中心静脉穿刺机理研究
2021-01-16张永德代雪松张贯一姜金刚
张永德 代雪松 张贯一 姜金刚
摘要:穿刺力在不同的软组织内部表现的特征不同。进行穿刺针对软组织穿刺力模型的建立,可以对穿刺针在穿刺过程中的位置进行预判提供理论基础,提高穿刺精度,提高治疗效果。对中心静脉穿刺穿刺术进行分析,将穿刺过程分成4个阶段,并对每个阶段的力进行力学建模。搭建中心静脉穿刺试验平台,对穿刺过程中穿刺针力学模型进行验证,并对影响穿刺力大小的单因素进行了实验研究。实验结果表明随着穿刺角度的增大穿刺力也随之增大,随着穿刺针直径的变大,穿刺力也随之变大,穿刺速度的增大,穿对穿刺力影响较小。
关键词:中心静脉;穿刺;穿刺力模型
DOI:10.15938/j.jhust.2021.05.002
中图分类号:TH79;R318 文献标志码:A 文章编号:1007-2683(2021)05-0008-10
0 引言
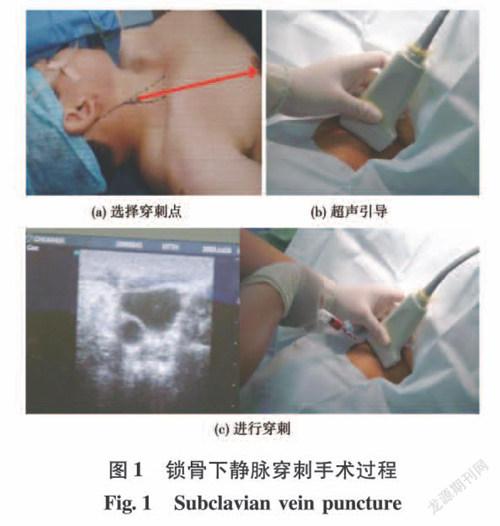
中心静脉穿刺置管是临床上用于急救复苏、危重患者以及手术监测和治疗时必不可少的方法[1]。锁骨下静脉穿刺置管因与周围组织结构比较固定、术后感染率低等优点在临床上已被广泛应用[2]。锁骨下中心静脉置管术是经锁骨下中心静脉将导管插入到上腔静脉[3]。在临床手术中医生仅能凭借经验进行穿刺,不能保证手术一次成功[4]:四川省攀枝花市中心医院对110例锁国下穿刺进行统计分析,一次成功55例(88%)[5]。并且锁骨下静脉解剖结构复杂,稍有不慎可发生气胸、血肿、动脉损伤等并发症[6]。通过研究血管组织的穿刺力模型及对穿刺参数的选择来提高穿刺成功率迫在眉睫。
国内外很多研究机构对穿刺力的模型建立和影响穿刺力的因素进行了大量的研究[7-12]。哈尔滨理工大学的张永德等[13]研究了振动、旋转对穿刺效果的影响,建立了穿刺前列腺时的穿刺力模型;天津大学的姜杉等[14]通过借用土力学的模型对肝脏穿刺力模型进行建模;很多学者也对影响穿刺力大小因素进行了研究,Kobayashi等[15]研究了穿刺力和穿刺角度的关系。