基于改进人工势场法的反辐射无人机搜索航路规划*
2020-09-01刘培宾盛怀洁
刘培宾,盛怀洁
(国防科技大学电子对抗学院, 合肥 230037)
0 引言
反辐射无人机(以下简称无人机)具有“发射后不管”的特点,其搜索航路规划属于预先航路规划,实时性较差,因此在地面阶段进行的搜索航路规划对提高其对目标雷达的搜索压制效率至关重要。搜索航路规划的关键在于选择合适的航路规划算法,人工势场法自1986年被Khatib[1]提出以来,由于原理简单、规划效率高、生成路径平滑等优点被广泛应用于无人机的航路规划领域,如文献[2]将人工势场法用于无人机的局部航路重规划,文献[3-4]将人工势场法应用于多无人机的航路规划。但是传统人工势场法也存在许多固有的问题,比如容易陷入局部极小点,存在目标不可达问题[5],在狭窄区域易发生路径抖动[6]以及在复杂环境中无法准确避障[7]等问题。针对这些问题,研究人员通过对传统算法进行改进,提出了许多行之有效的解决方法,如修改势场函数[8]、在搜索过程中加入随机逃走[9]等策略以及与其它算法相结合[10]等。
为提高无人机对目标雷达的搜索压制效率,文中以无人机导引头具有视场约束的特点为切入点,提出了一种基于改进人工势场法的搜索航路规划方法。
1 搜索航路规划问题概述
文中无人机搜索航路规划问题主要包括约束条件、代价指标等要素,其一般可描述为:在指定搜索区域内,利用改进人工势场法,规划出满足一系列约束条件的使航路规划代价指标(“视场覆盖率”)最大的闭合航路,使目标雷达尽可能处于无人机导引头的搜索视场范围内。
搜索航路规划基于分层规划思想。
1.1 分层规划思想
