未知不对称死区补偿方法在三轴微机电陀螺控制中的应用
2020-09-18卓书芳黄宴委何用辉郭世南
卓书芳,黄宴委,何用辉,郭世南
(1.福建信息职业技术学院 自动化工程系,福建 福州 350003;2.福州大学 电气工程与自动化学院,福建 福州350116)
MEMS陀螺仪是一种新兴的惯性角速率传感器,以其极小体积质量、极低成本功耗的优点,已在惯性导航、汽车工业、生物科技和消费终端等领域得到大量应用[1-2]。然而,由于微加工带来的机械耦合、不等弹性、热力学噪声、尺度效应、微弱信号检测等技术约束,大多数商用MEMS陀螺仅限于速率级水平[3],仍属于中低精度的惯性器件,因此从不同途径提高角速率检测精度成为研究热点。
在MEMS陀螺的常规操作模式下,要求激励电压与驱动模态/敏感模态谐振。显然,这种一轴驱动一轴检测的操作模式存在本质缺陷:为削弱驱动模态上的耦合哥氏力,要求敏感模态振幅约为驱动模态的千分之一,这不利于信号检测[4]。为此,Park 等[5]率先提出一种全新的MEMS陀螺驱动检测原理,将力反馈控制思想和自适应控制中的持续激励理论结合应用在MEMS陀螺的双轴闭环控制中,将陀螺的测量问题转化为参数估计问题。在Park等操作模式启发下,James等[6]提出了一种新概念三轴MEMS陀螺结构,该结构理论上用一个振动质量块即可检测三个轴向的角速度。在这种新概念三轴陀螺的研究中,Fei等[7]应用神经网络和模糊逻辑[8]补偿系统的参数不确定性和阻尼刚度耦合。而王伟等[9]则关注了力电换能过程中的扇区有界非线性效应,应用自适应控制对扇区下界进行估计补偿。本文在上述基础上,研究力电换能过程中的死区效应,采用两个耦合 RBF神经网络分别逼近执行器死区的逆和经过死区后的不可测控制力。稳定性分析中权值矩阵的更新采用弱耦合自适应律实现,利用比例微分滑模面实现陀螺三轴的轨迹跟踪。
1 三轴MEMS陀螺动力学及死区建模
1.1 三轴MEMS陀螺动力学模型
常规MEMS陀螺的z方向悬空,而文献[6]所提的新概念结构在z轴方向分别添加驱动和敏感模块,如图1所示。
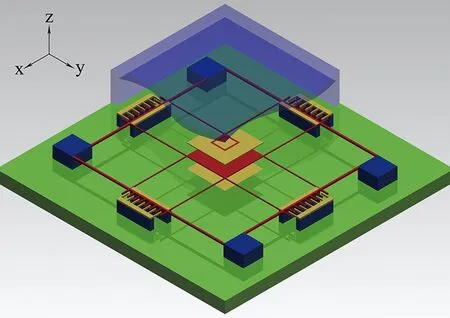
图1 单质量块三轴MEMS陀螺仪概念图Fig.1 Conceptual structure drawing of single-mass MEMS triaxial gyroscope
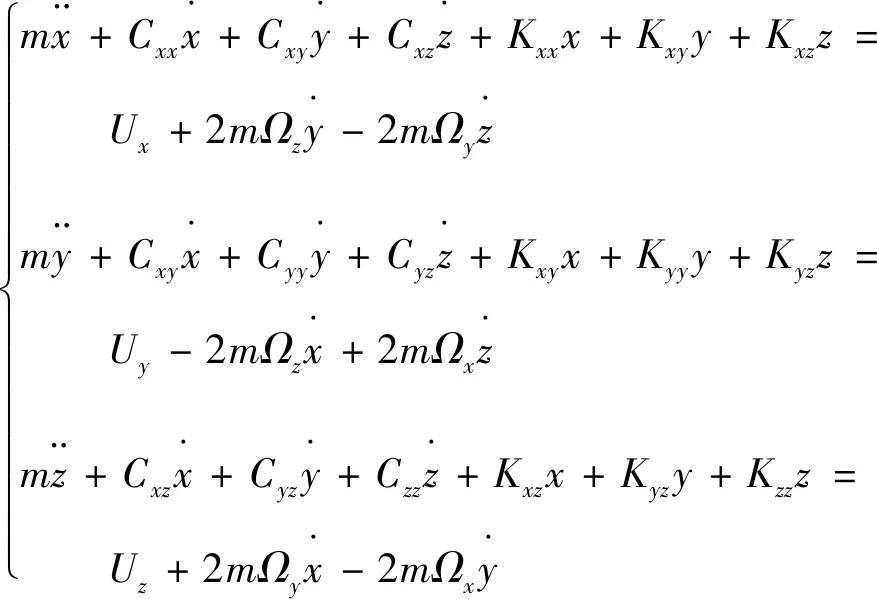
考虑不理想的陀螺正交耦合,三轴MEMS陀螺的动力学方程可以用如下的二阶线性常微分方程组表示:
(1)
式中:Ux,Uy,Uz表示三个轴向的再平衡控制;Cxx,Cyy,Czz为三个轴向的等效阻尼项;Kxx,Kyy,Kzz为三个轴向的等效刚度项;假设机械正交耦合导致对称的阻尼项Cxy,Cxz,Cyz和刚度项Kxy,Kxz,Kyz;Ωx,Ωy,Ωz是三个轴向的外部载体角速度。
参考文献[10],对上式的动力学模型进行无量纲化处理,得无量纲化的矩阵系数方程为