Mahvash和Dupont[16]发现随着穿刺速度的增加穿刺力和组织变形随之减小。西南交通大学的李炜等[17]研究不同因素对针穿刺力的影响。Shergold和Flec[18]发现随着针直径的增加穿刺力也随之增加。大多数研究集中在穿刺针与软组织(如肝脏、前列腺等),而对静脉这种特殊组织的穿刺力模型研究有待完善。与其它软组织不同的是,静脉的穿刺力模型更加复杂,需要考虑到静脉压大小对穿刺力的影响。
本文对锁骨下中心静脉穿刺术进行分析,将穿刺过程分成不同阶段,并对各个阶段的穿刺力进行力学建模。搭建实验平台进行穿刺实验,对所建立的穿刺力模型进行验证,并对影响穿刺力大小的单因素进行了实验研究。
1 中心静脉穿刺力模型
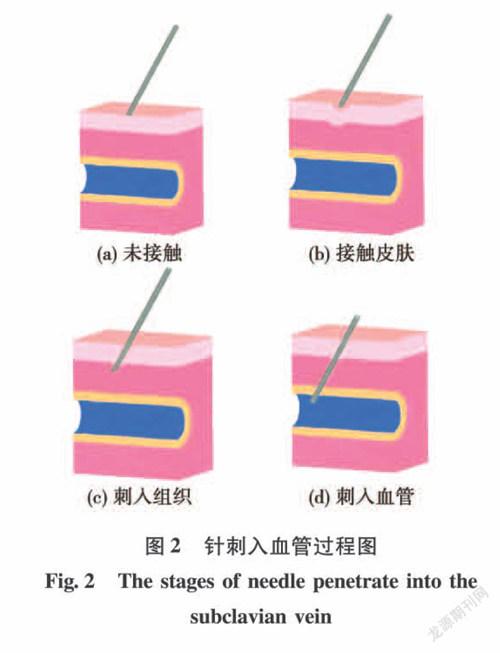
在中心静脉穿刺手术中,中心静脉穿刺过程分成如下4个阶段:
1)针未接触软组织。此阶段穿刺针与软组织未接触,如图2(a)所示。此时穿刺力0;
2)针与软组织接触。此阶段针与软组织相接触但尚未刺入到软组织中,如图2(b)所示。此时为接触问题,穿刺针所受力为接触力fstiffness;
3)针刺入软组织。此阶段到针尖触碰到血管组织表面为止,如图2(c)所示。此时穿刺针刺入组织,针受力为针尖的切割力fcutting和组织对针体的摩擦力ffriction;
4)针刺入血管内部。此阶段针突破血管外壁进入到血管腔内,如图2(d)所示。此时受力为血管穿刺力fvessel。
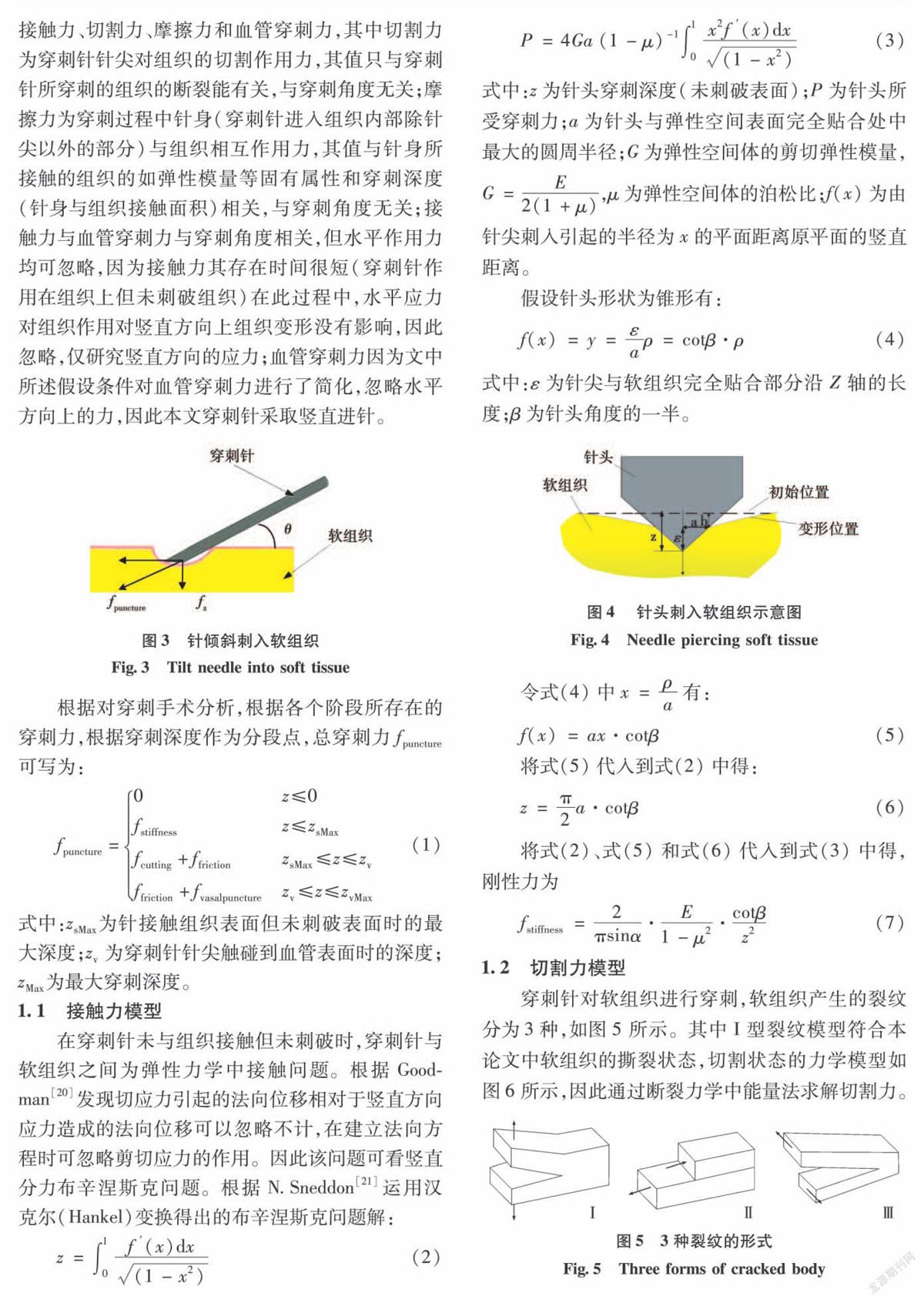
手术时,穿刺针与皮肤成一定角度,如图3所示。此时fpuncture=fz/cosθ,本文对穿刺力的建模分为接触力、切割力、摩擦力和血管穿刺力,其中切割力为穿刺针针尖对组织的切割作用力,其值只与穿刺针所穿刺的组织的断裂能有关,与穿刺角度无关;摩擦力为穿刺过程中针身(穿刺针进入组织内部除针尖以外的部分)与组织相互作用力,其值与针身所接触的组织的如弹性模量等固有属性和穿刺深度(针身与组织接触面积)相关,与穿刺角度无关;接触力与血管穿刺力与穿刺角度相关,但水平作用力均可忽略,因为接触力其存在时间很短(穿刺针作用在组织上但未刺破组织)在此过程中,水平应力对组织作用对竖直方向上组织变形没有影響,因此忽略,仅研究竖直方向的应力;血管穿刺力因为文中所述假设条件对血管穿刺力进行了简化,忽略水平方向上的力,因此本文穿刺针采取竖直进针。
