一种煤矿智能掘进系统
2021-01-10林军杰
林军杰

摘要:本文介绍了一种基于惯导+数字式全站仪实现精确定位的煤矿智能掘进机器人系统,该系统包括横轴式掘进机器人、临时支护机器人、钻锚机器人、锚网运输机器人、电液控平台、通风除尘系统及运输系统,解决了复杂地质条件下智能掘进的难题,提高了掘进效率,保障了安全生产。
关键词:掘进,锚网,支护
1.项目背景:
我国虽然煤炭资源蕴藏丰富,但适用于露天开采的煤田极少,比美国、加拿大、俄罗斯的煤田复杂的多,地下井工开采是煤矿开采的主要方式。复杂地质条件下的快速智能掘进始终是个难题,同时,掘进装备的自动化智能程度已成为制约煤矿提高生产能力的主要因素。面临这种独特的开采条件,集中力量研制一种全新的智能掘进机器人系统,就显得尤为迫切。
2.设备介绍:
该智能掘进机器人系统基于惯导+数字式全站仪实现精确定位,包括依次布置于煤矿巷道内的横轴式掘进机器人、临时支护机器人、钻锚机器人、锚网运输机器人、电液控平台、通风除尘系统及运输系统。横轴式掘进机器人位于临时支护机器人的框架内,位于整个系统的最前方,利用临时支护机器人一推一拉向前移动;钻锚机器人、锚网运输机器人和电液控平台通过铰接与临时支护机器人串联在一起,通过前方牵引前后移动,通过铰接两侧的液压缸微调左右位置;钻锚机器人用于完成锚网永久支护的钻锚任务,钻锚机器人上安装两排钻机,可以一次性完成永久支护,所有钻机均可选装90°,前后微调,实现所有顶部和侧帮的支护,利用钻锚机器人上搭载的传感器和液压伺服系统实现人工辅助的自动打钻及自动上锚网;锚网运输机器人通过机械手机构、传感器及液压伺服系统实现自动给钻锚机器人上网和给第一锚网库补网;临时支护机器人包括临时支护机器人Ⅰ和临时支护机器人Ⅱ,用于实现对围岩的及时支护和对机器人系统的自动拖动,具有超前钻探、修帮、自动纠偏功能;运输系统包括刮板运输机、落地皮带式转载机、主运皮带,掘进机器人开采的煤通过刮板运输机传输到落地式转载机上,落地式转载机再将煤转载到主运皮带上,将煤运出;临时支护机器人Ⅰ与刮板运输机铰接并带动其向前移动,临时支护机器人Ⅱ与落地式转载机铰接并带动其向前移动;通风除尘系统通过外部管道将新鲜空气送到前端,直达临时支护机器人内部,右侧定制的矩形管道为送新风管道,为工作人员提供新鲜空气,右侧方形管道为除尘口,通过负压将煤尘带走;运输系统通过迈步式自移机尾拖动带式输送机向前移动,与煤岩运输系统保持同步。如下图。
1.横轴掘进机器人2.临时支护机器人3.钻锚机器人4.锚网运输机器人5.电液控平台6.除尘系统7.运输系统
