垂直发射弹药脉冲发动机转弯控制方法*
2020-09-01邓海鹏栗金平梁益铭杨姝君
邓海鹏,栗金平,姜 智,梁益铭,杨姝君
(西安现代控制技术研究所, 西安 710065)
0 引言
垂直发射方式由于其方位无死角、响应快等优点,在地空、地地导弹以及智能弹药等领域被广泛应用。垂直发射弹药的弹道可以分为垂直上升段、快速转弯段和导引段。为了在动压较低的上升段实现快速转弯,往往需要借助燃气舵、脉冲发动机等产生转弯力矩,使弹轴转向发射前装订的空间方位。
1 问题提出
文中以某智能弹药为背景,对其转弯段控制方法进行研究。该弹在垂直发射后接近零速时通过4个尾部脉冲发动机进行弹体姿态调整,将弹体姿态调整到指定空间方位,随后推进旋转发动机点火,将弹药推向目标。调姿结束后弹药不再控制,如果两个方向姿态不能同时到达指定值,则炮口扰动就会产生姿态控制误差(炮口扰动本身也会使两个方向姿态不能同时到达指定值)。为了将弹药准确推向目标,需要设计一种考虑炮口扰动的姿态调整控制方案来实现弹药姿态的准确调姿。
2 技术方案
文中所研究智能弹药的工作过程可以简单描述为:地面测量装置在弹体发射前通过测量得到目标相对于发射系的空间方位并在激发前装订信息给弹药;弹载惯性装置实时测量弹体姿态角及姿态角速率;弹载计算机利用装订信息及惯性装置测量信息经过坐标转换、限幅、计算偏差角度、进行点火策略逻辑运算等,给出4个脉冲发动机点火指令,产生直接力控制弹体转向空间指定方位(见图1)。