根据对穿刺手术分析,根据各个阶段所存在的穿刺力,根据穿刺深度作为分段点,总穿刺力fpuncture可写为:式中:zsMax为针接触组织表面但未刺破表面时的最大深度;zv为穿刺针针尖触碰到血管表面时的深度;zMax为最大穿刺深度。
1.1 接触力模型
在穿刺针未与组织接触但未刺破时,穿刺针与软组织之间为弹性力学中接触问题。根据Good-man[20]发现切应力引起的法向位移相对于竖直方向应力造成的法向位移可以忽略不计,在建立法向方程时可忽略剪切应力的作用。因此该问题可看竖直分力布辛涅斯克问题。根据N.Sneddon[21]运用汉克尔(Hankel)变换得出的布辛涅斯克问题解:式中:z为针头穿刺深度(未刺破表面);P为针头所受穿刺力;a为针头与弹性空间表面完全贴合处中最大的圆周半径;G为弹性空间体的剪切弹性模量,针尖刺入引起的半径为x的平面距离原平面的竖直距离。
假设针头形状为锥形有:
1.2 切割力模型
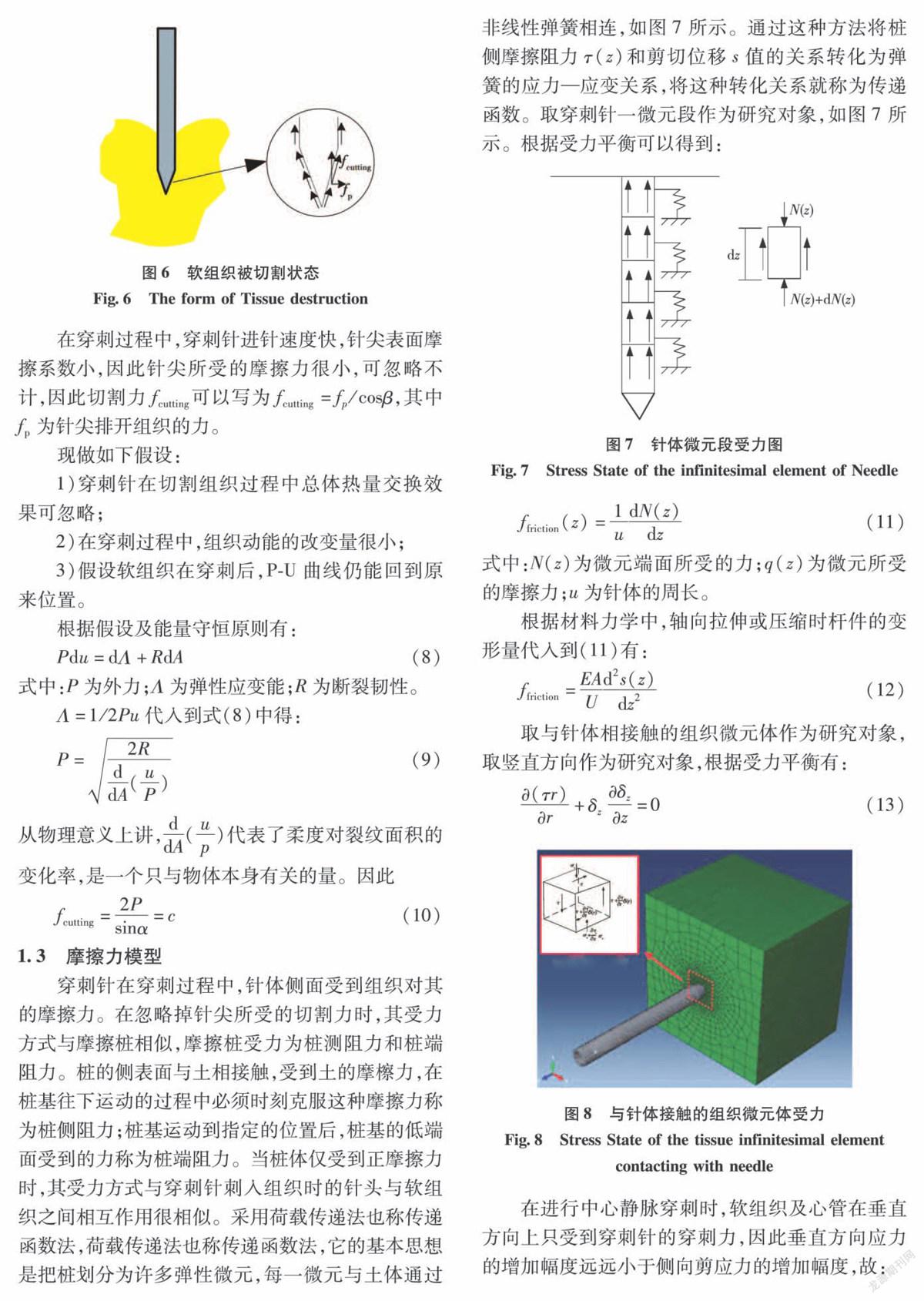
穿刺针对软组织进行穿刺,软组织产生的裂纹分为3种,如图5所示。其中Ⅰ型裂纹模型符合本论文中软组织的撕裂状态,切割状态的力学模型如图6所示,因此通过断裂力学中能量法求解切割力。
在穿刺过程中,穿刺针进针速度快,针尖表面摩擦系数小,因此针尖所受的摩擦力很小,可忽略不计,因此切割力fcutting可以写为fcutting=fp/cosβ,其中fp为针尖排开组织的力。
现做如下假设:
1)穿刺针在切割组织过程中总体热量交换效果可忽略;
2)在穿刺过程中,组织动能的改变量很小;
3)假设软组织在穿刺后,P-U曲线仍能回到原来位置。
根据假设及能量守恒原则有:
1.3 摩擦力模型