根据无人机“发射后不管”以及导引头具有搜索视场约束的特点,将搜索航路规划划分为两个层次进行:第一层是整体航路规划,第二层是航路局部优化。
1)整体航路规划
整体航路规划是在搜索算法运行之前进行的,将搜索航路规划问题类比为旅行商问题,从任务执行效率等方面考虑,选择关键航路节点,合理安排各个航路节点的到达顺序,实现航路闭合,以便引导无人机更好地对目标雷达实现视场覆盖。
关键航路节点按以下原则选取:
①所选航路节点位于攻击区(搜索航路规划区域)内;
②数目至少为2个,但不宜过多;
③保证导引头搜索波束在地面上的投影尽可能覆盖目标雷达。
2)航路局部优化
有了关键航路节点后,无人机在关键航路节点之间,依据威胁信息以及视场约束条件,基于改进人工势场法,增加航路节点,对搜索航路进行局部优化。
1.2 航路约束条件
无人机搜索航路规划不仅要兼顾可飞性、安全性等因素,更要满足任务执行需要。其中可飞性主要指无人机要满足基本飞行性能的约束,如最小平飞距离、最小转弯半径、最大转弯角等;安全性主要指无人机在飞行时不仅要避开高山等地形障碍,还要规避敌方高炮、地空导弹等威胁;任务执行需要目标雷达尽可能处于无人机导引头的搜索视场覆盖范围内。
1.3 航路代价指标
无人机主要用于执行对敌防空系统的搜索压制任务,所以在进行航路规划时主要考虑任务执行需要。
一般,无人机被动雷达导引头在水平面的方位覆盖角度为±φ0,在垂直面的俯仰覆盖角度范围为β1~β2。导引头在水平面成功截获雷达信号的约束条件是:
(1)
式中:Xi为无人机当前的位置;Xi+1为无人机下一时刻的位置;X0为目标雷达的位置。
由于无人机在搜索航段大部分时间是按照某固定高度水平飞行,因此可以将俯仰方向的角度约束条件转化为距离约束条件,即
(2)
