用于飞机牵引车上的全方位主动安全防护系统
2020-11-08王大鹏惠钊蒙松畅科剑李博
王大鹏 惠钊 蒙松 畅科剑 李博
【关键词】飞机牵引车、全方位、安全防护系统、设计
Key words:Aircraft tractor,All-round,Safety protection system,design
对于飞机牵引车的制造,查阅《民用机场专用设备安全管理规定》和《飞机牵引车检测规范》等规范资料,同时通过查阅市场上的飞机牵引车相关产品技术资料,虽然对设备安全提出了明确要求,但是相关的标准、检测办法及产品技术资料里并没有对设备提出相关的“牵引车具有周围人员、设备、物资主动检测与防撞保护”的具体要求。但是,飞机牵引车在实际使用中,由于故障或操作失误而引发的对设备、物资、人员伤害的安全事故时有发生,有些甚至酿成人员伤亡的重大安全事故。
针对上述问题,目前有一种基于激光雷达的智能车防撞系统及方法,采用单线或多线的基于飞行时间原理的激光雷达(TOF或者360度范围扫描),在单一层面或者多层面进行扫描,确定周围环境物体的位置数据并对障碍物进行识别和避障。也有用一种机场地面飞机自动智能牵引系统及方法,“无人牵引车上还设置有激光雷达避碰系统、视觉识别系统和导航定位系统,工控机根据激光雷达避碰系统的反馈信息,控制无人牵引车避免与障碍物发生碰撞;视觉识别系统用于识别障碍物和记录无人牵引车的行驶图像,以及通过所述通讯系统将记录的行驶图像数据发送至所述调度中心;所述工控机通过将所述局域GPS/北斗双模差分定位模块和所述惯性导航模块的定位数据进行数据融合,实现对无人牵引车的液压夹持装置的准确定位。
上述方法虽然在一定程度上实现对周围环境的扫描,防止车辆发生碰撞等安全事故,但是这些技术方案均不能实现对车辆四周的全方位立体扫描,存在扫描盲区,只能扫描到对应平面的障碍物,扫描区域局限性较大,仍然不能完全确保车辆的的行驶安全。另外,飞机牵引车的抱轮机构在与飞机起落架的飞机轮胎进行对接时,牵引车自身没有对该工作过程进行全方位的监测装置,不能更好更快速的保证抱轮机构与飞机起落架的飞机轮胎的准确对接,容易造成飞机起落架的飞机轮胎和牵引车的抱轮机构的相互碰撞,特别是容易造成飞机部件的损害及报废。因此有必要进一步改进。
目前拟解决的技术问题:提供一种用于飞机牵引车上的全方位主动安全防护系统,拟采用激光雷达和VOS智能视觉传感器结合用于飞机牵引车牵引飞机行駛、以及与飞机起落架对接抱轮操作的安全防护措施,对飞机牵引车安全进行主动防护,确保在人为操作失误或设备故障的情况下充分提升飞机牵引车运行过程中对周围环境的识别和防撞保护能力,确保人员、设备、物资的安全。
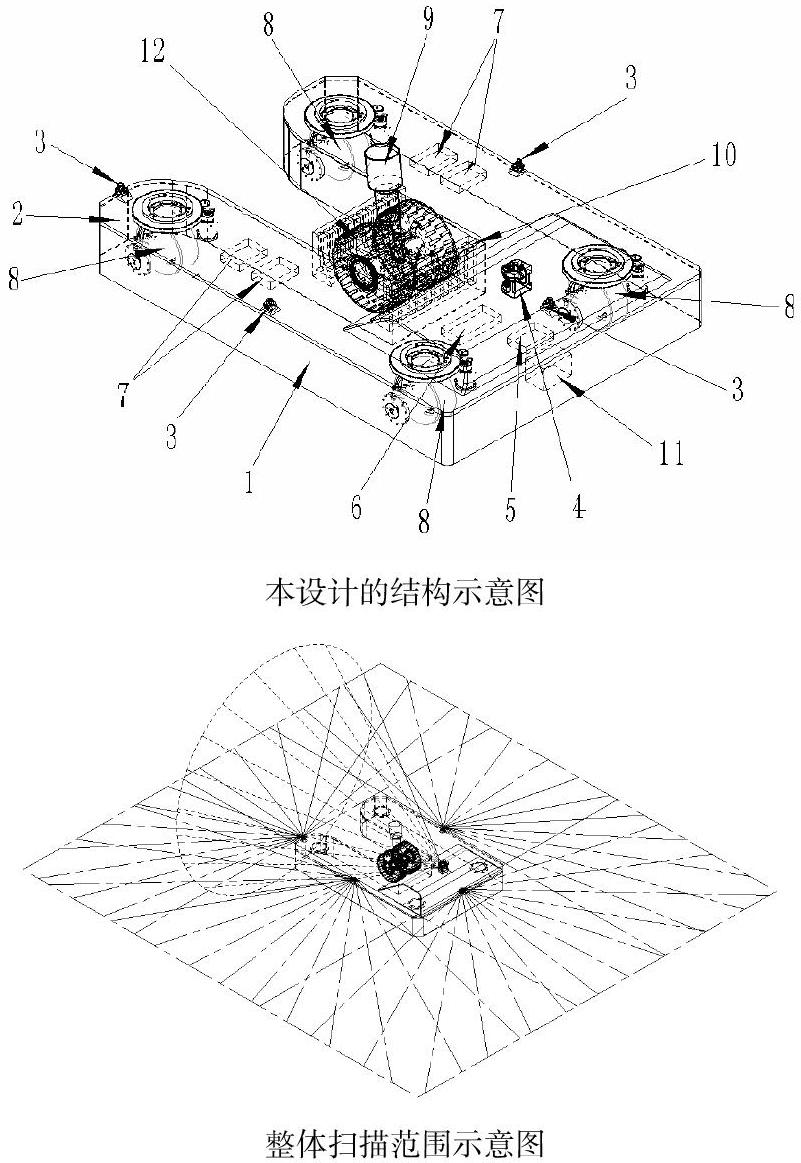
设计一个技术方案:用于飞机牵引车上的全方位主动安全防护系统,具有飞机牵引车,设定飞机牵引车包括车体,车体上设有车辆主控制器,下部前后均设有驱动单元,有控制驱动单元的驱动控制器,驱动控制器与车辆主控制器电连接;车体中部设有与飞机起落架的飞机轮胎进行对接的抱轮机构,车体上设有用于控制抱轮机构的动力单元,动力单元与车辆主控制器电连接;车体上设有车载数据处理器,所述车载数据处理器与车辆主控制器电连接;