穿刺针在穿刺过程中,针体侧面受到组织对其的摩擦力。在忽略掉针尖所受的切割力时,其受力方式与摩擦桩相似,摩擦桩受力为桩测阻力和桩端阻力。桩的侧表面与土相接触,受到土的摩擦力,在桩基往下运动的过程中必须时刻克服这种摩擦力称为桩侧阻力;桩基运动到指定的位置后,桩基的低端面受到的力称为桩端阻力。当桩体仅受到正摩擦力时,其受力方式与穿刺针刺入组织时的针头与软组织之间相互作用很相似。采用荷载传递法也称传递函数法,荷载传递法也称传递函数法,它的基本思想是把桩划分为许多弹性微元,每一微元与土体通过非线性弹簧相连,如图7所示。通过这种方法将桩侧摩擦阻力τ(z)和剪切位移s值的关系转化为弹簧的应力一应变关系,将这种转化关系就称为传递函数。取穿刺针一微元段作为研究对象,如图7所示。根据受力平衡可以得到:
在进行中心静脉穿刺时,软组织及心管在垂直方向上只受到穿刺针的穿刺力,因此垂直方向应力的增加幅度远远小于侧向剪应力的增加幅度,故:
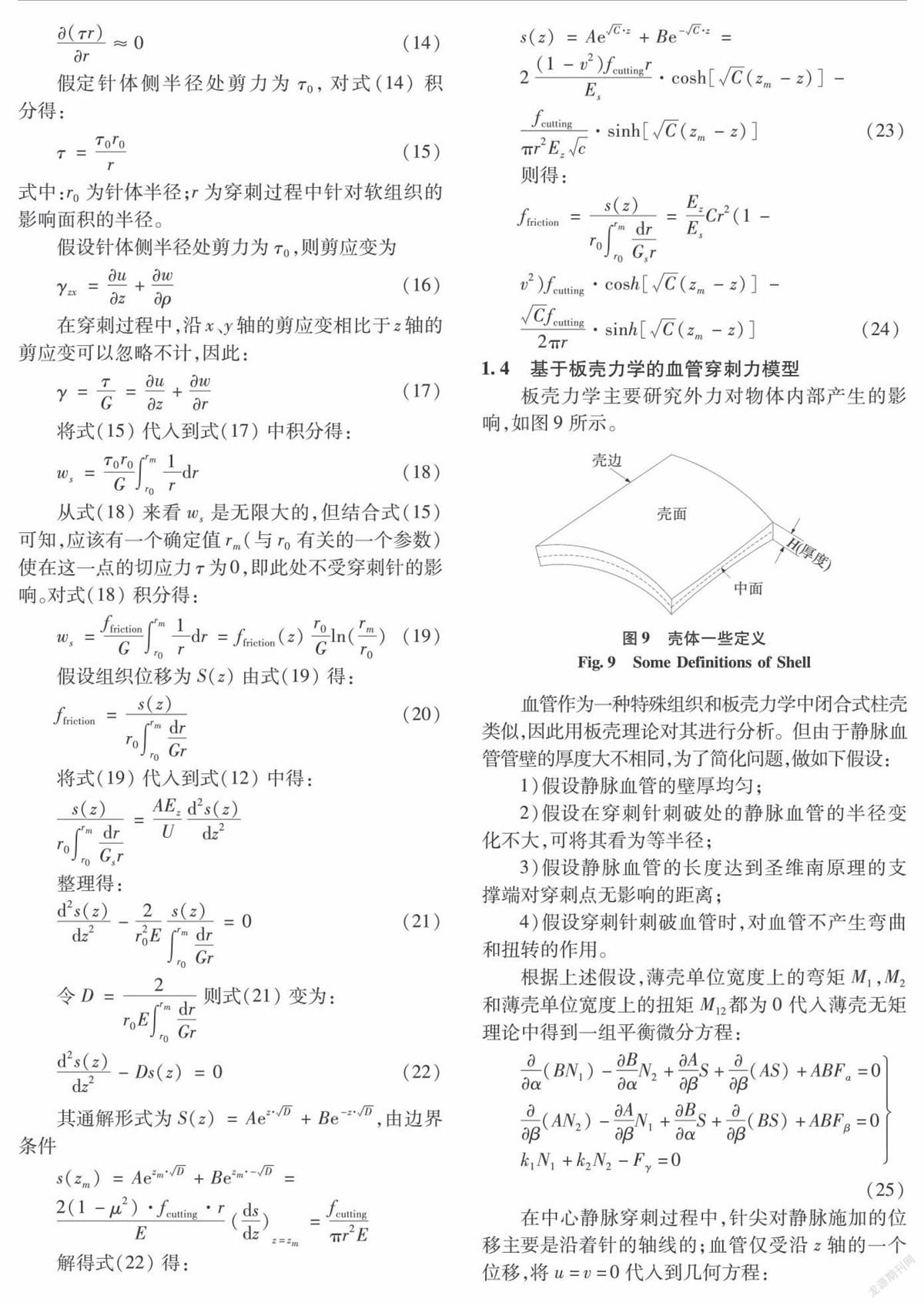
1.4 基于板壳力学的血管穿刺力模型
板壳力学主要研究外力对物体内部产生的影响,如图9所示。
血管作为一种特殊组织和板壳力学中闭合式柱壳类似,因此用板壳理论对其进行分析。但由于静脉血管管壁的厚度大不相同,为了简化问题,做如下假设:
1)假设静脉血管的壁厚均匀;
2)假设在穿刺针刺破处的静脉血管的半径变化不大,可将其看为等半径;
3)假设静脉血管的长度达到圣维南原理的支撑端对穿刺点无影响的距离;
4)假设穿刺针刺破血管时,对血管不产生弯曲和扭转的作用。
根据上述假设,薄壳单位宽度上的弯矩M1,M2和薄壳单位宽度上的扭矩M12都为0代入薄壳无矩理论中得到一组平衡微分方程:
在中心静脉穿刺过程中,针尖对静脉施加的位移主要是沿着针的轴线的;血管仅受沿z轴的一个位移,将u=v=0代入到几何方程:
2 中心静脉穿刺力实验
本文搭建了穿刺实验平台,进行穿刺力实验并采集实验数据。用猪心血管作为穿刺对象,进行穿刺实验。
2.1 穿刺力实验平台搭建
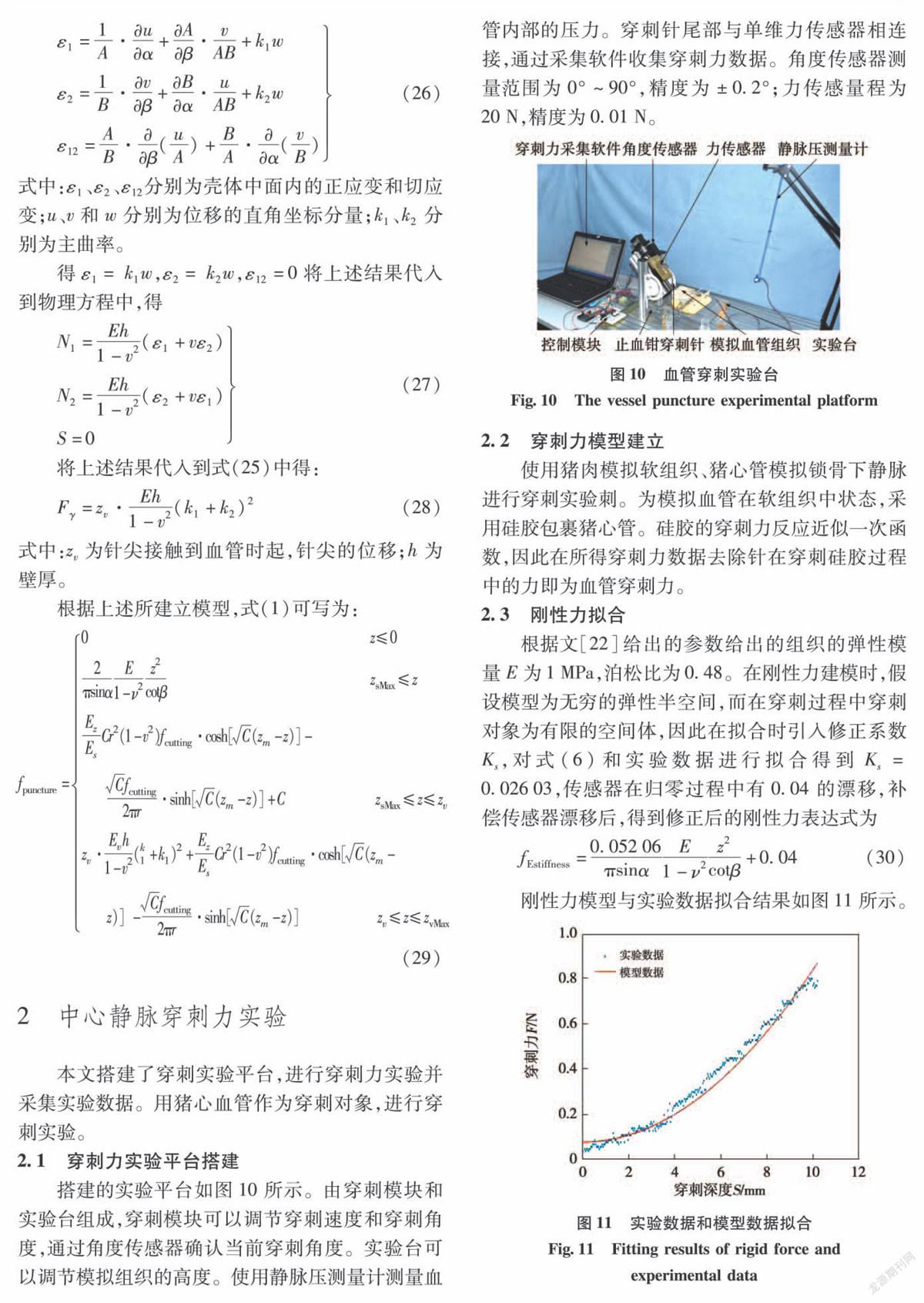