式中:dmin、dmax分别为考虑俯仰最小覆盖角度β1时的无人机与雷达之间的最小水平约束距离和综合考虑俯仰最大覆盖角度β2和导引头接收灵敏度时的最大水平约束距离。
式(1)和式(2)即为搜索航路规划的任务约束条件。
最后,定义“视场覆盖率”W这一航路代价指标作为改进人工势场法的适应度函数,来衡量无人机对目标雷达的搜索压制效果,即
(3)
式中:M表示规划的搜索航路中航路段的总个数;N表示导引头视场覆盖目标雷达航路段个数,航路段为航路中相邻两航程点组成的线段;Lf(i)表示视场覆盖航路中第i段航路的长度;L(j)表示第j段航路的长度。
2 基于改进人工势场法的搜索航路规划
改进人工势场法主要通过修改斥力势场函数来解决目标不可达问题,以及通过引入遗传算法进行势场函数参数优化来克服势场函数参数人为选取的随机性。
2.1 改进势场函数模型
引力场势场函数模型为:
(4)
式中:ρ(X,Xg)为无人机与目标点的距离;k为引力增益系数。
相应吸引力是引力场势场函数的负梯度:
Fatt(X)=-(Uatt(X))=kρ(Xg,X)
(5)
改进斥力场函数模型为:
(6)
式中:ρ(X,X0)为无人机与障碍之间的距离;ρ0为障碍的影响距离;η为斥力增益系数。
相应排斥力是斥力场势场函数的负梯度:
Frep(X)=-
(7)
式中:
(8)
则无人机受到的合势场及合力分别为:
U(X)=Uatt(X)+Urep(X)
(9)
F(X)=-(U(X))=Fatt(X)+Frep(X)
(10)
于是,无人机在人工势场合力F(X)的作用下,向着目标点的方向移动。
式(6)的改进斥力场函数模型中增加了调节因子ρ2(X,Xg),使无人机当靠近目标点的时候,在吸引力减小的同时,排斥力随之减小,直到无人机到达目标点,吸引力和排斥力减至零,从而可以解决传统人工势场法中,在障碍物与目标点过于接近引起的斥力势场和引力势场同时增大而出现的目标不可达问题。
