基于ADAMS的无人机空中发射动力学仿真及分析*
2020-09-01张少江童小燕姚磊江
张少江,童小燕,姚磊江 ,张 伟
(1 西北工业大学无人机特种技术国防科技重点实验室, 西安 710072; 2 西北工业大学航空学院, 西安 710072)
0 引言
无人机空中发射技术是指利用其它载体平台(飞机、导弹等)将无人机携带至空中,利用载体平台本身的飞行速度实现无人机与载体的分离以及无人机的自主飞行[1-2]。空中发射这一技术可以达到扩大作战半径以及实现高机动发射无人机的目的。
与现有的发射方式相比,空中发射具有发射时间短、响应速度快、发射效率高和隐身性能好等一系列优点。且空中发射蜂群无人机的效果更加突出。因此,世界各国都在积极努力研制相应的无人机空中发射技术。2014年11月7日,DARPA发布“分布式机载能力”信息征询书,对大型运输机/轰炸机发射回收无人机的可行性展开评估。DARPA希望开展相关概念验证,并计划引入此前“自主高空加油”(AHR)和“战术侦察节点”(TERN)等项目成果,由此诞生“小精灵”(Gremlins)项目[3]。
基于多体系统动力学理论,将无人机与发射系统都简化为多刚体系统,联合应用CATIA、ADAMAS建立载机模型、无人机模型以及发射系统模型,对无人机的发射过程进行动力学仿真,并分析了空中发射方案的可行性。
1 无人机空中发射系统
无人机空中发射系统如图1所示。按照其结构特点可以分为旋转发射架和无人机两大部分。发射架主要由发射支架、旋转机构、旋转轴组成,发射支架是整个发射系统的主要承力构件,旋转机构可以在旋转轴上进行旋转。
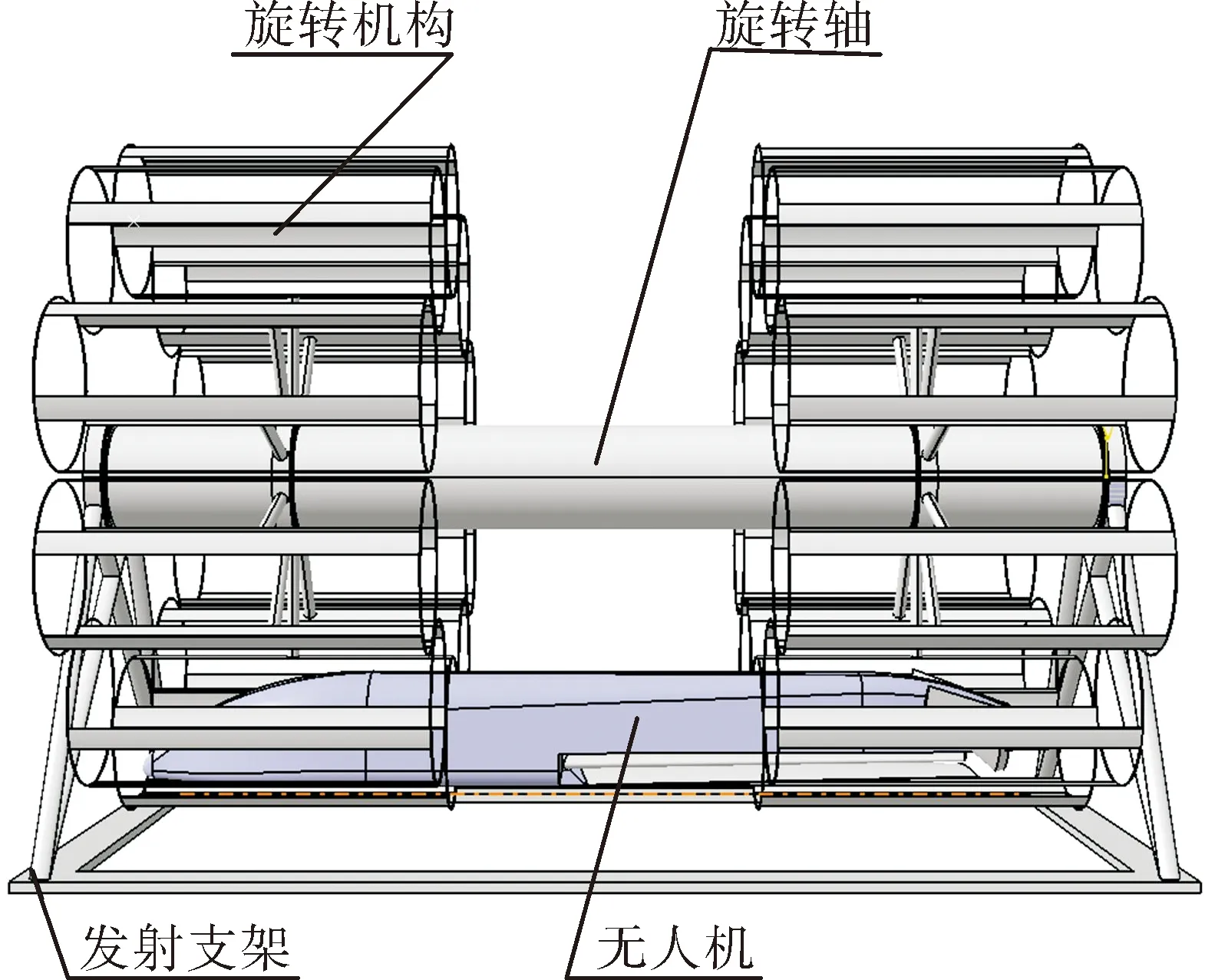
图1 无人机空中发射系统组成图
发射方式为旋转式间歇发射,发射位置位于发射架中心最低位置处,第一架无人机发射完成后,旋转机构旋转36°,再将第二架发射出去。
2 仿真模型
2.1 模型的假设
为了问题研究的需要,以下的仿真分析都是基于下面的假设进行的[6]:
1)将无人机和发射架作为刚体,在运动过程中,形状、质量、质心都不发生改变;
2)忽略振动问题,对无人机和发射架以及载机间的振动不予考虑。
2.2 导入模型及添加约束
将无人机、发射架以及载机在CATIA中装配为一个整体后,导入ADAMS中,在ADAMS中对模型进行简化处理,建立动力学仿真模型。将载机、无人机以及发射架均作为刚体处理。添加约束条件, 将发射架与载机作为一个整体,假设其不可动,用固定副连接;旋转机构与发射架之间有旋转关系,是旋转机构绕旋转轴旋转,用旋转副连接;无人机相对于发射架以及载机有移动关系,用移动副连接。
初步设计时,载机飞行高度为3 km,速度为102 m/s,无人机发射方式采用弹射发射。根据文中研究重点,假设仿真过程中载机固定不动,只有发射架的旋转运动和无人机的分离运动。
2.3 建立空中发射动力学方程
1)多体系统动力学的建模方法
多体系统动力学研究问题的难点之一便是建模方法。从20世纪60年代以来,对于多刚体系统,航天和机械两大工程领域分别根据各自所研究的对象特点提出了两种不同的建模方法,但主要区别在于对刚体位形的描述上。
航天工程领域[5]将系统内每个铰链所连接的一对刚体作为一个单元,将其中一个刚体作为参考体,另一个刚体相对于此参考体的位形由铰链的拉格朗日坐标(即广义坐标)来表述。这样整个树系统的位形就可以由所有铰链的拉格朗日坐标矩阵q决定。整个系统的动力学方程为拉氏坐标矩阵的二阶微分方程组,即:
这种建模方法的优势是方程个数极少, 但缺点也非常明显,方程组中的方程都是严重的非线性方程,A和B矩阵的形式也非常复杂,在对其整个方程组进行程式化时需要包括表示系统拓扑的信息。而对于非树形系统,对约束方程需要求解。在约束反力需要求解出的系统中,这种形式反而具有局限性。一般将这种建模方法称为第一类方法。
机械工程领域[4]是将系统中的每一个零件作为一个单元,在每个刚体上建立固连在其上的坐标系,则刚体的所有位形均可以相对于一个公共参考基来进行定义,位形坐标一般有6个,且都为刚体坐标系中基点的笛卡尔坐标与坐标系的姿态坐标。但整个系统中存在铰,则这些位形坐标通常都不独立,其整个系统的动力学方程形式通常为:

其中:φ为位形坐标矩阵q的约束方程;φq为约束方程的雅克比矩阵,λ为拉氏乘子。
上式是一个维数非常巨大的代数-微分混合方程组。但在一般情况下,方程组系数矩阵零元素都比较多,所以矩阵一般都具有稀疏性。在计算时可以利用其矩阵呈现稀疏性的特点进行简化后的数值计算,从而可以大大提高计算效率。一般把此种建模方法称为第二类方法。
2)动力学方程的建立
在动力学仿真软件ADAMS的建模中,一般采用的是第二种方法。将每个刚体i的质心笛卡尔坐标和表示刚体方位的欧拉角(或广义欧拉角)作为广义坐标,即:
采用拉格朗日乘子法建立系统运动方程:

完整约束方程时:f(q,t)=0

3 空中发射仿真结果与分析
在ADAMS/View中建立约束,添加各种连接。给予无人机一个初始速度,并验证模型正确性。在ADAMS中建立测量,本次测量主要包括无人机质心的位移以及无人机机头顶点与载机货舱下舱面之间的距离。本次仿真,结束时间为5 s,仿真步数为500。
3.1 无人机空中发射仿真结果
本次仿真方案中,无人机空中发射时无人机与载机的分离运动可以简化看作是类平抛运动,在仿真中做简化处理,给无人机x向初速度为35 m/s,其余方向速度分量为0,让其只受重力完成仿真过程。其具体仿真的测量结果如图2~图4所示。
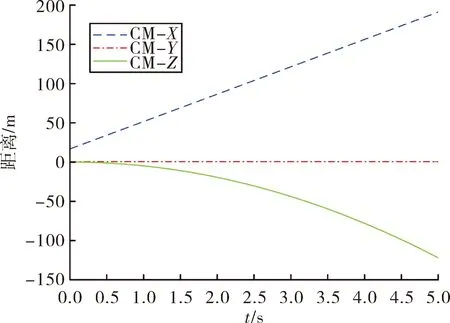
图2 无人机质心位移曲线

图3 无人机机头顶点到货舱舱面垂直距离变化曲线
3.2 仿真分析
从仿真结果来看,无人机出载机货舱过程中无人机机头顶点与载机货舱下舱面均在安全范围之内,无人机在0.19 s出舱,而图4与零线交点在0.196 s,此时无人机已经安全出舱,故无人机不会与载机货舱或者辅助货桥等设备发生碰撞,从仿真动画也可以验证此点。因此无人机可以安全与载机分离。

图4 图3前0.2 s细节图
4 结论
利用三维建模软件CATIA联合动力学仿真软件ADAMS建立了载机、无人机和旋转发射架的虚拟样机模型,并对无人机和载机的分离过程进行了动力学仿真分析。在假设的初始条件下,无人机可以安全与载机分离。仿真结果表明:这种内装式的无人机空中发射方案不仅可以实现无人机与载机的可靠、安全分离,而且为大型运输机空中发射无人机和空中发射蜂群无人机的总体方案的可行性论证提供了重要的论证依据。