搭建的实验平台如图10所示。由穿刺模块和实验台组成,穿刺模块可以调节穿刺速度和穿刺角度,通过角度传感器确认当前穿刺角度。实验台可以调节模拟组织的高度。使用静脉压测量计测量血管内部的压力。穿刺针尾部与单维力传感器相连接,通过采集软件收集穿刺力数据。角度传感器测量范围为0°~90°,精度为±0.2°;力传感量程为20N,精度为0.01N。
2.2 穿刺力模型建立
使用猪肉模拟软组织、猪心管模拟锁骨下静脉进行穿刺实验刺。为模拟血管在软组织中状态,采用硅胶包裹猪心管。硅胶的穿刺力反应近似一次函数,因此在所得穿刺力数据去除针在穿刺硅胶过程中的力即为血管穿刺力。
2.3 刚性力拟合
根据文[22]给出的参数给出的组织的弹性模量E为1MPa,泊松比为0.48。在刚性力建模时,假设模型为无穷的弹性半空间,而在穿刺过程中穿刺对象为有限的空间体,因此在拟合时引入修正系数Ks,对式(6)和实验数据进行拟合得到Ks=0.02603,传感器在归零过程中有0.04的漂移,补偿传感器漂移后,得到修正后的刚性力表达式为
刚性力模型与实验数据拟合结果如图11所示。
2.4 切割力与摩擦力拟合
穿刺针刺入组织阶段的穿刺力主要为切割力和摩擦力的混合,现有装置无法单独测量两种力的大小。目前有两种方式获取摩擦力:对同一位置进行重复试验;将退针过程中稳定的力作为摩擦力。第一种方法排除对切割力对穿刺力的影响,但在实际穿刺过程中由于重力的作用,很难保证对同一位置穿刺时不触碰到其他组织,所以采用第二种方法获取摩擦力。
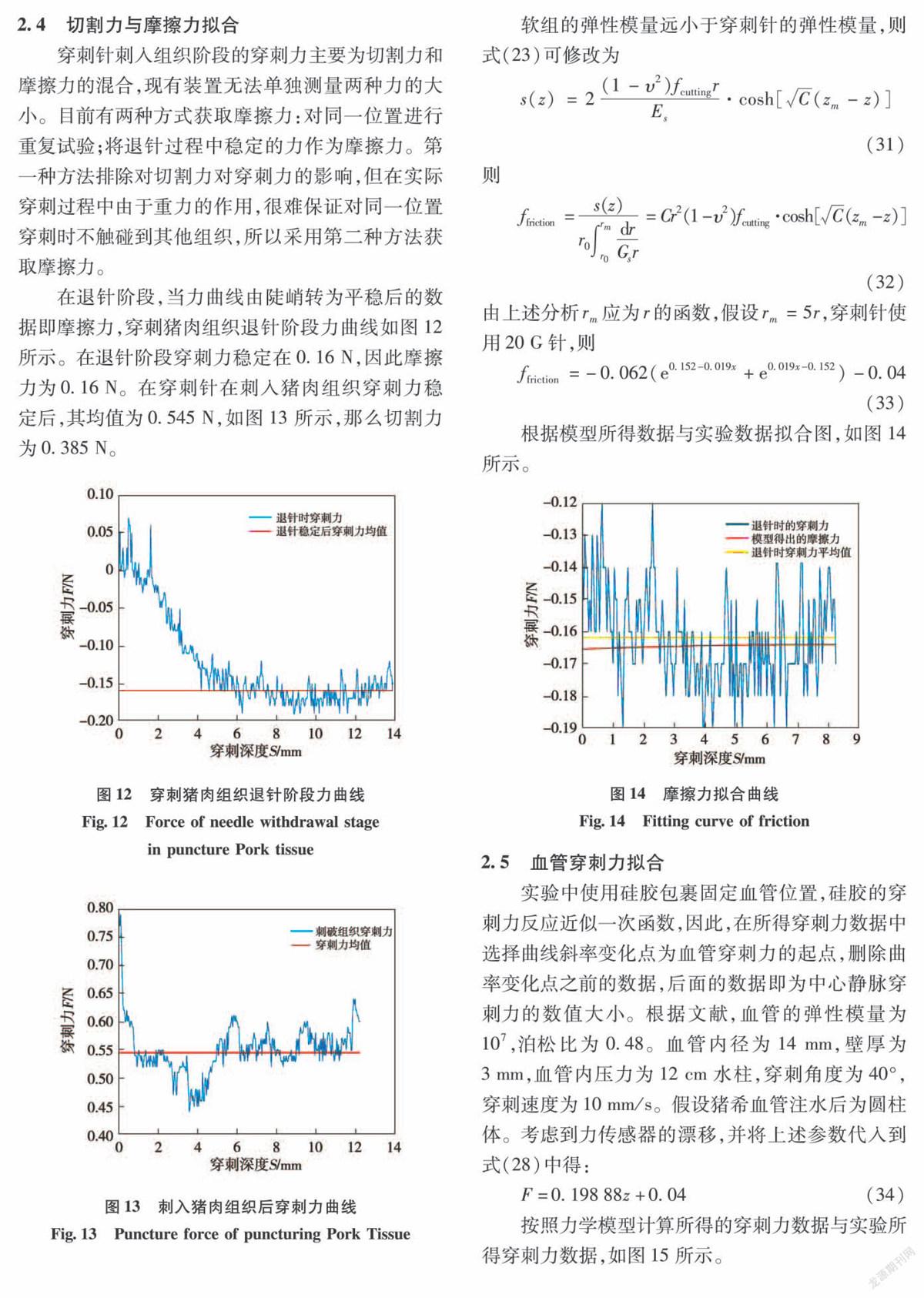
在退针阶段,当力曲线由陡峭转为平稳后的数据即摩擦力,穿刺豬肉组织退针阶段力曲线如图12所示。在退针阶段穿刺力稳定在0.16N,因此摩擦力为0.16N。在穿刺针在刺入猪肉组织穿刺力稳定后,其均值为0.545N,如图13所示,那么切割力为0.385N。
软组的弹性模量远小于穿刺针的弹性模量,则式(23)可修改为
根据模型所得数据与实验数据拟合图,如图14所示。
2.5 血管穿刺力拟合
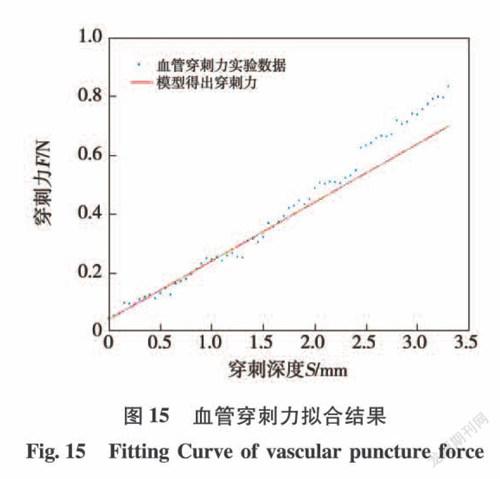