势场函数确定后,下一步需要根据实际情况合理设置势场函数参数的数值,使合力函数引导无人机成功避障到达目标点。为克服势场函数参数人为选取的随机性,文中利用遗传算法来对势场函数参数进行优化来寻求全局最优解,实现成功避障、目标可达。
2.2 基于遗传算法的参数优化
利用遗传算法进行参数优化时,主要对以下步骤进行改进:
1)染色体编码。染色体编码就是将问题的有效解表示出来,这里选择引力增益系数k、斥力增益系数η、障碍物的影响距离ρ0、移动步长γ(设定无人机匀速前进)4个参数按顺序编成一个数组作为一个染色体,即
xi=(xi1,xi2,xi3,xi4)
(11)
式中:xi1=k,xi2=η,xi3=ρ0,xi4=γ,i=1,2,…,n,n为种群规模。
2)适应度函数计算。适应度函数计算是确定不同染色体即可行解优劣程度的关键,也是基于遗传算法参数优化的核心,可以根据不同的任务要求设置不同的适应度函数。
2.3 改进人工势场法算法步骤
基于改进人工势场法的搜索航路规划算法步骤为:
步骤1 仿真参数初始化;
步骤2 染色体编码;
步骤3 产生初始种群;
步骤4 调用人工势场算法根据式(10)的合力函数产生n条从起点到终点的满足约束条件的航路,并根据式(3)计算每条航路的适应度函数;
步骤5 选择适应度高的染色体,交叉、变异产生新种群;
步骤6 循环操作步骤5,直到代数满足设定的最大遗传代数Gmax;
步骤7 算法结束,输出搜索航路。
3 仿真实验
3.1 改进人工势场法
首先验证改进人工势场法的正确性。