2.1横轴式掘进机器人
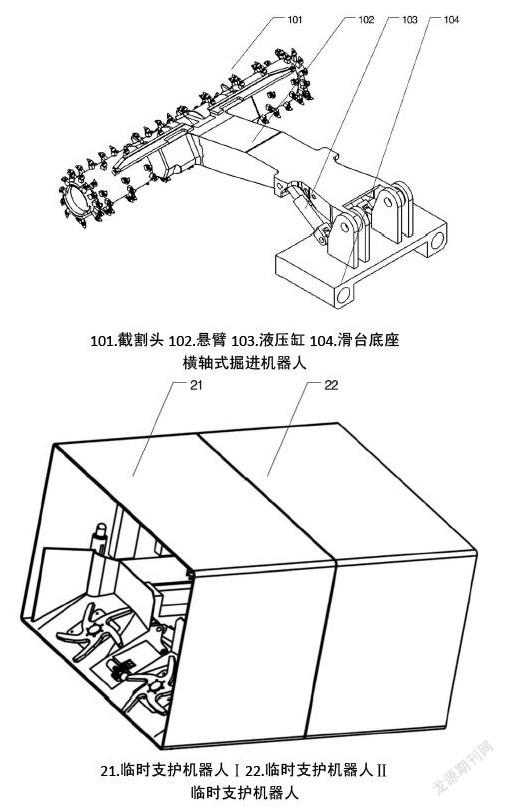
横轴式掘进机器人包括横轴截割头、悬臂、一对液压缸和滑台底座。横轴截割头用于实现高效率截割,其内部液压马达伺服系统能实时反馈转速和液压压力;一对液压缸用于为悬臂提供上下摆动的动力,液压缸上有位移传感器,实时反馈悬臂位置;滑台底座与临时支护机器人Ⅰ底部通过轨道连接,并且通过滑台底座可以带动整个横轴式掘进机器人前后移动。见下图。
临时支护机器人Ⅰ和临时支护机器人Ⅱ通过前拉后推牵引系统前进。见下图。
2.2钻锚机器人
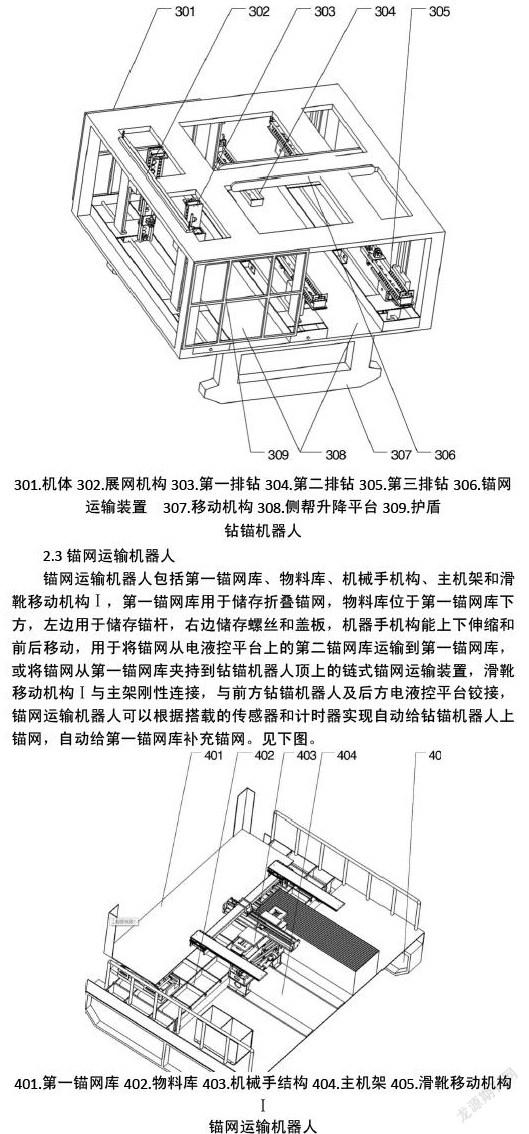
钻锚机器人包括机体、展网机构、第一排钻、第二排钻、第三排钻、锚网运输装置、移动机构、侧帮升降工作平台和护盾,机体与临时支护机器人Ⅱ铰接,通过两侧的液压缸微调位置;护盾和展网机构用于将到达预定位置的折叠网打开,第一排钻,第二排钻和第三排钻上布置的钻机能左右和上下移动,且可以绕旋转中心90°旋转,所有锚杆钻机具有角度微调功能,范围为±5°,利用钻机上布置的传感器在人工装上锚杆后可以实现一键打钻和一键锚固功能,所有锚杆钻机
101.截割头102.悬臂103.液压缸104.滑台底座
横轴式掘进机器人
21.临时支护机器人Ⅰ22.临时支护机器人Ⅱ
临时支护机器人
具有独立控制功能,顶部锚杆钻机有污水收集功能;锚网运输装置安装在机体顶部,与后面的锚网运输机器人顶部平行,通过旋转传送装置将锚网从锚网运输机器人顶部运输至机体前端预定位置,移动机构前端与临时支护机器人铰接;侧帮升降工作平台能根据作业人员需要升降。见下图。
301.机体302.展网机构303.第一排钻304.第二排钻305.第三排钻306.锚网运输装置 307.移动机构308.侧帮升降平台309.护盾
钻锚机器人
2.3锚网运输机器人
锚网运输机器人包括第一锚网库、物料库、机械手机构、主机架和滑靴移动机构Ⅰ,第一锚网库用于储存折叠锚网,物料库位于第一锚网库下方,左边用于储存锚杆,右边储存螺丝和盖板,机器手机构能上下伸缩和前后移动,用于将锚网从电液控平台上的第二锚网库运输到第一锚网库,或将锚网从第一锚网库夹持到钻锚机器人顶上的链式锚网运输装置,滑靴移动机构Ⅰ与主架刚性连接,与前方钻锚机器人及后方电液控平台铰接,锚网运输机器人可以根据搭载的传感器和计时器实现自动给钻锚机器人上锚网,自动给第一锚网库补充锚网。见下图。
401.第一锚网库402.物料库403.机械手结构404.主机架405.滑靴移动机构Ⅰ