实验中使用硅胶包裹固定血管位置,硅胶的穿刺力反应近似一次函数,因此,在所得穿刺力数据中选择曲线斜率变化点为血管穿刺力的起点,删除曲率变化点之前的数据,后面的数据即为中心静脉穿刺力的数值大小。根据文献,血管的弹性模量为107,泊松比为0.48。血管内径为14mm,壁厚为3mm,血管内压力为12cm水柱,穿刺角度为40°,穿刺速度为10mm/s。假设猪希血管注水后为圆柱体。考虑到力传感器的漂移,并将上述参数代入到式(28)中得:
F=0.19888z+0.04(34)
按照力学模型计算所得的穿刺力数据与实验所得穿刺力数据,如图15所示。
3 影响穿刺力因素
使用硅胶模拟软组织,猪血管模拟锁骨下静脉,分别探究穿刺角度、穿刺针直径、穿刺速度对血管穿刺力的影响。
3.1 穿刺角度对穿刺力影响
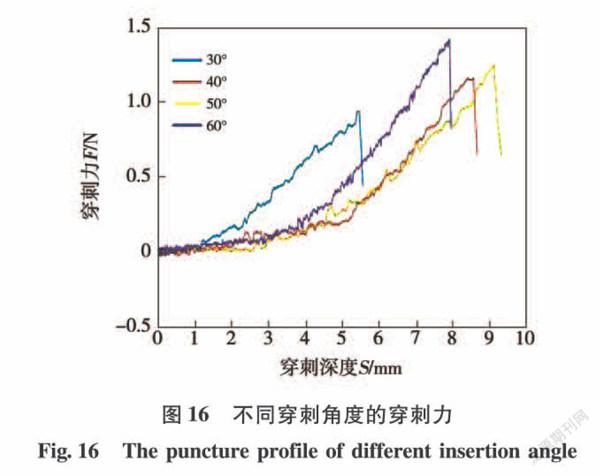
在锁骨下静脉穿刺术临床手术中穿刺角度一般选在30°~60°。为探究穿刺角度对穿刺力影响,采用20G针、10mm/s的穿刺速度,模拟静脉压为12cm,对血管中心轴线进行穿刺。分别采集穿刺角度为30°、40°、50°、60°时的穿刺力,获得到的穿刺力数据如图16所示。
穿刺力随着穿刺角度的升高而升高,但当穿刺角度为40°和50°时的穿刺力相差不大。这是因为当穿刺角度比较小的时候,针尖斜面贴合血管,整个针尖和切削刃全部对血管壁作用,此时相当于穿刺针切人到血管腔内;当穿刺角度较大时,针尖斜面与血管壁作用面积小,此时相当于穿刺针刺入血管,并且此时血管变形导致血管内压大也是导致穿刺力偏大的因素之一。
3.2 穿刺针直径对穿刺力影响
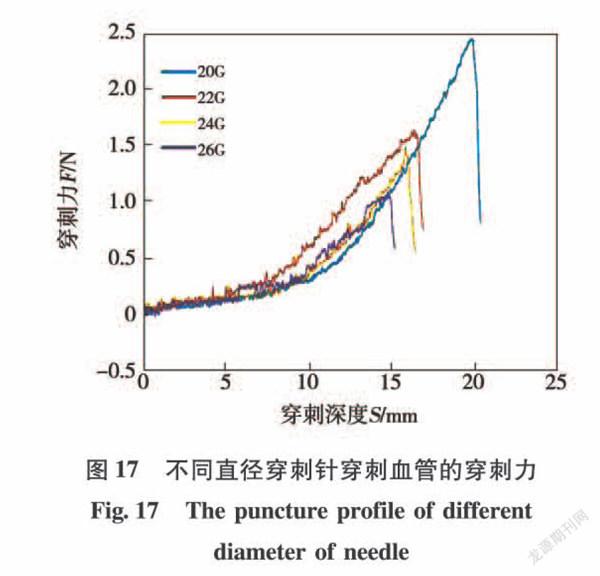
为研究穿刺针直径对穿刺力的影响,本文选取了4种临床常用的穿刺针(20G、22G、24G、26G),对同一块血管模拟组织的不同位置进行穿刺,穿刺角度45°,穿刺速度8mm/s,压力12cm水柱,穿刺位置为血管的中心,4次穿刺获取的穿刺力数据如图17所示。
