高分七号激光测高仪激光光斑特性初探
2020-09-27中国科学院上海技术物理研究所中国科学院空间主动光电技术重点实验室刘智慧黄庚华廖阳阳谢锋
文|中国科学院上海技术物理研究所、中国科学院空间主动光电技术重点实验室 刘智慧 黄庚华 廖阳阳 谢锋
0 引言
高分七号卫星(GF-7)于2019年11月3日在太原成功发射,它是我国首颗亚米级高分辨率光学传输型立体测绘卫星,也是民用测图精度最高的卫星,主要载荷于11月5日在轨开机工作并下传数据。GF-7搭载了具有全波形记录能力的对地观测激光测高仪,该激光测高仪采用双波束激光测高,并首次配备了足印相机分别对两束激光光束成像,可辅助确定光斑位置;GF-7激光测高仪还配置了监视相机对两束发射激光成像,可辅助分析激光指向的稳定性。美国地球科学激光高度计系统(GLAS)搭载的激光参考相机对发射脉冲成像得到激光参考阵列(LPA)影像,LPA记录了GLAS发射激光脉冲的能量分布,监视相机的作用与LPA有相似之处,可用于分析GF-7两束发射激光光束的能量分布、指向稳定性等,对分析激光测高仪在轨运行状态具有重要意义。本文对GF-7地面研制和初始在轨运行时监视相机图像中发射激光光斑特性进行初步探索分析,主要包括激光光斑质心稳定性、光斑分布范围稳定性,以期为激光测高仪在轨运行状态分析与数据应用提供参考。
1 研究方法
监视相机图像中发射激光光斑特性分析流程图如图1所示。

图1 监视相机图像中发射激光光斑特性分析流程图
1.1 监视相机图像光斑区域提取
监视相机图像大小为550×550像素,发射激光光斑在图像中占比较小,以两个发射激光光斑的初始光斑中心最大值为基准,在行列方向上分别扩展20个像素形成40×40像素的图像区域,在该区域内进行光斑特性初步分析。
1.2 阈值分割
阈值分割的目的是提取出用于分析激光光斑特性的区域,阈值的确定采用迭代选取法。首先提取激光光斑图像的最大值DNmax和最小值DNmin,设定初始阈值

以初始阈值将激光光斑图像分为背景和目标两部分,再分别计算背景和目标区域像素均值Pback和Pobj,重新计算阈值
以Tk+1为阈值进行图像分割,然后再重新计算Pback和Pobj,迭代进行此过程直到Tk和Tk+1的差值小于某个设定值或达到最大迭代次数,根据此时的阈值对激光光斑图像进行分割得到光斑区域,该区域外的像素值赋值为0。
1.3 质心提取
光斑质心提取对于激光光轴稳定性分析有重要意义。常用的中心定位方法可分为基于灰度和边缘拟合两大类。基于灰度的常见方法是灰度质心法,基于边缘的方法包括圆和椭圆拟合法。本文利用灰度质心法和椭圆拟合法分别计算激光光斑的质心,对比不同方法得到的质心稳定性。
灰度质心法主要是以灰度作为权重计算光斑的质心,其计算公式如下:

椭圆拟合法根据激光光斑边缘数据,通过最小二乘法对边缘进行椭圆拟合,椭圆中心为质心位置。椭圆的参数方程可表示为公式(5)

其中,xc、yc表示中心位置,a、b表示长短半轴,θ表示椭圆离心角,α表示椭圆旋转角。利用非线性最小二乘优化边缘点与拟合曲线正交距离的平方和,得到参数方程的各参数,进而确定光斑的质心。
2 实验分析
本文中采用2019年9月27日地面研制阶段和2019年11月5日卫星初始在轨运行测试阶段的两个数据包作为分析数据。卫星在发射与在轨运行过程中因受振动、重力和热环境变化等因素的影响,激光光轴可能发生变化,表现为激光光斑质心位置的变化,而稳定性是体现载荷运行状态的重要指标。GF-7激光测高仪采用双波束模式,监视相机对两束发射激光光斑成像,本文中地面和在轨运行数据的发射激光光斑均未达到饱和状态,图像连续无异常。
2.1 激光光斑图像
地面研制阶段监视相机图像中波束1激光光斑区域和波束2激光光斑区域相对于整体监视相机图像左上角像素位置(1,1)的位置分别为(286,51)和(133,201)。卫星初始在轨运行测试阶段监视相机图像中波束1激光光斑和波束2激光光斑图像相对于整体监视相机图像左上角像素位置(1,1)的位置分别为(291,42)和(138,209)。图2所示分别为地面研制阶段和卫星初始在轨运行测试阶段监视相机图像中激光光斑1和激光光斑2,从图中可以看出,激光光斑的形态有微小变化。
2.2 质心稳定性
质心稳定性是激光光轴稳定性的直观表现,不同质心提取方式得到的质心位置稍有差别,但是通过对序列质心位置进行统计分析能够反应出质心位置的总体稳定情况。表1是用两种质心提取方式对539帧地面和242 帧在轨监视相机图像进行质心提取的统计结果。
从图2和表1可以看出,(1)在轨运行测试阶段的质心位置与地面测试阶段相比发生了变化;(2)两种质心提取方法对同一数据包中监视相机图像提取的同一光斑质心位置差异较小,一定程度上反应了监视相机图像噪声是比较小的;(3)卫星在轨运行后两束激光x、y 方向的稳定性在都在0.4个像素内,质心稳定性良好,系统在轨运行平稳。
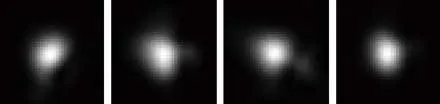
图2 激光光斑(a)地面激光光斑1(b)地面激光光斑1(c)在轨激光光斑1(d)在轨激光光斑1

表1 光斑1和光斑2 质心位置统计结果
2.3 参与计算的像素数
采用阈值分割确定参与光斑特性计算的图像像素,该像素数反应光强分布范围及足印的面积。对监视相机图像统计参与质心计算的像素数,结果见表2。

表2 参与计算的激光光斑像素数
从表2可见,两个激光器参与计算的激光光斑像素数比较稳定。在地面研制阶段,激光器1的光强集中且稳定,初始在轨运行时,激光器1具有更好的稳定性,激光器2的光强分布更加集中。
3 结论
采用激光测高仪地面研制阶段和初始在轨运行测试阶段监视相机图像数据,采用迭代选取法计算阈值确定光斑区域,通过灰度质心法和椭圆拟合法分别提取激光光斑质心,对同一数据同一光斑两种方式提取的激光光斑质心位置差异较小;初始在轨运行时质心稳定性在0.4个像素内;统计参与质心计算的像素数,该像素数比较稳定。综上,卫星受发射过程震动、重力释放、温度变化的影响,光轴指向、分布范围虽发生变化,但初期在轨运行时激光光斑质心、光斑面积稳定性高,设备运行状态良好。本文分析采用的是地面研制阶段和激光测高仪初始开机运行时数据,其中地面研制阶段数据与设备发射前状态有可能存在差异,激光初始在轨运行环境也可能未稳定,激光测高仪的连续运行状态需依据序列在轨数据展开,也是后续研究工作的重点。