图1 工作过程示意图
由于弹药采用垂直发射,文中采用如图2所示欧拉角转动次序。

图2 坐标转动顺序
从弹体尾部朝着头部看,发动机安装如图3所示:4个姿控脉冲发动机编号1、2、3、4,当弹体系的oxz平面与水平面平行时,惯导的水平姿态角(俯仰角、滚转角)输出为0。并假设每个脉冲发动机点火会产生165°/s的弹体姿态角速率。
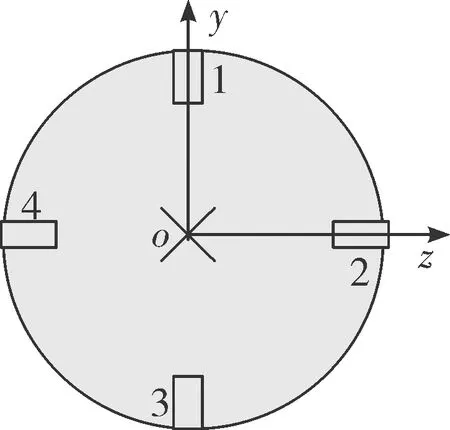
图3 脉冲发动机布局(从弹体尾部看)
根据弹载惯性装置提供的弹体的姿态角及姿态角速率定义新弹体系,使得俯仰、偏航姿态角速率在新弹体系下投影大小相等。因此新弹体系是将弹体系绕其纵轴旋转一定角度Δγ,旋转角度按式(1)、式(2)计算:
(1)
(2)
式中:ωz、ωy为弹体的俯仰、偏航角速率;Fsp、Fsy为俯仰、偏航点火标志(0为未点火,1为已点火);C1、C2为控制偏差角;ϑc、ψc为发射系下目标空间方位;ϑ、ψ、γ为弹体相对发射系的实时空间姿态。结合新弹体系定义及上面计算得到的Δγ,弹载计算机通过坐标转换将发射系下目标空间方位转换到实时新弹体坐标系,方法如下:
