基于载波移相的MMC 电容电压均压控制
2020-10-15李运娣何国锋
慕 昆, 李运娣, 何国锋
(1. 河南工程学院 计算机学院, 河南 郑州 451191; 2.河南城建学院 电气与控制工程学院, 河南省智能输配电与功率变换工程研究中心, 河南 平顶山 467036)
0 引言
模块化多电平换流器具有运行损耗低、 输出波形品质好、易于安装维护、可冗余容错、稳定性高等优点, 这些优点使其在海上风力发电系统得到了广泛应用。MMC 子模块电容电压的稳定对整个电路的稳定具有重要作用, 所以对MMC 子模块电容电压的均压控制成为了系统运行的关键。目前,均压控制大多采用以下两种方法:一种是利用比例积分环节控制子模块的均压算法, 该方法简单,且均压效果好,但子模块数较多时,会导致控制电路过于复杂[1];另一种是将MMC 的其中一相子模块电压进行排序控制的均压算法, 但子模块较多时, 电压的排序运算易造成开关器件不必要的动作[2]。
针对这种情况, 本文采用一种基于载波移相的闭环控制策略实现MMC 电容电压的平衡[3]。 为了验证本文所提控制策略的真实性和有效性,在Matlab 中搭建对应的仿真模型,仿真结果表明,本文所提的控制策略能够有效, 快速地控制MMC系统中子模块电容电压的均衡。
1 模块化多电平换流器原理分析
MMC 的等效电路原理如图1 所示。 图中:Udc为直流母线电压;Ls为电感;Lo为负载上的电感;R 为负载上的电阻。
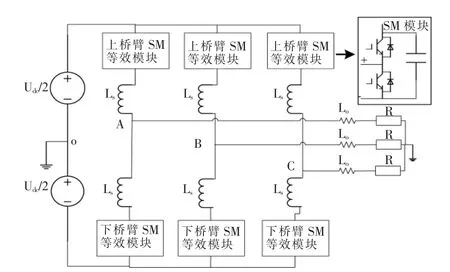
图1 MMC 的等效电路原理图Fig.1 Equivalent circuit schematic diagram of MMC
上、下桥臂之间串联两个电抗器,阻感负载为星形联结,负载中性点与两电源中点相连,以保持负载中性点与电源中点电位一致且为零电位[4],[5]。
单相逆变状态等效电路如图2 所示。
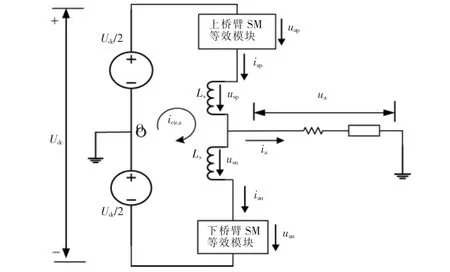