(2)
式中
1.2 三轴MEMS陀螺驱动梳齿的死区模型
MEMS陀螺仪三轴的驱动梳齿死区特性如图2所示。其数学表达式为
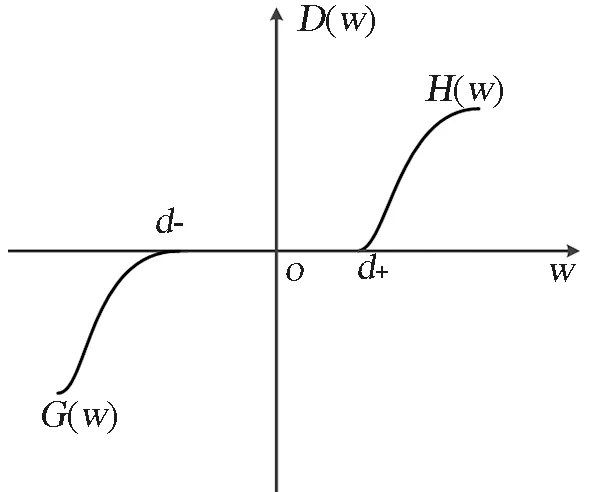
图2 未知不对称死区Fig.2 Unknown asymmetric dead zone
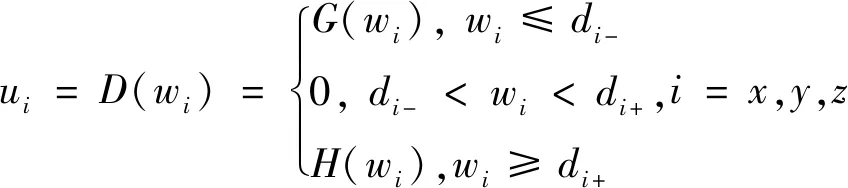
其中:wi为陀螺驱动梳齿的电压输入;ui为相应驱动梳齿生成的驱动;H(wi)和G(wi)分别表示正负死区的未知连续特性;di-和di+分别表示死区的负边界和正边界。补偿思路为死区逆模型串联理想控制器,其中死区逆模型D-1(wi)利用RBF补偿网络进行局部反馈获取。死区逆模型假设为
(3)
式中v为理想控制器输出。从而有
D(D-1(v))=v
(4)
控制的目的是希望驱动梳齿的输出u近似等于理想控制器输出v。考虑实际应用,两个假设如下:
假设1 驱动梳齿的死区输出u不可测。
假设2 死区参数的真实值H(w),G(w),d-和d+都是未知,H(u)和G(u)在规定区域内为单调可逆增函数,d-<0,d+>0,H(w)>0,G(w)<0。
2 基于自适应神经网络的三轴MEMS陀螺死区补偿设计
神经网络补偿器的基本原理如图3所示。

图3 神经网络补偿器原理图Fig.3 Schematic diagram of neural network compensator
其中,v为理想控制器生成的控制信号,w为死区补偿后的实际控制输入,u为经过驱动梳齿后作用到检测质量块的物理控制力。
由图3可知
(5)
式(5)的死区逆可等效表示为
D-1(v)=v+vNN
(6)
式中
(7)
利用RBF网络的无限逼近特性可得:
(8)

(9)
(10)
式中:w,v分别为两个神经网络的输入信号;j为隐层节点的个数;hj为高斯基函数的输出;W1,W2分别为补偿不确定性和补偿死区的理想权值;ε1,ε2为两个网络的逼近误差。根据u,vNN的表达式,两个RBF神经网络的输出可分别表示为:
(11)
(12)


(13)
假设3 两个权值矩阵范数有界,且满足‖W1‖F≤γ1,‖W2‖F≤γ2。
假设4 两个网络的逼近误差范数有界,且满足‖ε1(w)‖≤δ1,‖ε2(v)‖≤δ2。

(14)