(3)
式中:A1、A2、A3分别为目标空间方位的单位向量在新弹体坐标系XbYbZb三个轴上的分量。
下面计算控制偏差:
(4)
进行限幅:
(5)
控制偏差计算:
(6)
式中:C1、C2、C3为目标空间方位在新弹体系下投影的偏差角度;HD为常数57.3;DHP为两个方向角偏差作差取绝对值。
脉冲调姿发动机点火策略:
1)开始转弯点火策略
若C3(200)≤0.95°,则:
Fs1=0,Fs2=0,Fs3=0,Fs4=0
(7)
若C3(200)>0.95°,|C1(200)|≥|C2(200)|,C1(200)≥0,则:
Fs1=1,Fs3=0,Fsp=1
(8)
若C3(200)>0.95°,|C1(200)|≥|C2(200)|,C1(200)<0,则:
Fs1=0,Fs3=1,Fsp=1
(9)
若C3(200)>0.95°,|C1(200)|<|C2(200)|,C2(200)≥0,则:
Fs2=1,Fs4=0,Fsy=1
(10)
若C3(200)>0.95°,|C1(200)|<|C2(200)|,C2(200)<0,则:
Fs2=0,Fs4=1,Fsy=1
(11)
2)另一方向点火策略
若k≥200,Fsp=1,Fsy=0,DHP≤Δμ,C2(k)≥0,则:
Fs2=1,Fs4=0,Fsy=1
(12)
若k≥200,Fsp=1,Fsy=0,DHP≤Δμ,C2(k)<0,则:
Fs2=0,Fs4=1,Fsy=1
(13)
若k≥200,Fsp=0,Fsy=1,DHP≤Δμ,C1(k)≥0,则:
Fs1=1,Fs3=0,Fsp=1;
(14)
若k≥200,Fsp=0,Fsy=1,DHP≤Δμ,C1(k)<0,则:
Fs1=0,Fs3=1,Fsp=1
(15)
3)俯仰通道转弯结束判定
若k≥200,Fsp=1,|C1(k)|≤0.95°,Fs1+Fs3=1,则:Fs1=1,Fs3=1
(16)
4)偏航通道转弯结束判定
若k≥200,Fsy=1,|C2(k)|≤0.95°,Fs2+Fs4=1,则:Fs2=1,Fs4=1
(17)
若t>30,则:
(18)
式中:Fsi(i=1,2,3,4)为i号发动机点火标志,俯仰、偏航方向点火标志初值都为0,Δμ=0.001。
3 仿真分析
假设弹载惯性装置敏感弹体相对发射系初始姿态为ϑ=90°、ψ=0°、γ=0°,弹体出筒时的速度为11.7 m/s,出筒扰动为[ωx0,ωy0,ωz0]=[0,0,-57.3°/s],地面测量装置测量目标相对发射系空间方位为ϑc=10°、ψc=10° ,调姿脉冲发动机收到点火指令后产生一个瞬时力,忽略发动机点火延迟。