仿真环境设置:航路起点为(0,0),终点为(10,6),规划空间中有8个圆形障碍,以路径最短为航路优化指标。
实验一:k=42,η=100,ρ0=3,γ=1 ,传统人工势场法仿真结果如图1,基于改进势场模型的人工势场法仿真结果如图2。
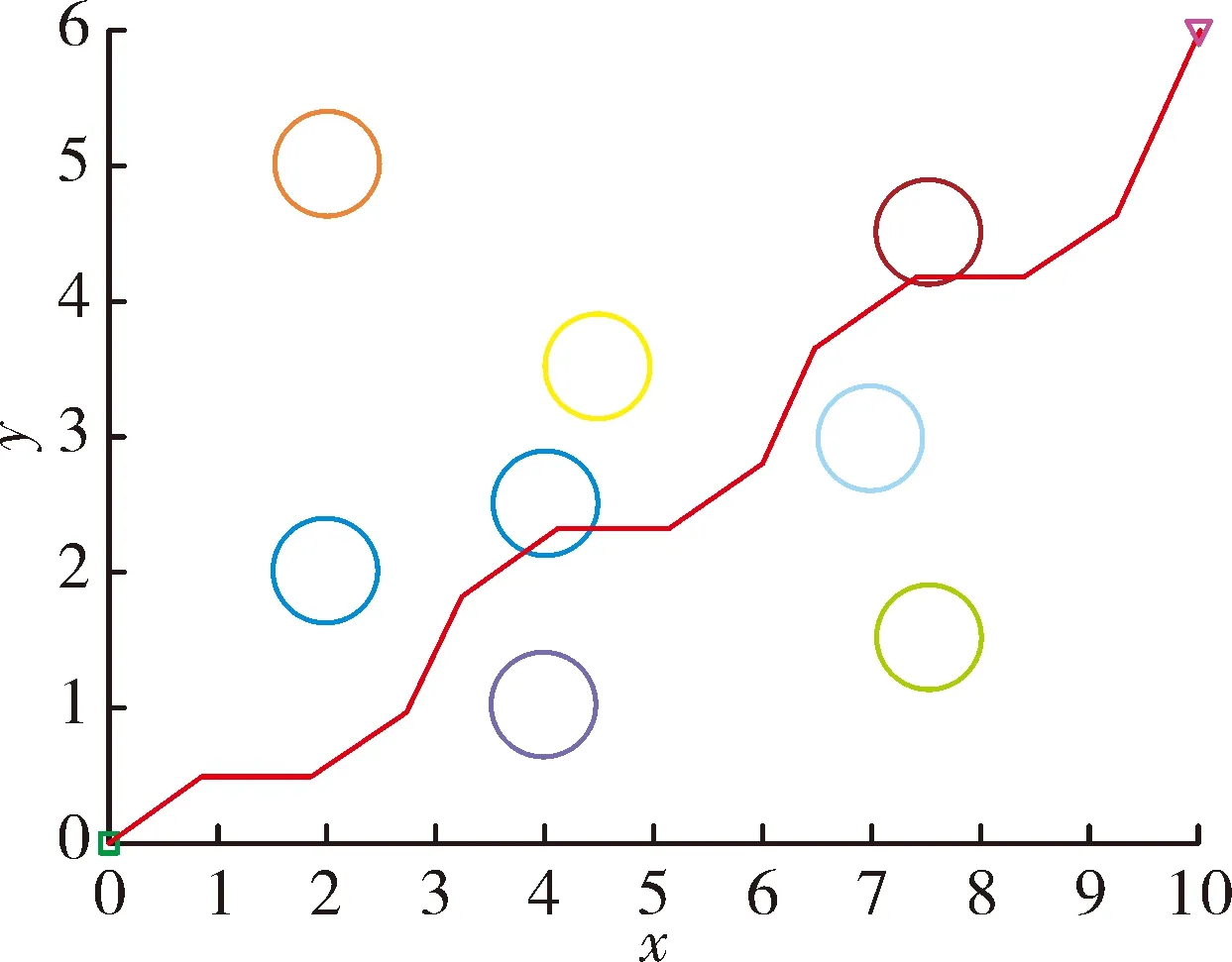
图2 基于改进势场模型的人工势场法航路规划
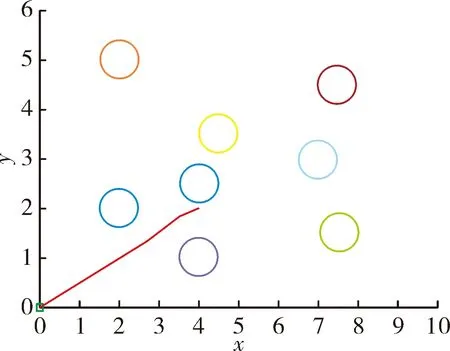
图1 基于传统人工势场法航路规划
实验二:种群规模n=200,交叉概率pc=0.7,变异概率pm=0.3,Gmax=50,基于遗传算法参数优化的改进人工势场法仿真结果如图3。
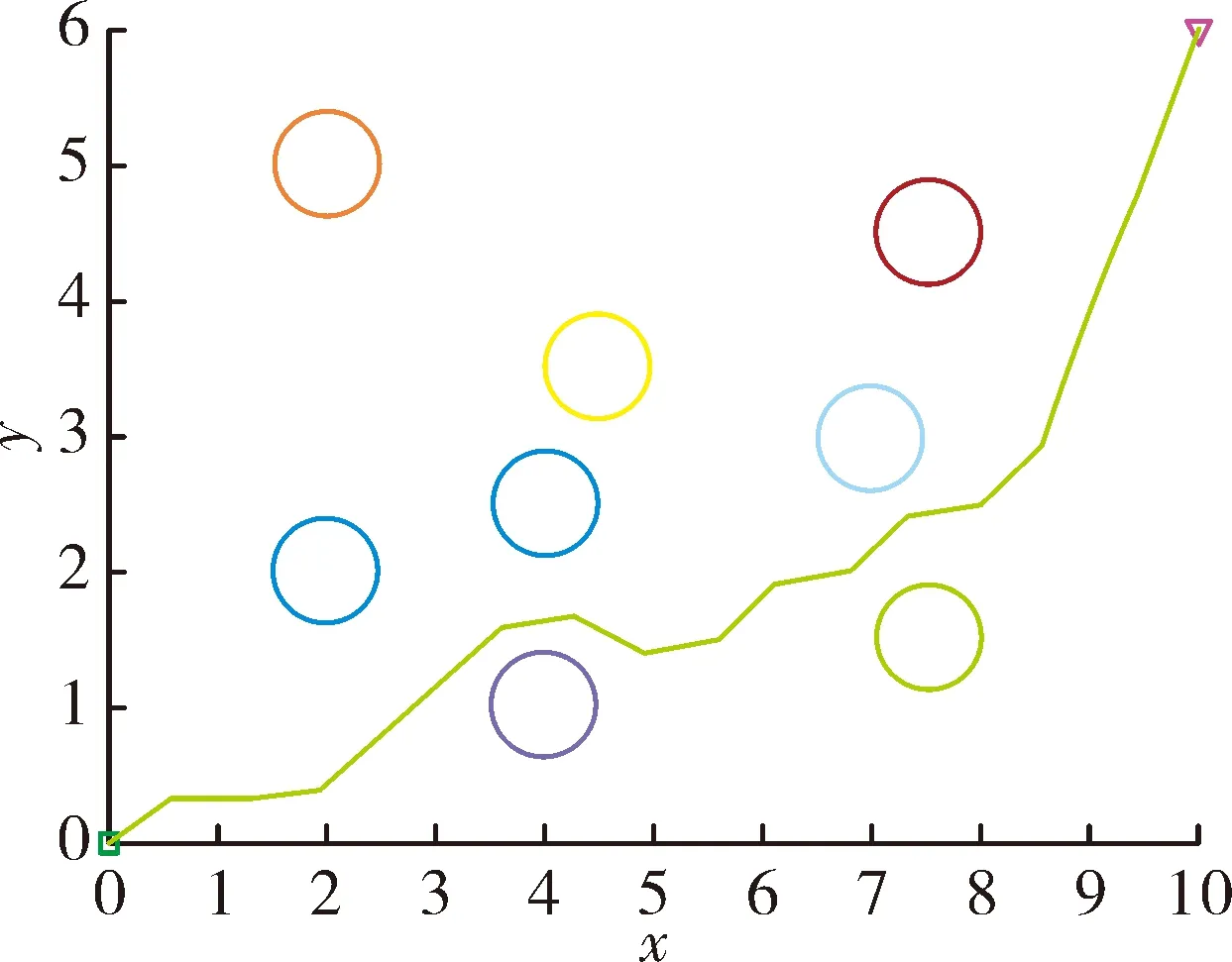
图3 基于遗传算法参数优化的改进人工势场法航路规划
从仿真结果看,传统人工势场法在复杂的环境下存在目标不可达的现象,基于改进势场函数模型的人工势场法虽然目标可达,但是由于势场函数参数选择不当导致无法准确避障,而基于遗传算法参数优化的改进人工势场法不仅目标可达而且准确避障,从而验证了改进人工势场法的正确性,下面将该算法应用于无人机的搜索航路规划中。
3.2 基于改进人工势场法的搜索航路规划
接下来基于分层规划思想,利用改进人工势场法进行无人机的搜索航路规划。
仿真环境设置:仿真在12×12的环境中进行,作战目标为位置固定的单目标雷达,坐标为(5,5),规划区中有4个圆形禁飞区。
被动雷达导引头参数:φ0=π/3,dmin=1,dmax≫12;遗传算法参数:n=200,pc=0.9,pm=0.05,Gmax=50。由于在计算视场覆盖率W时,移动步长γ越小,计算结果越精细,故采用无人机的最小平飞距离作为移动步长,这里取γ=0.5,遗传算法只对k、η、ρ0进行优化。