图2 单相逆变状态等效电路Fig.2 Equivalent circuit of single-phase inverter
图中:uap,uan分别为上桥臂和下桥臂的电压;Udc为直流侧电压;usp与usn分别为上桥臂和下桥臂上电感的电压;ua为A 相输出电压;ia为A 相的输出电流;iap为上桥臂电流;ian为下桥臂电流;icir.a为桥臂环流。
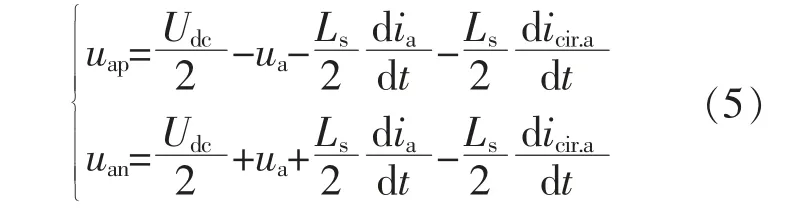
根据基尔霍夫定律,由图2 可得:
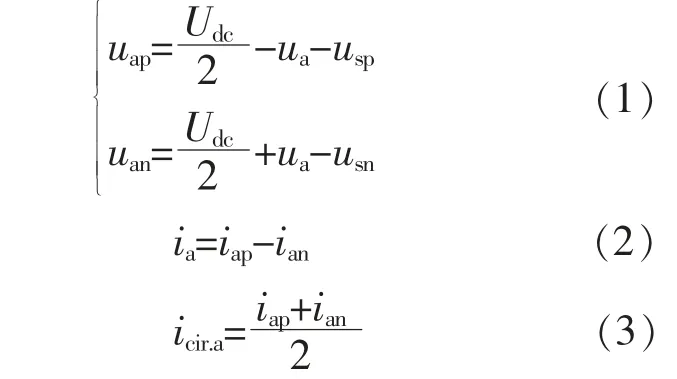
由式(2),(3)可得桥臂电流为
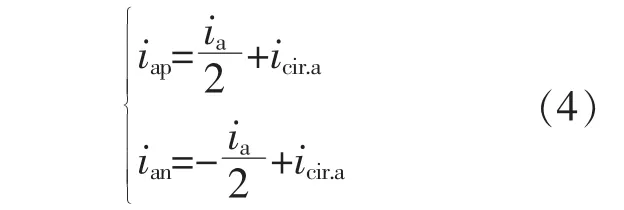
通过分析可知, 上桥臂和下桥臂的电流之和为共模电流, 所以上桥臂和下桥臂电流之和的1/2等于该相的环流,即为流入下桥臂的一部分电流,幅值相位都相同,且只在相间流动,并不通过交流侧[6],[7]。
联立式(1)~(3)可得:
通过上文分析可知,子模块电压为

由以上分析可知, 子模块电压用来维持直流侧电压的均衡。 所以子模块电压的均衡是MMC稳定运行的关键[8],[9]。
2 MMC 的载波移相控制
2.1 载波移相调制法的原理
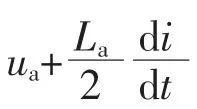
MMC 的单相全桥中SM 数共有2N 个, 每个子模块需要一个载波,把载波进行依次移相θ,得到2N 个载波,按照顺序编号[10]。载波分配给MMC其中的一相, 把第一个载波分配给上桥臂第一个模块,把第二个载波分配给下桥臂第一个模块;把第三个载波分配给上桥臂第二个模块, 把第四个载波分配给下桥臂第二个模块, 照此方式依次向下分配载波,上桥臂分配载波为奇数,下桥臂分配载波为偶数。选择正弦信号为调制波形,下桥臂与上桥臂的调制波相位相差180°。三相的调制波相位分别为0°,滞后120°,超前120°[11],[12],如图3所示。