利用Matlab中Simulink模块搭建弹体六自由度方程并进行仿真。
绘制姿态控制脉冲发动机工作时序如图4、图5所示,从图中可以看出发动机点火顺序为3、4、1、2号发动机,首先是3号发动机点火产生俯仰方向低头力矩,然后是4号发动机点火产生偏航正向力矩,最后是1、2号发动机点火产生止动力矩。比较图4和图5发现,没定义新弹体系的仿真结果是1、2号止动发动机点火时间间隔47 ms,而定义新弹体系的仿真结果是1、2号止动发动机几乎同时点火。
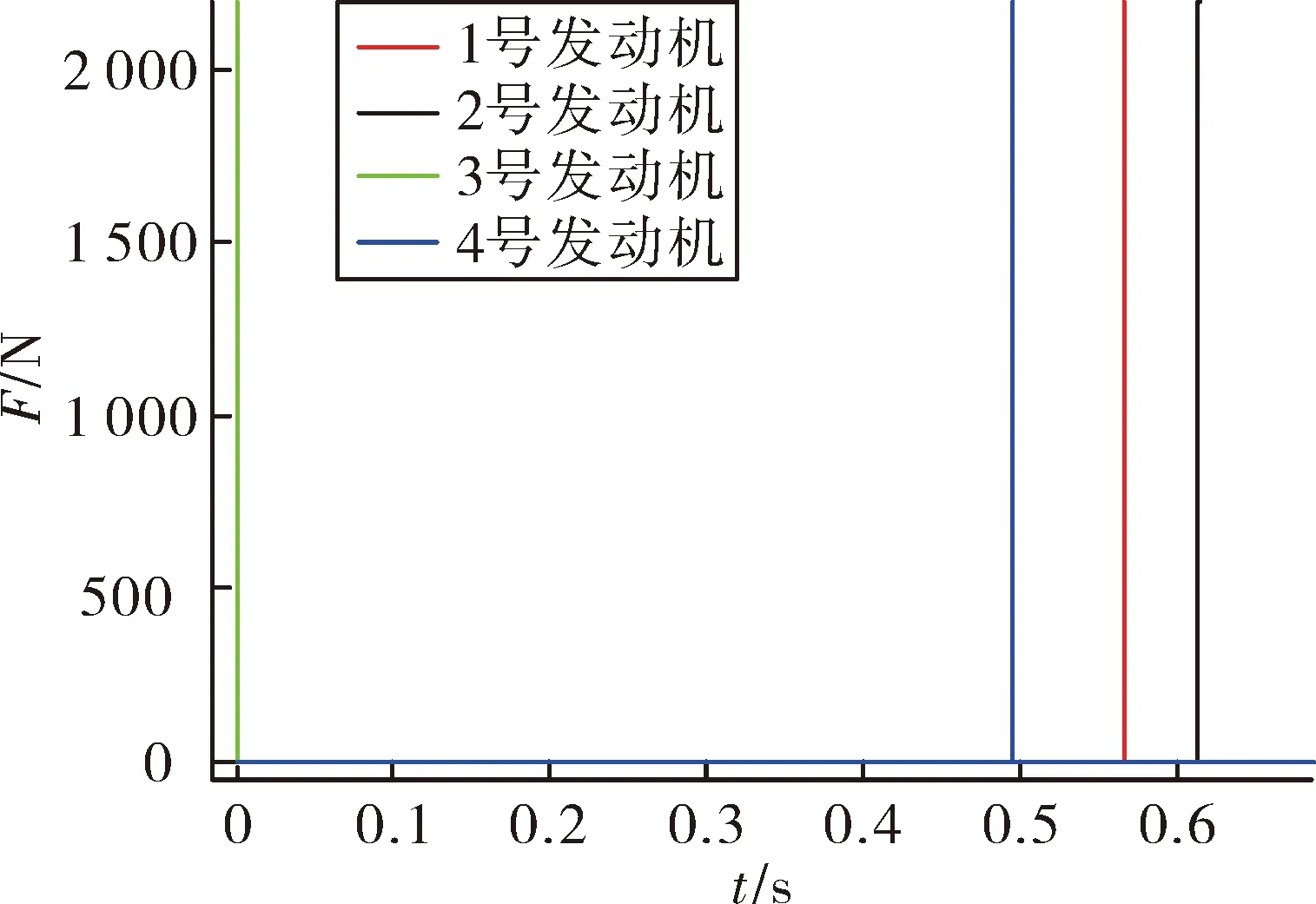
图4 不定义新弹体系的调姿脉冲发动机工作时序
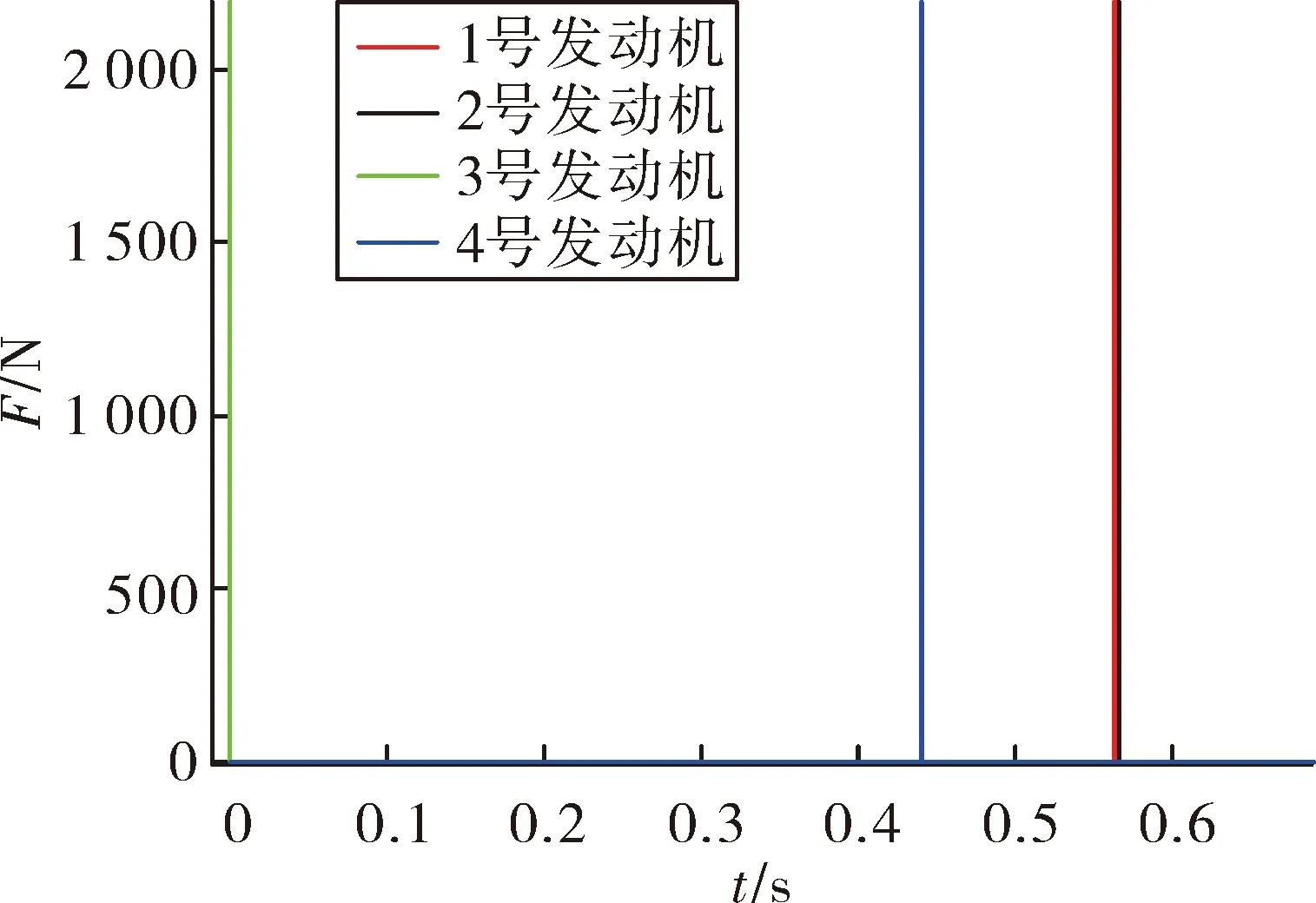
图5 定义新弹体系的调姿脉冲发动机工作时序
绘制弹体姿态角速度曲线如图6、图7所示,从图中可以看出弹体姿态角速度变化符合发动机点火时序。调姿发动机工作结束后,炮口扰动姿态角速率依旧存在,并不能被消除,所以需要考虑炮口扰动,尽量使俯仰和偏航角同时到达空间指定值。
图6 不定义新弹体系的弹体姿态角速度曲线
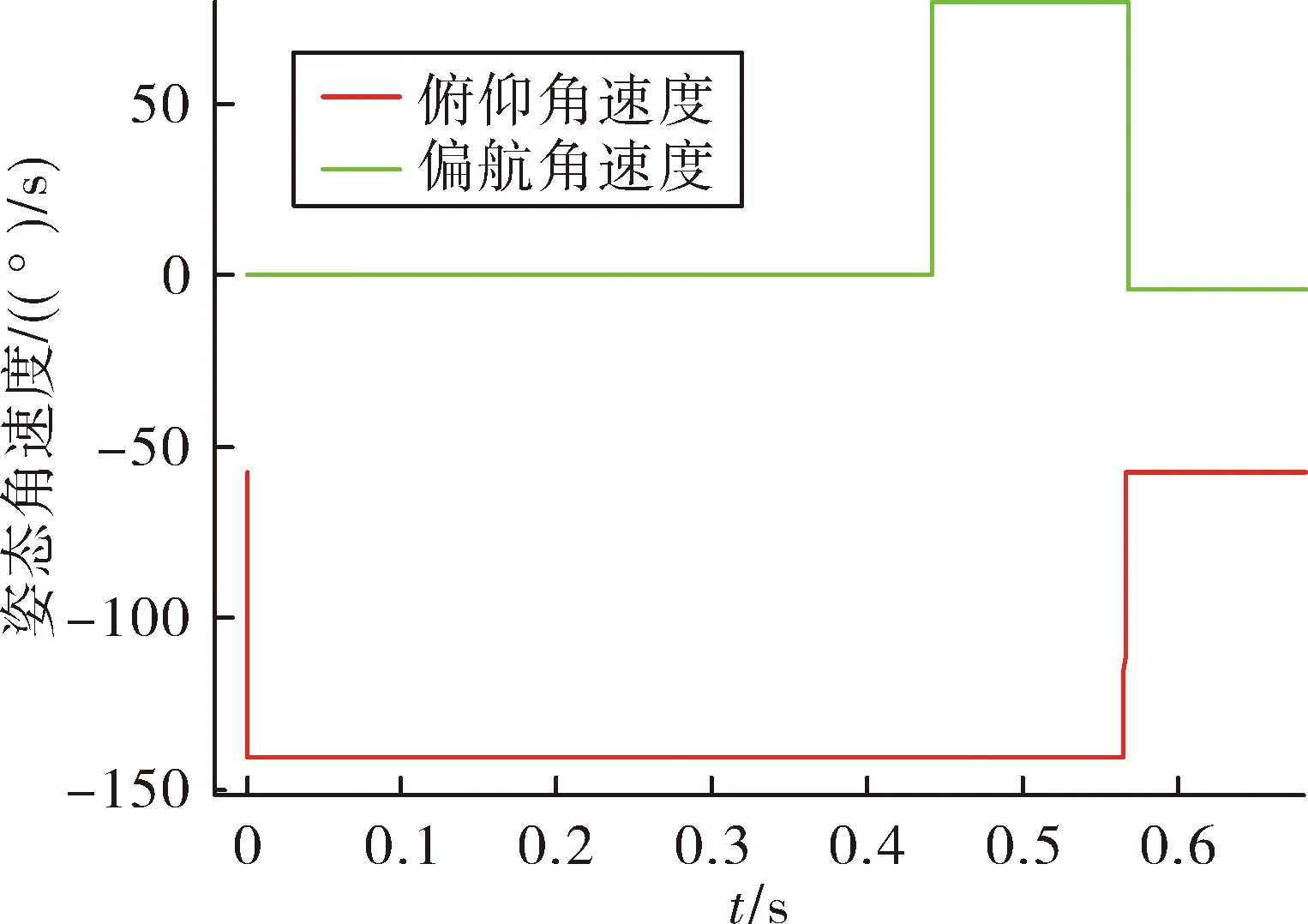
图7 定义新弹体系的弹体姿态角速度曲线