(15)
(16)
式中:L(ξ)为一阶泰勒展开的拉格朗日项;符号°表示Hadamard乘积。
证明:
式(5)代入式(8),得

(17)
而根据式(4)和式(6),得
v=D(D-1(v))=D(v+vNN)
参考式(9),式(17)为
(18)
定义


(19)
式中拉格朗日余项为

(20)
将式(19)和式(20)代入式(18),并将b(t)代入,得
参考式(5)和式(13),上式为
(21)
式(21)两边同时加ε1w并移项整理,得
将式(15)的‖d(t)‖和式(8)代入上式,得
即
d(t)
证毕。
定理2 向量d(t)范数有界,且满足

(22)
式中β1—β4均是正常值,其具体表达式如下:

(23)

证明:
‖b(t)‖+‖ε1(w)‖
(24)
参考假设3中的‖W1‖F≤γ1,‖W2‖F≤γ2,式(24)为
‖W1‖F‖L(ξ)‖+‖ε1(v+vNN)‖+
‖ε1(w)‖
(25)

参考式(20)和假设4,式(25)为
证毕。
神经网络补偿器中权值矩阵的传统自适应律分别设计为:

(26)

(27)
式中:S,T分别为正定对称阵,满足ST=S,TT=T;正常数κ1≥0,κ2≥0;s是三轴滑模面组成的向量。
针对式(2)的三轴陀螺状态方程,考虑阻尼刚度不确定及外界干扰,方程(2)可写为
(28)
式中:dm为外界干扰;矩阵ΔC,ΔK表示系统阻尼刚度矩阵的不确定参数。式(28)整理得

(29)

假设陀螺3个轴向的参考轨迹为xm=Axsinωxt,ym=Aysinωyt,zm=Azsinωzt。将其同样写成状态方程形式,即

(30)
定义系统的状态跟踪误差为
e=qm-q
(31)
定义比例-微分滑模面为

(32)
对比例-微分滑模面取一阶导数

(33)
式中
理想控制律设计为

(34)
将理想控制律式(34)和式(14)代入式(33),得闭环滑模动态为
(35)
定理3选择理想控制律式(34),死区补偿器式(8)以及两个RBF的权值自适应律式(26)和式(27),则闭环控制系统的跟踪误差一致有界稳定。
证明:
针对式(35)的滑模动态,设计Lyapunov函数为

(36)
对上式求导,得

(37)
将式(35)的滑模动态代入式(37),得
(38)
(39)
根据矩阵的迹的性质,对任一矩阵M,如下不等式成立:
则式(39)为
(40)
式中λmin(·)表示矩阵的最小特征值。而根据矩阵范数的三角不等式,可得
则式(40)为
(41)
考定理2,则式(41)为
(42)
即满足上述不等式的一组κ1,κ2可使整个闭环系统稳定。上述稳定性分析可以看出,κ1=0,κ2=0是上述不等式的一组可行解。与传统自适应律式(26)和式(27)相比,这组可行解可以大大减弱两个RBF网络的权值耦合,降低控制的复杂度。因此,本文改进的权值自适应律为:
(43)
证毕。
3 仿真验证及分析
为了验证两个神经网络对未知死区的补偿效果,利用Matlab/S-Function对整个陀螺闭环系统进行了仿真实验。假设三轴MEMS陀螺仪的各项设计参数如下[7-8]:

无量纲化过程中,参考长度取q0=10-6m,参考频率取w0=3 kHz。假设三个轴向的参考轨迹为:
xm=sint,ym=1.2sint,zm=1.5sint。
仿真过程中,滑模面比例增益c=5,控制参数Kcom=50,死区特性描述为:
正定对称阵S,T的主对角线取值为500,RBF神经网络隐含层结点的高斯参数中心值cj选取神经网络输入值范围内的值:
c1=c2=