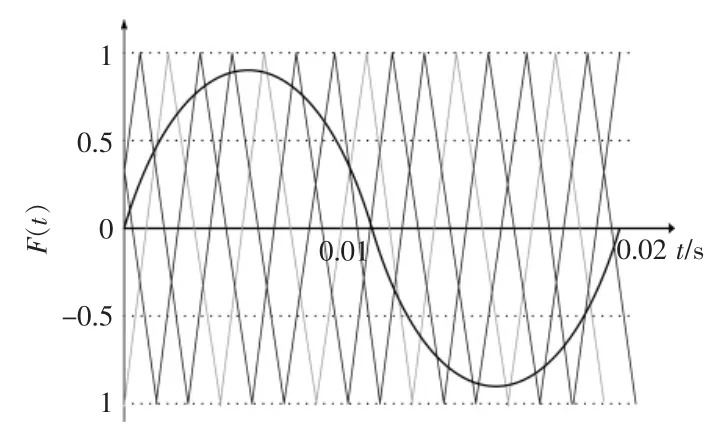
图3 上半桥臂载波与调制波原理图Fig.3 Schematic diagram of carrier wave and modulation wave for upper arm
图4 为MMC 上桥臂单个子模块开环控制的原理框图, 图中利用移相后的载波与调制波对比来控制开关器件的导通与关断。 下桥臂子模块控制调制波需要滞后180°。

图4 上桥臂单个子模块载波移相控制Fig.4 Carrier phase-shift control of upper bridge arm for single sub-module
2.2 基于载波移相PI 闭环控制
载波移相的闭环控制分为子模块均压控制和桥臂均压控制两部分。 将控制电路的输出叠加在调制波上, 使调制波上下平移, 这相当于改变了IGBT 开通与关断时间, 从而改变电容电压大小,实现电容电压均压的控制。
图5 为子模块均压控制的框图。 子模块均压控制是将SM 内的电容电压Uc与其理想值Uc0做对比,若电容理想电压值大于实际电压值,则当桥臂电流>0 时,电路为电容充电,输出值为+1;当桥臂电流<0 时,电路使电容放电,输出值为-1。反之同理[13]。
图5 子模块均压控制原理图Fig.5 Schematic diagram of voltage balancing control for sub-module
图6 为桥臂均压控制框图, 若桥臂电压的平均值小于电容电压理想值, 则环流值与参考值均为正, 电路对电容充电; 若环流值大于环流参考值,输出为正,增加电容充电时间;当环流值小于环流参考值时,输出为负,减小电容充电时间。 反之 同理[14],[15]。
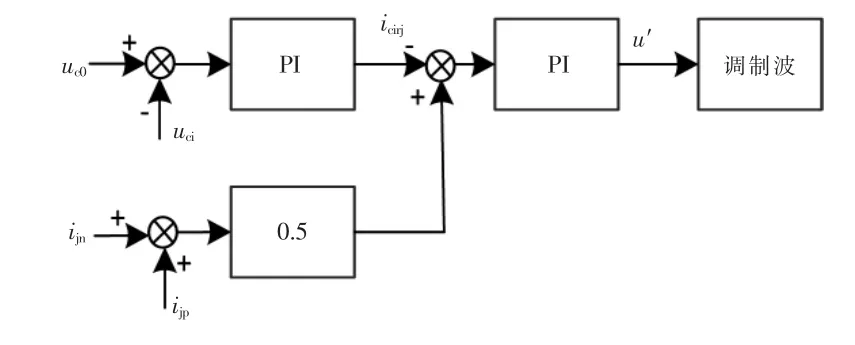
图6 桥臂均压控制原理图Fig.6 Schematic diagram of equalization control for bridge arm