锚网运输机器人
2.4电液控平台
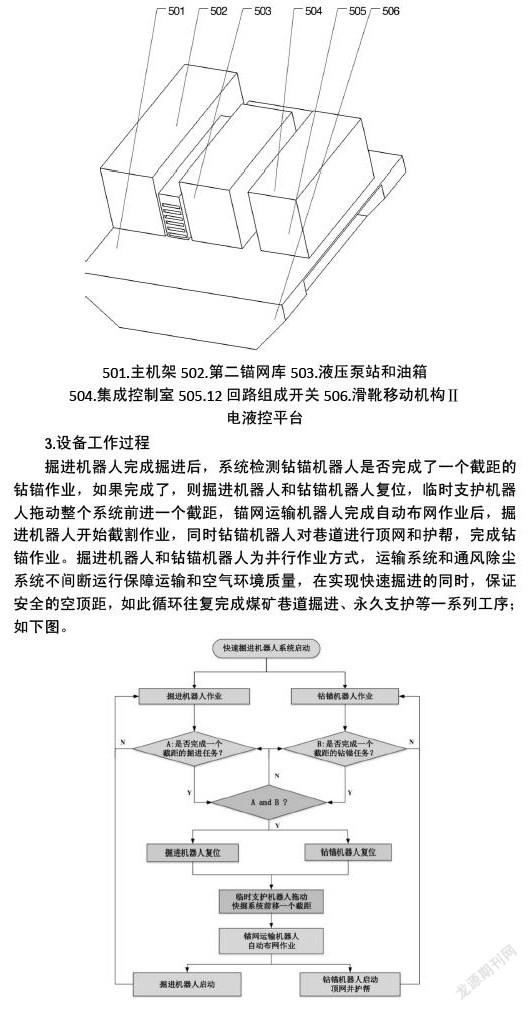
电液控平台包括主机架、第二锚网库、液压泵站和油箱、集成控制室、12回路组成开关及滑靴移动机构Ⅱ,第二锚网库用于储存第一锚网库储存不下的锚网,液压泵站和油箱提供整个系统的液压动力,集成控制室集成了整个系统的控制和监控单元,监控并协同各个子系统工作,12回路组成开关负责接通系统的电液管路,且有清水进水管接口,以备钻锚机器人,掘进机器人的用水,滑靴移动机构与锚网机器人铰接,通过两侧的液压缸微调相对位置。见下图。
501.主机架502.第二锚网库503.液压泵站和油箱
504.集成控制室505.12回路组成开关506.滑靴移动机构Ⅱ
电液控平台
3.设备工作过程
掘进机器人完成掘进后,系统检测钻锚机器人是否完成了一个截距的钻锚作业,如果完成了,则掘进机器人和钻锚机器人复位,临时支护机器人拖动整个系統前进一个截距,锚网运输机器人完成自动布网作业后,掘进机器人开始截割作业,同时钻锚机器人对巷道进行顶网和护帮,完成钻锚作业。掘进机器人和钻锚机器人为并行作业方式,运输系统和通风除尘系统不间断运行保障运输和空气环境质量,在实现快速掘进的同时,保证安全的空顶距,如此循环往复完成煤矿巷道掘进、永久支护等一系列工序;如下图。
在掘进机器人自动完成一个截距的掘进任务后,系统进入移动状态,状态灯闪烁,提醒工人进入安全位置,临时支护机器人通过前拉后推使系统前进,掘进机器人开始下一截距的掘进任务,钻锚机器人开始所在位置的锚网支护,钻锚进行下一个锚网支护前,锚网运输机器人将第一锚网库的折叠锚网运到钻锚机器人的链式锚网运输机上,锚网运输机器人通过自带的计数器计算第一锚网库内存储的锚网数量,在锚网数量为零时,发动该信号至机械手,自动从电液控平台上的第二锚网库上给第一锚网库补网,电液控平台的集成控制室负责整个系统的状态监视和各个子系统的协同和监视,并同步数据到井上监控室,在换班时,由下一个班组的工人和后勤工人通过矿井运输装置,补充锚网和其他物料,下班后完成基本检测和系统废料箱更换,在完成固定进尺或班次后设检修班,进行系统检修,确保系统稳定运行。
结语
煤矿智能掘进机器人系统能解决复杂地质条件智能掘进难题、提高了掘进效率、保障了安全生产,引领掘进技术革命,对于打造智能煤矿、构建智慧矿区具有里程碑式的重大意义和深远影响。
作者简介:
(1981.03——,男,汉族,陕西合阳人,工程师,大学本科,煤矿机电设备管理研究)