两个RBF网络的权值矩阵初值均设置为20。陀螺的三轴位置初始状态设为
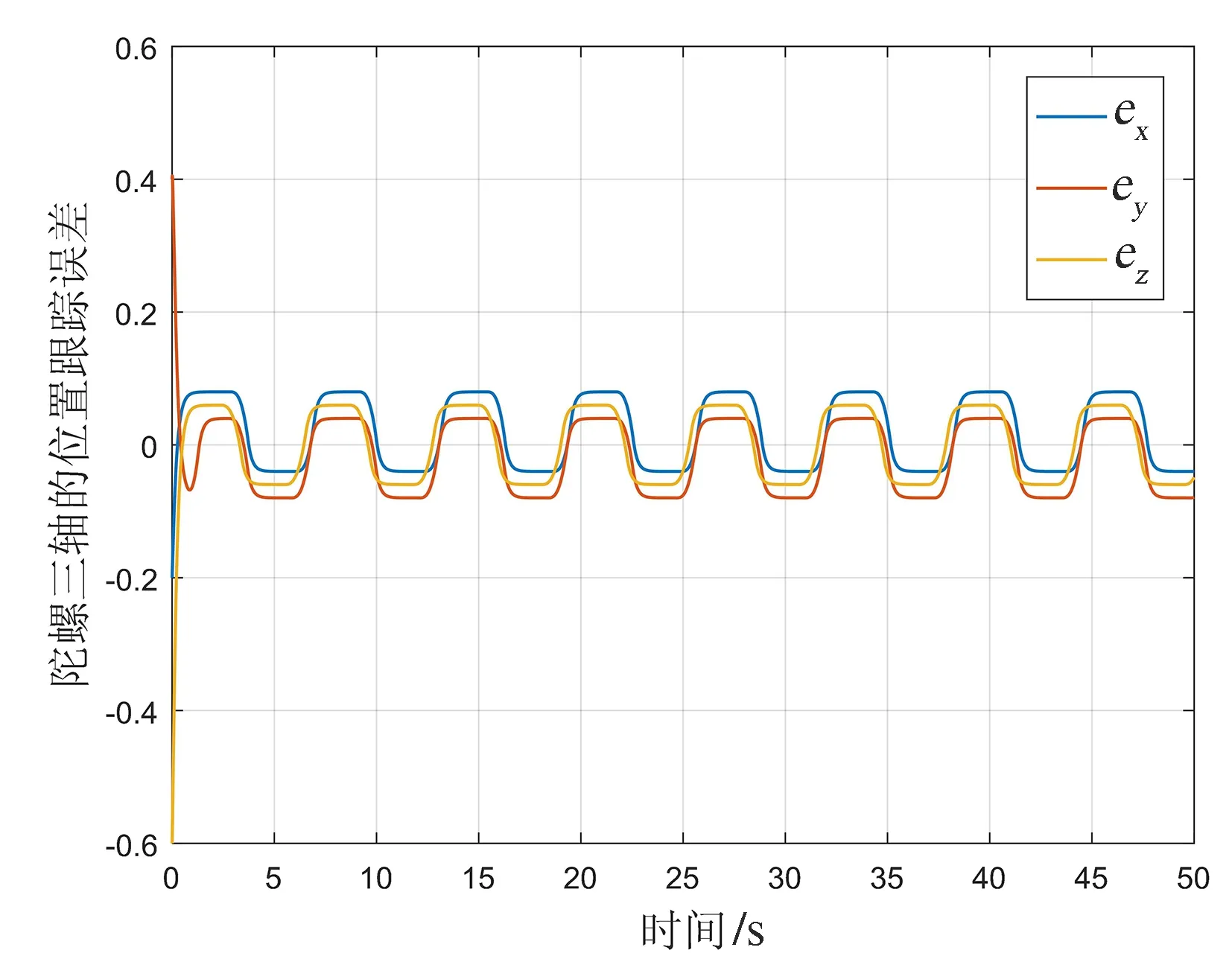
仿真结果如图4—图6所示。
(a)无死区补偿

图5 死区补偿后的各轴向控制输入Fig.5 Triaxial control inputs with dead zone compensation
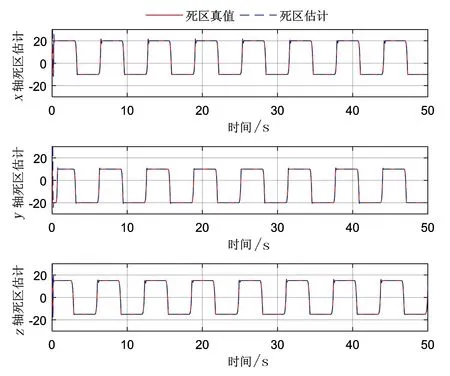
图6 陀螺各轴向的死区估计Fig.6 Estimation of triaxial dead zone
图4(a)表明只利用滑模控制律,不采取任何死区补偿措施时,位置跟踪误差存在震荡,这种震荡反应到速度跟踪误差中将会造成很大的角速率精度损失;图4(b)表明在本文的复合控制器作用下,陀螺三轴的位置跟踪误差可以在1 s左右收敛到0,且动静态性能良好,说明RBF网络对死区效应起到了很好的补偿效果。
图5为经过神经网络补偿器后各轴向的控制输入,图6为陀螺各轴向的死区估计结果。由图6仿真结果可见,神经网络补偿器能够精确估计死区边界常数和边界外的非线性力电函数。
4 结束语
本文针对Park S操作模式下三轴MEMS陀螺轴向轨迹跟踪中的驱动梳齿死区问题,提出了基于权值自适应神经网络和滑模控制的复合控制器。整个控制过程中用到两个RBF神经网络。稳定性分析中通过新算法设计削弱了两个网络的强耦合。仿真结果证明了该复合控制器能够以较高精度估计执行器未知死区特性并实现前馈补偿,保证了ParK S操作模式下MEMS陀螺三轴运动的精确跟踪。
