焊接机器人在轨道交通装备制造中的应用
2020-11-20刘宁
刘宁
摘要:伴随着我国轨道交通建设步伐的加快,对轨道交通装备制造的要求也越来越高。焊接机器人凭借其自动化、智能化和柔性化等特点,在轨道交通装备制造中发挥了重要作用。因此文章重点就焊接机器人在轨道交通装备制造中的应用展开相关探讨。
关键词:焊接机器人;轨道交通;装备制造;应用
焊接机器人这一系统具有综合性和复杂性,为良好应用焊接机器人,应该将应用对象选择好,将工艺准备和工装结构设计工作做好,保证上道工序产品生产管理以及质量可以满足焊接机器人开展工作的要求。并在长时间的使用中积累更多经验,从而在制造轨道交通装备过程中将焊接机器人作用充分发挥出来。
1焊接机器人技术
1.1 焊缝跟踪技术
在焊接机器人中焊缝跟踪技术十分重要,在焊接过程中,使用焊接跟踪技术智能化诊断焊接过程,以此结合实际焊接状况调整焊接路径和焊接参数,将焊接质量提高。这一焊接技术主要是以悍接机器人布置的传感器为基础,通过传感器对焊接过程进行检测,并运用控制理论方法,对焊接路线会产生的偏移值进行计算,进而向控制中心及时传送数据,对焊接机器人焊接的路径加以控制。现阶段神经网络技术和模糊数字技术有着较为广泛的应用,这能够在一定程度上提高这一技术的智能化程度,目前我国开始推广使用系统化焊接机器人的焊接跟踪系统。
1.2 离线编程和规划路径技术
离线编程和规划路径技术是通过控制器编程来设定控制焊接机器人的程序,此外按照焊接任务实际内容与质量要求等参数有效编程焊接路径。编程焊接路径过程中应该重视焊接轨迹以及温度等,从而全自动化控制焊接过程。现阶段离线编程和规划路径技术较为成熟,通过编程可以达到焊接机器人自动化焊接这一目的,也可以确保焊接质量一致性。但是因为焊接机器人存在较为复杂的焊接路径,无法达成全自动编程。
1.3 多机器人协调控制技术
在焊接机器人实际应用过程中,因为焊接目标通常有较大的体积,所以大多数情况下需要使用多个焊接机器人共同作业。基于这一情况,应该使用多機器人的协调控制技术来协调多个机器人工作路径和工作面。现阶段工业生产中出现了越来越多的焊接目标大型化情况,为确保多焊接机器人安全、顺利开展复杂焊接操作流程,十分有必要提前对控制机器人的工作路径和动作进行协调。
2焊接机器人在制造交通轨道装备中的具体应用
2.1 焊接机器人在制造交通轨道装备中的具体应用
在制造交通轨道装备过程中焊接机器人的应用有以下几种:①焊接 HXD3C 型电力机车的底架牵引梁横梁、中梁横梁以及旁承梁横梁等外部焊缝;②焊接 HXD3C 型的电力机车底架牵引梁整体、中梁整体以及旁承梁整体等外部焊缝;③焊接 HXD3C 型电力机车的转向架构架牵引梁、前端梁、后端梁、中梁、右侧梁及左侧梁等外部焊缝;④焊接 LTZ-800 型处理路基车转向架构架的侧梁外部焊缝;⑤焊接各类出口机车和调车机车的箱型梁外部焊缝;⑥焊接风缸环焊缝以及纵焊缝。焊接机器人的特点是具有稳定的焊接质量、优美焊缝外观等,其可通过寻找以及示教功能,利用编程对程序进行优化,以实现批量生产。在这
之中焊接机器人选用L型变位机的,因为变位机能够灵活地进行位置摆放,设计开发其工装,在焊接多种钢结构上都适用。
2.2 实例分析