绘制弹体姿态角如图8、图9所示,从图中可以看出弹体初始俯仰、偏航姿态角分别为90°、0°,随后在控制作用下俯仰角减小,当控制角减小到一定值后偏航角在控制作用下开始增加。不定义新弹体系方案,俯仰先到达指定值,47 ms后偏航角到达指定值,而此时由于炮口扰动俯仰角变化为7.5°,比指定值小了2.5°,此时如果旋转推进发动机点火,将会在俯仰方向产生较大的误差;定义新弹体系的方案,当t=565 ms时,俯仰和偏航角几乎同时到达惯性空间指定的方位,因此可以实现存在较大炮口扰动时的弹体姿态准确控制。
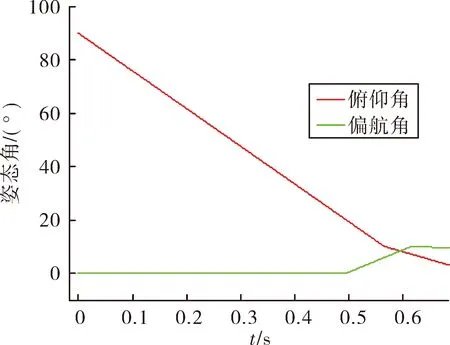
图8 不定义新弹体系的弹体姿态角曲线
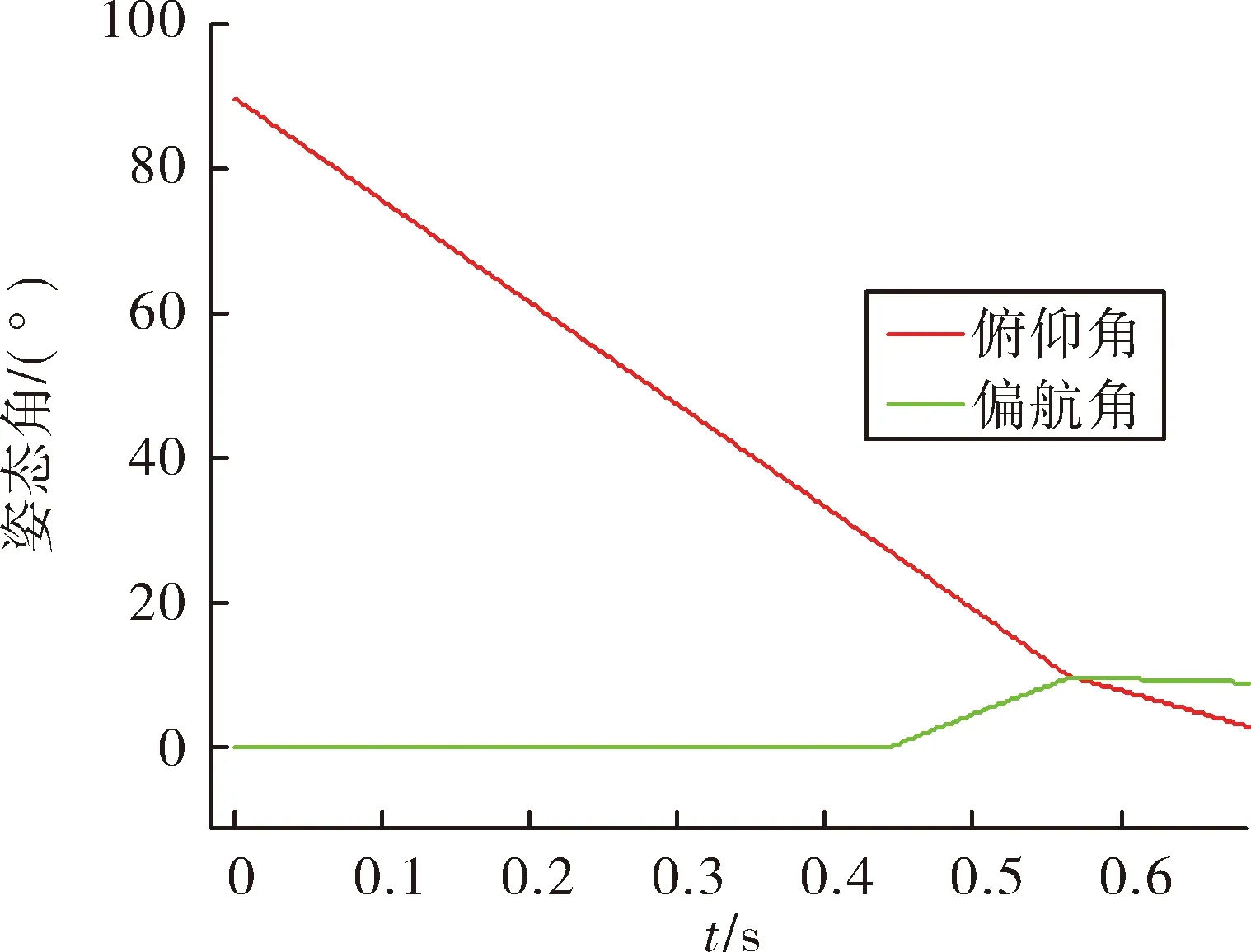
图9 定义新弹体系的弹体姿态角曲线
仿真结果验证了文中研究调姿控制方法的有效性。
4 结论
文中针对某垂直发射弹药采用脉冲调姿发动机进行转弯的控制方法进行了研究,尤其当初始扰动较大时,为避免扰动对姿态控制精度的影响,定义了新的弹体坐标系,通过将空间方位投影到新弹体坐标系,计算控制误差,并通过逻辑运算得到4个脉冲发动机点火指令。通过仿真验证,比未定义新坐标系的方法在抗初始扰动方面有显著优势。