这两种控制方法都是将补偿量与调制波叠加后, 得出最终调制波形, 但是各自的比较原理不同,一个是对子模块的控制,另一个是对一相整体控制,两者相辅相成。
2.3 闭环控制参数
模块化多电平换流器的参数: 直流侧电压为600 V,子模块电容为6 mF,桥臂电感为5 mH,子模块电容电压预充值为150 V。PI 参数:桥臂均压比例调节系数为1,积分调节系数为100;子模块均压比例调节系数为1,积分调节系数为20。
3 MMC 电容均压控制仿真
图7 为桥臂子模块为3 的四电平MMC 基于Matlab 的仿真模型。
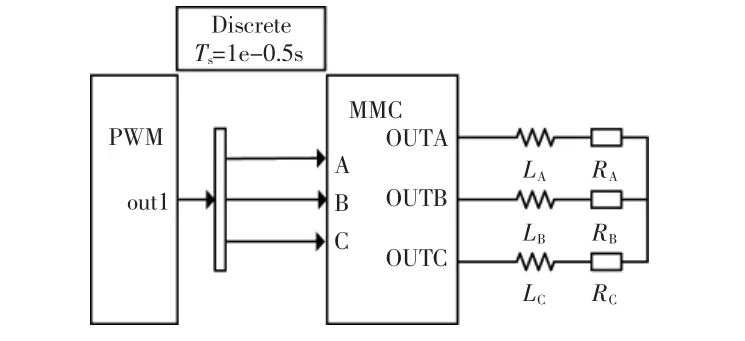
图7 基于Matlab 的MMC 仿真模型Fig.7 MMC simulation model based on Matlab
PWM 模块为闭环控制电路部分,MMC 模块为主电路部分[16],其仿真电压、电流波形如图8,9所示。
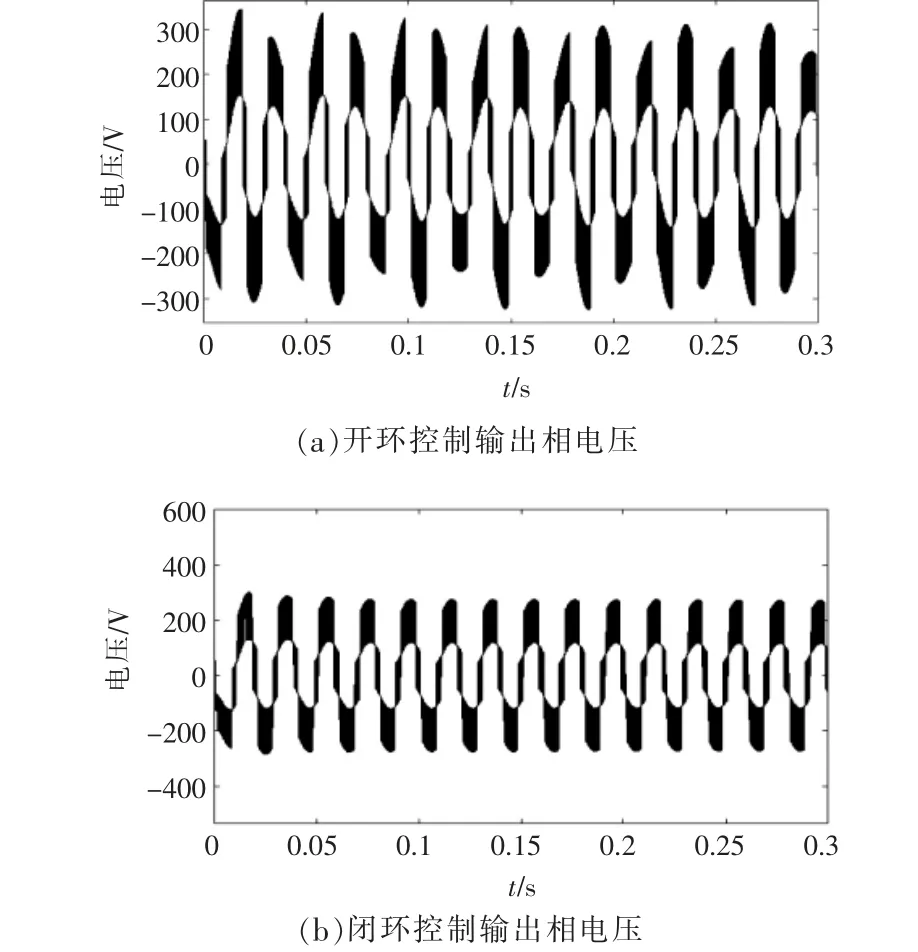
图8 开闭环控制输出相电压Fig.8 Open closed loop controls the output phase voltage

图9 开闭环控制输出相电流Fig.9 Open closed loop controls the output phase current
由图8 可以看出,开环控制、闭环控制都显示出了四电平电压波形,与MMC 的运行原理一致,但是开环控制波形明显发生了畸变, 且电压波形并不稳定。开环在0.1 s 时波形畸变率与闭环控制接近,但是随着时间的推移,其波形畸变率将远远超过闭环控制。由图9 可以看出,输出电流波形与输出电压波形情况一致, 同样显示出闭环控制优于开环控制。 在实际中, 电路不可能保持绝对对称,而且预充电不一定为理想值200 V,实际运行中存在不确定因素, 所以使电容预充电值处于非理想状态进行仿真。