从图中的曲线可以发现,穿刺力随着穿刺针的直径变小而变小,经分析主要由以下两个原因造成此现象:第一,当穿刺速度和穿刺角度不变的情况下,穿刺针直径变小随之对组织造成的伤害也就减小,所需要能量也随着减小;第二,穿刺针直径变小,导致穿刺针与组织接触面积变小。以上两点因素导致了摩擦力的减小。
3.3 穿刺针的穿刺速度对穿刺力影响
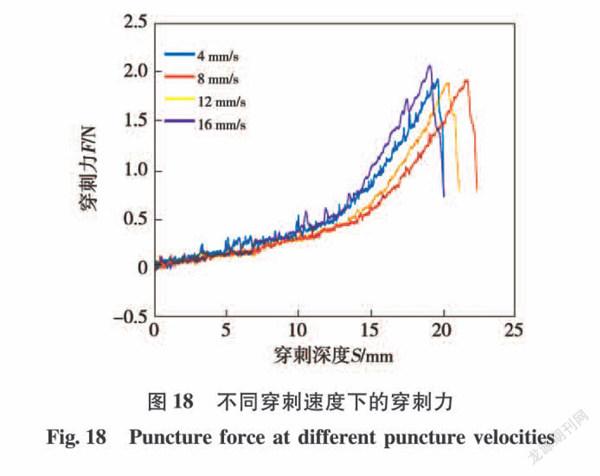
在进行中心静脉穿刺时,穿刺针的能量大小取决于穿刺速度。穿刺速度会影响穿刺力的大小,同时穿刺速度的快慢也影响患者的疼痛感引起患者的不适。因此,需要研究穿刺速度与穿刺力之间的关系。本文选用20G针,穿刺角度为45°,静脉压为12cm,血管内径为12mm,正中心刺入血管,采集穿刺力数据如图18所示。在上述穿刺参数下,穿刺速度为4mm/s、8mm/s、12mm/s时,三者的穿刺力差别很小。但当穿刺速度为16mm/s时,穿刺力提高了10%。4者在穿刺到模拟软组织时,穿刺大小相等;在接触到血管组织时,穿刺力上升的斜率才有变化,这可能是由于速度的快慢会导致血管变形,从而影响穿刺力的大小。
4 结论
本文主要对中心静脉穿刺力进行建模,并搭建实验平台对影响穿刺力大小的因素进行了实验研究。本文将中心静脉穿刺分为4个阶段,并对各个阶段的穿刺分力建立力学模型。穿刺力模型显示穿刺力均与穿刺深度有关,并且穿刺力在不同组织间的穿刺力各不相同(穿刺力模型不连续)。因此,穿刺针在穿刺到不同组织时穿刺力会有“阶跃”现象(穿刺力突然改变),尤其在穿刺针再刺入到血管腔内时,穿刺力会突然变小。因此,在观察到穿刺力曲线有“阶跃”现象时,即可判断穿刺针在组织中的大致位置。搭建了穿刺力实验平台,使用猪心血管代替锁骨下静脉、硅胶代替软组织,进行穿刺实验。通过实验对所建立的穿刺力模型进行了验证。同时对影响穿刺力的单因素进行分析,实验结果表明:穿刺角度越大穿刺力也越大;随着穿刺针直径的变大,穿刺力也随之变大;穿刺速度增大,对穿刺力影响较小。本文研究中将穿刺过程看为准静态过程,因此血液流动对穿刺力的影响有待研究。
参考文献:
[1]黄海宁.经锁骨上入路行锁骨下静脉穿刺置管的临床应用[J].医学理论与实践,2018,31(13):2005.