仿真根据1.1的分层规划思想分为两步进行,第一步整体航路规划,即选择关键航路节点,此次仿真实验选择(0,6),(8,6)两个关键航路节点,此时闭合航路为(0,6)→(8,6)→(0,6);接下来进行第二步航路局部优化,首先生成(0,6)→(8,6)航段的搜索航线,如图4,其W1=4/8.006 3=49.96%;最后生成(8,6)→(0,6)航段的搜索航线,如图5,其W2=13.633 5/24.012 2=56.78%;则整体搜索航路视场覆盖率W=55.07%。
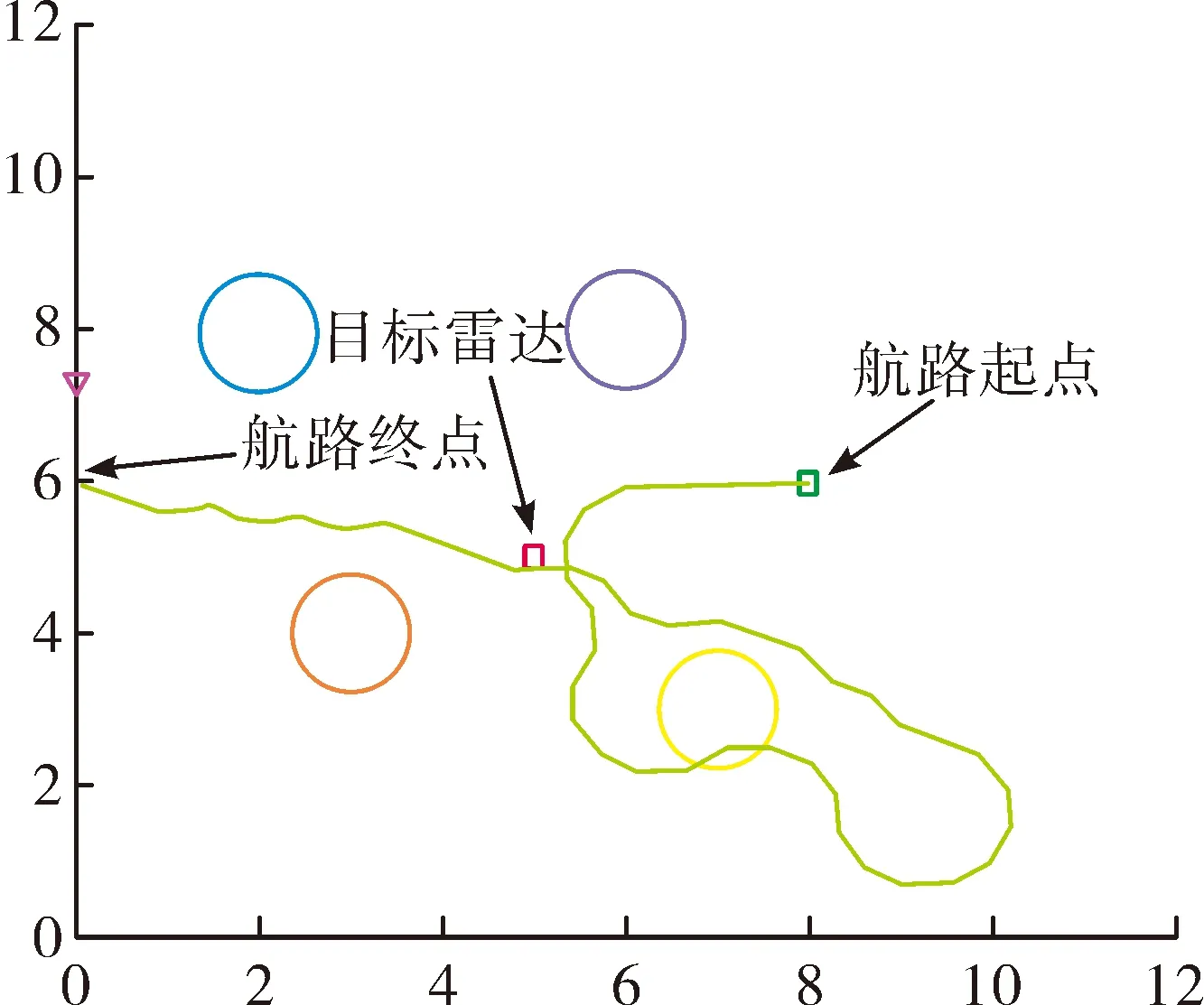
图5 (8,6)→(0,6)航段的搜索航线
从搜索航路规划结果来看,运用改进人工势场法进行无人机的搜索航路规划,不仅能够准确避开禁飞区,而且视场覆盖率远大于传统搜索航路的视场覆盖率(在规划空间大小相同的情况下,视场覆盖率均低于35%)[11]。此航路在满足可飞性、安全性等基本要求的前提下,能够实现对目标雷达较长时间的视场覆盖。
4 结束语
无人机的搜索航路规划是一个复杂的多约束性非线性优化问题,这要求规划出的搜索航路不仅安全、可飞,还要满足导引头搜索视场约束。针对此问题,文中基于分层规划思想,利用改进人工势场法进行搜索航路规划。其中改进人工势场法主要通过修改斥力势场函数来解决目标不可达问题,以及通过引入遗传算法进行势场函数参数优化来克服势场函数参数人为选取的随机性。仿真结果表明,基于改进人工势场法的搜索航路规划输出的搜索航路不仅安全、可飞,还能解决传统搜索航路视场覆盖率较低的问题,有助于提高无人机对目标雷达的搜索压制效率。