电压波形取从0~10 个周波,电流波形从0.1 s 开始,4 个周波结束,表1 为A 相电压与电流的波形畸变率。
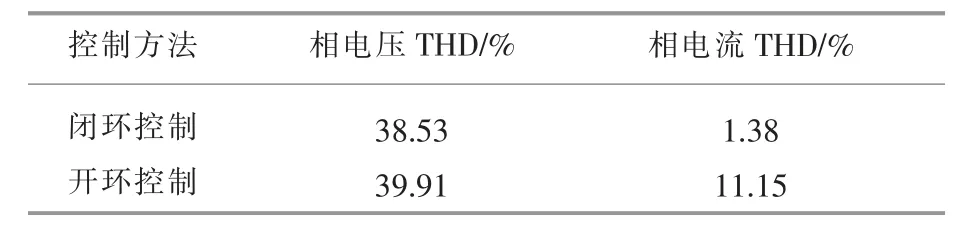
表1 交流侧波形畸变率Table 1 Waveform distortion rate at AC side
由表1 可知,闭环控制参数选为最优参数,闭环控制的波形畸变率将减小, 但是开环控制波形畸变率将先变小随后逐渐变大, 超出表1 中的数据。
桥臂电压与输出电流波形变化如图10 所示。

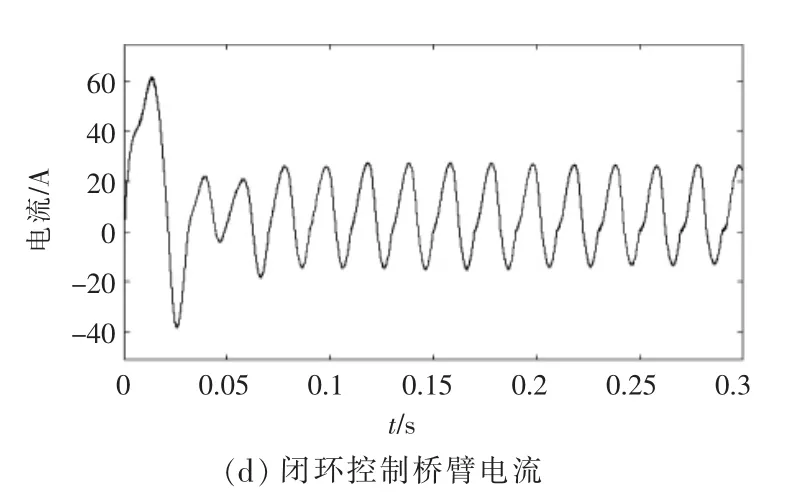
图10 开闭环控制桥臂电流Fig.10 Open closed loop control bridge arm current
由图10 可知,开环控制相较于闭环控制波形畸变率更大, 均压控制下的MMC 在运行时桥臂电压更为稳定。图10 中闭环桥臂电流刚好为输出相电流的1/2,满足桥臂电流的计算公式。 开环控制桥臂电流大于闭环电流, 结合桥臂电流计算公式可知,均压控制对环流抑制也有一定的效果。
为验证均压控制策略的有效性, 对电容电压进行检测,仿真结果如图11 所示。
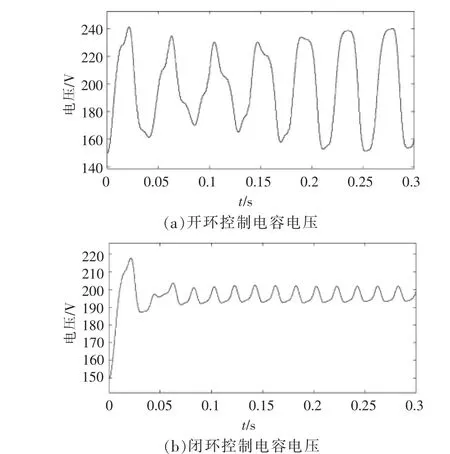
图11 开闭环控制电容电压Fig.11 Open closed loop controls capacitor voltage
由图11 可知,开环控制电容电压上、下幅值差超出80 V,闭环控制电压上、下幅值差为16 V。电压波动小,验证了均压控制策略的有效性。
4 结论
本文采用载波移相的闭环控制策略实现了电容电压均衡。 将输出的电压、电流反馈比较后,信号经过PI 控制器产生的补偿量叠加在调制波上,形成了子模块的均压控制和整个桥臂的均压控制,确保了MMC 每个子模块电容电压稳定和直流侧电压的稳定,实现了整个MMC 系统的稳定,同时对MMC 的环流也产生了抑制作用。
