基于ANSYS的抓取机械手结构的静力学分析
2020-11-08朱文强
朱文强
【摘 要】本文主要针对抓取机械手结构进行有限元分析。首先通过三维建模软件SolidWorks对机械手部件进行绘制并保存,然后利用ANSYS中 workbench模块对模型进行导入,并且对机械手进行整体网格划分、局部网格划分、模拟实体载荷加入、添加固定约束,对在机械手模拟载荷下产生的总变形、等效弹性应变、应力云图进行对比分析,找出了该机械手在机构上最脆弱的位置,并针对该现象提出了优化解决方案。
【关键词】有限元分析;机械手;应力云图;优化解决
引言
机械手是一种能模仿人手和手臂的某些动作功能,以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
在机械手的设计制造过程中需要注意以下几点。对于机械手来说外形结构设计需要满足生产需要、材料的选取也要满足强度要求、应力集中部位要满足材料的强度、刚度等的要求。为了避免出现机械手结构强度不够或者结构存在重大缺陷等问题,所以在实际加工之前利用有限元软件对机械手结构进行分析是十分有必要的。
本文主要针对机械手结构进行分析,首先将设计的手爪的三维模型利用SolidWorks软件进行绘制,然后结合ANSYS的workbench的静定结构分析板块,通过网格划分,添加固定约束和外載荷,在考虑安全系数的前提下在模型上模拟添加最大载荷,并生成应力、应变云图等,并且结合所用材料的屈服强度进行对比,并对结构中最大应力部位进行分析,得出具有参考价值的有效结论,并根据结论提出相应的优化设计建议。
1 机械手结构
机械手在工厂的环境一般是潮湿、高温的,考虑到机械手的工作环境,我们设定机械手的材质为不锈钢,本次模型分析使用的是不锈钢,其材料属性为密度是 ,弹性模量为 ,泊松比为 ,拉伸屈服强度和抗拉屈服强度为2 。机械手的基本参数为79mm*70mm*32mm,机械手爪的基本工作原理是利用手爪的侧面挤压、并且靠折弯部分托底将需要抓取的工件固定,从而实现对要抓取工件的夹紧、搬运、转移,底部的螺栓孔是用于手和机械臂部分的连接。
2 机械手建模
利用solidworks绘图软件进行三维建模。
3 机械手的静力学分析
1)静态模块选择
选择:“Static Structural”静态分析模块。
2)材料选择和属性设置
我们所需机械手的材料是不锈钢,但是默认的材料为结构钢,所以我们需要进行新材料的添加以及相关的材料属性设置。
建立静态分析项目后,双击模块中的“Engineering Data”选项进行不锈钢材料的属性设置。
3)模型导入
右击静力学分析模块中的“Geometry”选项,将提前保存为“.x_t”格式的机械手模型导入到“Mechanical”中,如图3-4所示:
4)网格划分
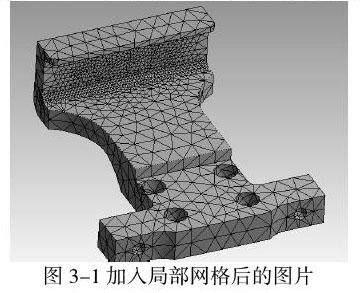
默认设定网格大小及其参数见图3-5,数量不能太少,造成网格比较小,但是网格过小将会大大增加计算机的计算量,并且会造成不必要的计算机资源浪费,所以鉴于该机械手结构并不是每个点都是脆弱的,针对可能存在的几个薄弱部位进行局部网格划分,经过初步分析,两倒角的位置可能是结构薄弱的地方,所以在两圆角部位加入局部网格,并且将这两个局部网格的大小设为0.001m。加入局部网格后的图片见图3-1。
5)添加载荷和固定约束
根据设计要求,该机械手设计的最大的搬运重量为50kg,乘上安全系数2得100kg,由于两个手爪共同完成抓取重物的动作,所以每一个手爪受力大小约为500N,并且在夹紧过程中机械手爪也会夹紧工件,所以由于反作用力机械手爪也会受到工件一个向外侧的推力,假设该推力大小为500N,将两个受力加入到模型中,在机械手模型的四个螺纹孔位置添加固定约束。
6)添加变形、应力、应变并进行云图生成
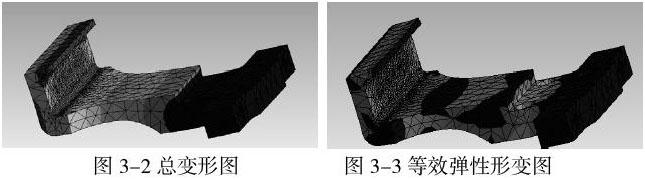
对于不同载荷下的支架分别添加整体的变形,整体的等效应力以及整体的等效应变并求解,总变形图见3-2、等效弹性形变图见3-3、等效应力图。
4 结果分析
1)整体变形分析
在多载荷的共同作用下的总变形图中可以看出,最大变形量为2.728mm,并且最大变形出现的位置在折弯薄壁部位。并且两个圆角位置变形量也较周围的变形量大,与我们设立局部网格的位置相同,也证明我们的设立。
2)弹性形变、应力分析
观察两种载荷下的等效弹性形变和等效应力云图,不难发现两个圆角部位和四个螺栓孔的位置有较大的形变和应力,通过比较发现结构中最大的应力仍小于我们材料的极限值,所以本次设计师合理的,但是圆角部分和四个螺栓孔的位置应该在考虑设计的合理性时需要适当的考虑。
5 方案改进
根据有限元分析的结果,结构显然满足我们的材料刚度的要求,但是我们也可以进行结构优化,在此,我针对前面的现象提出两点合理化的改进建议。第一,在底部的薄壁部分可以适当增加厚度,以减少此处的变形和应力。第二,四个螺栓孔可以增加为六个,并且设置均布,用以分散用于固定该机械手臂的力,可以有效的减少变形。
参考文献:
[1]曾攀.有限元分析基础教[M].清华大学.2008-12.
[2]曹华军,舒林森,许磊,李浩.复杂机械零件的六面体有限元网格生成方法[J].机械工程学报.2014,50(15):113-118.
[3]宋鹏,胡仁喜,康士廷.ANSYS 15.0有限元分析从入门到精通[M].北京:机械工业出版社,2015.
[4]关振群,宋超,顾元宪,隋晓峰.有限元网格生成方法研究的新进展[J].计算机辅助设计与图形学学报.2003,15(03):02-13.
[5]张文志.机械结构有限元分析.哈尔滨:哈尔滨工业大学出版社,2006,第1版