[2]王敏欢,何敏,谢红.超声引导下腋一锁骨下静脉穿刺的临床效果[J].临床麻醉学杂志,2018,34(4):356.
[3]冀永峰,刘慧,颜鹏.锁骨下静脉置管术在基层医院的临床价值[J].临床医学研究与实践12017,2(28):63.
[4]王凤丽.锁骨下静脉穿刺置管术在肿瘤化疗中的应用及护理体会[J].中国冶金工业医学杂志,2015,32(3):328.
[5]余水,刘云兴.颈内、锁骨下静脉穿刺中心静脉置管术在急诊患者中的应用[J].现代中西医结合杂志,2012,21 (10):1090.
[6]MARIANTINA,FRAGOU A,GRAVVANIS V,et al.Real-timeUltrasound-guided Subclavian Vein Cannulation Versus the Land-mark Method in Critica 1 Care Patients:A Prospective RandomizedStudy[J].Critical Care Medicine,2011,39(7):1607.
[7]SIMONE C,OKAMURAAM.Modeling of Needle Insertion Forcesfor Robot-assisted Percutaneous Therapy[C]//Robotics and Auto-mation,2002.Proceedings.ICRA'02.IEEE International Confer-ence on.IEEE,2002:2085.
[8]CARRA A,AVILA-VILCHIS J C.Needle Insertion ModelingThrough Several tissue Layer[C]//Informatics in Control,Auto-mation and Robotics(CAR),2010 2nd International Asia Con-ference on.IEEE,2010:237.
[9]孫银山,吴冬梅,杜志江,等.基于肝脏力模型的机器人辅助进针策略[J].机器人,2011,33(1):66.
[10]胡中伟,张璧.生物软组织切割过程建模[J].中国机械工程,2011,22(17).2043.
[11]郭普莘,高德东,李丽荣.针穿刺软组织实验与穿刺力力学建模[J].青海大学学报(自然科学),2014,32(3);37.
[12]杜海艳,张永德,赵燕江,等.斜尖针穿刺软组织建模及针尖轨迹预测[J].仪器仪表学报,2015,36(8):1744.
[13]张永德,张为玺,梁艺,等.前列腺高精度穿刺机理及策略研究[J].仪器仪表学报,2017,38(6):1405.
[14]JLANG S,LI P,YU Y,et al.Experimental Study of Needle-tissueInteraction Forces:Effect of Needle Geometries,Insertion Methodsand Tissue Characteristics[J].Journal of Biomechanies,2014,47(13):3344.
[15]KOBAYASHI Y,HAMANO R,WATANABE H,et al.Use ofPuncture Force Measurement to Investigate the Conditions of BloodVessel Needle Insertion[J].Medical Engineering&Physics,2013,35(5):684.
[16]MAHyASH M,DUPONT P E.Fast Needle Insertion to MinimizeTissue Deformation and Damage[C]// IEEE International Confer-ence on Robotics&Automation.IEEE Int Conf Robot Autom,2009;3097.
[17]BAO X,LI W,LU M,et al.Experiment Study on Puncture ForceBetween MIS Suture Needle and Soft tissue[J].Biosurface&Bio-tribology,2016,2(2);49.
[18]SHERGOLD O A,FLECK N A.Experimental Investigation Intothe Deep Penetration of Soft Solids by Sharp and Blunt Punches,with Application to the Piercing of Skin[J].Journal of Biome-chanical Engineering,2005,127(5):838.
[19]王允祥,呂凤霞,陆兆新.杯伞发酵培养基的响应曲面法优化研究[J].南京农业大学学报,2004(3):89.
[20]GOODMAN L E.Contact Stress Analysis of Normally LoadedRough Spheres[J].Journal of Applied Mechanics,1962,29(9):515.
[21]SNEDDON L N.The Relation Between Load and Penetration inthe Axisymmetric Boussinesq Problem for a Punch of Arbitrary Pro-file[J].International Journal of Engineering Science,1965,3(1):47.
[22]CHEN A I,BALTER M L,MAGUIRE T J,et al.Real-time Nee-dle Steering in Response to Rolling Vein Deformation by a 9-DOFImage-guided Autonomous Venipuncture Robot[C]//IEEE/RSJInternational Conference on Intelligent Robots&Systems.Rep US,2015:2633.
(编辑:温泽宇)
收稿日期:2020-04-07
基金项目:国家自然科学基金(51675142).
作者简介:代雪松(1992-),男,博士研究生;
张贯一(1991—),男,硕士研究生.
通信作者:张永德(1965—),男,博士,教授,博士研究生导师,E-mail:zhangyd@hrbust.edu.cn.
