍物时的运动学方程求解结果可以看出,在给定条件下,负载重心加速度的绝对值的最大值与驱动轮水平速度的平方成线性关系。利用分析方法和解析结果,可以从理论方面为设定机构通过减速带时的速度提供依据,从而保护负载,避免其因受到过大冲击而损坏。也可以根据平台参数选择合适的减速带以达到目的。下一步可引入悬挂系统的弹性系数和阻尼系数,分析同等条件下的负载加速度变化的特点。