车体四周设有多个对车体周围进行全方位三维立体扫描的激光雷达,该激光雷达与车载数据处理器电连接,激光雷达监测数据通过车载数据处理器分析处理后发往车辆主控制器,车辆主控制器根据车载数据处理器发送的指令通过驱动控制器控制驱动单元实现主动避让保护动作;
车体上部设有可对车体周围物体进行三维立体成像扫描而消除激光雷达扫描盲区并能对飞机起落架的飞机轮胎和飞机牵引车的抱轮机构对接情况进行监测的VOS智能视觉传感器,该VOS智能视觉传感器与车载数据处理器电连接,VOS智能视觉传感器的监测数据通过车载数据处理器分析处理后发往车辆主控制器,车辆主控制器根据车载数据处理器发送的指令通过动力单元控制抱轮机构和飞机起落架的飞机轮胎准确对接。
对上述技术方案进一步限定,多个所述激光雷达分别布置于车体的前后侧和左右两侧,激光雷达采用布置在车体对应侧面上部且斜向下扫描、布置在车体对应侧面底部且斜向上扫描、或者两种方式组合布置、或者与水平扫描组合布置。激光雷达的有效扫描范围最大为180°扇形面积内,有效扫描范围通过车载数据处理器设置后删除多余部分。
进一步限定,该VOS智能视觉传感器的视角范围为以VOS智能视觉传感器的信号发射口为中心的锥形范围;锥形范围的顶部中心角可根据飞机牵引车的尺寸大小进行调整以满足飞机牵引车和飞机起落架对接时使锥形范围扫描覆盖飞机起落架的足够范围以满足数据分析计算需要;VOS智能视觉传感器的方向可设为固定,VOS智能视觉传感器的方向也可随着飞机牵引车的行进方向进行旋转以满足补偿飞机牵引车行驶方向激光雷达扫描范围盲区补偿的需求。VOS智能视觉传感器的锥形范围通过车载数据处理器进行限制消除。
本设计与现有技术相比的优点:
1、本方案用于飞机牵引车牵引飞机行驶、以及与飞机起落架对接抱轮操作的安全防护措施,对飞机牵引车安全进行主动防护,确保在人为操作失误或设备故障的情况下充分提升飞机牵引车运行过程中对周围环境的识别和防撞保护能力,确保人员、设备、物资的安全;
2、本方案在车体周围倾斜布置多个激光雷达,能够对车体周围进行全封闭立体扫描,同时采用VOS智能视觉传感器进行激光雷达的扫描区域补偿,实现车辆四周方向的全范围立体扫描、障碍物识别和防撞避障保护,有效消除了激光雷达平面(单层、多层)只能扫描到对应平面的障碍物的扫描区域局限,确保车辆主动防护范围无盲区,安装调试、数据处理简单;
3、本方案还可采用VOS智能视觉传感器对物体进行三维立体成像,可准确测量飞机牵引车与飞机起落架对接时的角度、距离、偏移量,通过与控制系统、驱动单元连接,通过三维数据分析计算可实现飞机牵引车与飞机起落架的准确对接,实现在飞机牵引车与飞机起落架对接、抱轮操作过程接触时的防撞保护,避免人工观察造成飞机牵引车抱轮机构在对接、夹抱轮胎时对起落架和轮胎造成损伤,提高作业安全性和效率。
用于飞机牵引车上的全方位主动安全防护系统,属于飞机牵引车技术领域,在车体周围布置多个激光雷达,对车体周围进行全封闭立体扫描,同时采用VOS智能视觉传感器进行激光雷达扫描区域补偿,实现车辆四周方向的全范围立体扫描、障碍物识别和防撞避障保护,有效消除激光雷达只能扫描到对应平面的障碍物的扫描区域局限,确保车辆主动防护范围无盲区。采用VOS智能视觉传感器对物体进行三维立体成像,能够准确测量飞机牵引车与飞机起落架对接时的角度、距离、偏移量,实现飞机牵引车与飞机起落架对接、抱轮操作过程接触时的防撞保护,避免人工观察造成飞机牵引车抱轮机构在对接、夹抱轮胎时对起落架和轮胎造成损伤,提高作业安全性和效率。