机车底架是车体与转向架之间的连接部件,它是机车车体的关键承载部件,其焊接质量直接影响机车的运行安全。目前机车车体的许多部件,比如枕梁、边梁、箱型梁、弦梁等,均实现了自动焊,大幅降低了劳动强度,并保证了焊接质量。但是,由于底架是由多个大部件组焊而成的复杂焊接结构,受到焊接收缩的影响,底架的装配一致性差;并且机车底架吊运采取两台天车同时协作的方式,底架在变位机上的重复定位精度低,不能满足自动化焊接高精度的要求,因此,车体底架的焊接仍在采用手工焊,存在劳动强度大、焊接质量不稳定的情况,亟需对机车底架的自动焊进行工艺攻关。
2.2.1底架的结构组成
HXD1底架是一个由底架地板、牵引梁、枕梁、变压器梁、边梁等多个大部件组焊而成的复杂焊接结构,长度为17 086 mm,宽度为3100mm,质量为18 687 kg。
2.2.2底架自动焊设备
底架的自动化焊接采用型号为QRC 410E 的焊接机器人(以下简称“底架二转机器人”),主要由2套机械手、2 套 C 型架、1 套直线导轨和 2 个转胎组成。该机器人系统共有 13 个轴,其中 7 个机器人轴、6 个外部轴,可以满足底架正、反面焊缝的焊接要求。为了使机器人可以焊接主要车型的底架,底架二转机器人的转胎部分进行了通用化设计。转胎由底部支撑、齿圈支撑座、支撑齿圈、下压齿圈、侧翻预防块、侧面顶紧螺杆、扶手、吊环和电机等部分组成。2个转胎可分别在底部支撑上移动,移动范围为5 700 mm,可夹持长度范围为7000~ 15000mm。转胎上的侧面顶紧装置和侧翻预防装置可以进行调节,可以实现 2.6~3.3 m 不同宽度工件的装夹。基于模块化、柔性化的设计理念,转胎采用齿轮传动方案,使其满足了高精度的传动要求,实现了所有主型机车底架的通用。
2.2.3自动焊工艺的应用
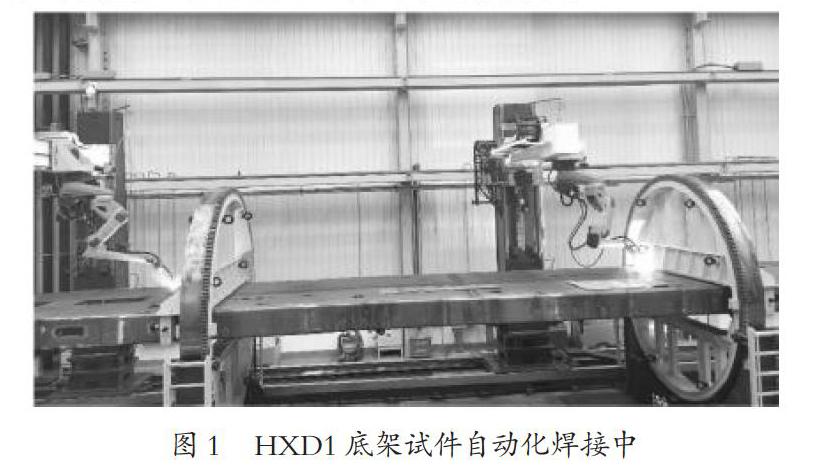
为了验证底架的自动焊工艺,制作了比例为1∶1的 HXD1 底架试件。如图1所示,采用先进的电弧跟踪技术和激光传感技术,按照上述底架的自动焊工艺方案,在底架二转机器人上对 HXD1 底架试件进行了自动化焊接。底架正反面焊缝的表面成型美观,无气孔、咬边等焊接缺陷产生。底架地板的焊接变形小,底架地板的平面度在2mm/2m以内。对底架试件自动焊焊缝进行了取样,其中典型的焊缝如:底架地板与边梁梁体对接焊缝 6HV/6HV、底架地板与牵引梁上盖板连接焊缝 6HV /6HV及底架地板与箱型梁立板连接焊缝 10HY、a5。从焊接接头宏观金相可以看出焊缝熔合良好,
不存在未熔合、咬边等焊接缺陷,说明底架的自动焊工艺方案满足底架的自动化焊接要求。最终实现了机车底架的自动化焊接,并完成了HXD1底架的自动焊批量化生产。
总之,通过采用模块化、柔性化的设计理念,转胎采用齿轮传动方案,使工装满足了自动焊高精度的传动要求。通过采用先进的电弧跟踪技术和激光传感技术,解决了底架装配一致性差的问题;对机车底架自动化焊接工艺展开了系统的研究,确定了合理的焊接顺序,在机车行业首次实现了底架的自动化焊接。
参考文献:
[1]张兴,刘助新,王金鹏,曹媛.激光焊接在电力机车上的应用研究[J].技术与市场,2019,26(10)
[2]贾海强,熊发,何正文.电力机车底架变压器梁宽度尺寸焊后不加工工艺[J].机车车辆工艺,2018(06)
