港口集装箱起重机模拟训练系统设计
2020-08-31戴孟业郭小强黄大志
戴孟业 郭小强 黄大志


摘要:港口集装箱起重机模拟训练系统是一款适用于训练港口岸桥起重机操作和维护的实验设备,由电气控制系统、PLC控制系统、钢丝绳系统、视频定位系统及无线电磁铁系统等组成,主要以模拟重点作业设备(场桥、岸桥)的运行工况为基础,人为干预为外部条件,干预结果为研究对象,开展针对性设备工况及故障研究。各部位可人为制造故障,以培训、考核技术人员的操作技能,提高其实际维修保养设备的能力。
关键词:集装箱起重机;PLC控制;电气控制;模拟仿真
0 引言
经济全球化趋势下,国际贸易愈加频繁,港口起重机大型化发展速度越来越快。集装箱起重机(Container Crane)作为港口装卸货物的主要工具,主要由全数字化控制驱动装置、可编程序控制器、故障诊断及数据管理系统、数字化操纵给定检测等设备组成[1],其对港口的快速发展及装卸效率的提升起着重要作用。
港口大型起重机规格庞大,故障维修难度大、风险高、成本高,为了解决技术人员培训以及故障维修方面的难题,本文设计了一套港口集装箱起重机缩小比例(1:66)模拟训练系统,使技术人员能够熟悉起重机结构和工作原理,掌握集装箱起重机的实际操作方法,从而便于室内技术人员培训、故障排除等。
该设计集合了电气控制技术、PLC控制技术、计算机技术、起重机运动学与动力学等众多学科知识,基于电气控制系统、PLC控制系统、钢丝绳系统、视频定位系统及无线电磁铁系统,对核心控制系统与原系统相同的模拟训练控制系统进行设计与构建,同时运用SolidWorks软件对训练系统模型进行三维设计与搭建,并进行仿真模拟及可行性分析。最后在此基础上制作港口集装箱起重机模拟训练系统样机,并对其性能进行分析。
1 方案设计
该设计主要是在全面了解港口起重机的结构、运行原理和现场需求后,为了解决操作人员室内培训问题,进行的模拟训练系统的研究。港口起重机主要分为集装箱起重机、港口门座起重机、台架式起重机、固定式起重机等,本课题考察的是连云港40 t集装箱起重机。
集装箱起重机模拟训练系统构造包括动力移动系统、传动系统和全景视频定位辅助系统。动力移动系统由小车、大车、大臂、吊具等构成,系统的主要运动包括大小车的移动、吊具的升降和大臂的抬起、放下动作;小车移动距离为1 360 mm;大车在既定路径下,电机与减速机配合让大车保持稳定工作;大臂抬起角度为0°~85°;吊具可自由升降,跟随小车水平移动至既定位置。传动系统主要由齿轮、齿条、滑轮、钢丝绳组成。全景视频定位辅助系统包括4个摄像头,每个摄像头捕捉到的画面通过软件合成一个全景视图且无变形,最后呈现在工作台屏幕上,便于工人实时观察吊具的位置以及周围环境的变化,改善司机操作条件,保证作业安全,提高自动化控制程度和扩大远距离控制系统的使用范围[2]。
2 机械系统与模型设计分析
2.1 起重机模型结构初步设计
模型制作包括形体设计、比例设计、材料选购和表面处理等。起重机模型设计的主要参数:起重量61 kg,跨度0.45 m,起升高度1 m,起升速度1.2 m/min,小车运行速度v=1.2 m/min,大车运行速度Vdc=0.6 m/min,小车重量约0.65 kg,起重机模型质量约100 kg,模型总体外观尺寸为1 690 mm×460 mm×1 006 mm(长×宽×高),起重机基本结构如图1所示。
2.2 大车运行机构计算
已知起重机的起重量M=61 kg,桥架跨度L=0.45 m,大车运行速度Vdc=0.6 m/min,机构运行持续率为JC=25%,起重机的估计重量G=100 kg,小车的重量为Gxc=0.65 kg。
大车传动机构如图2所示。
通过选择轴承,分别计算空载和满载时的运行阻力矩,然后计算电动机的功率,根据功率进行选型,最后验算电动机的发热功率条件,确定电动机型号为2IK6GN-U。
3 电控及监控系统设计
3.1 主控制器设计
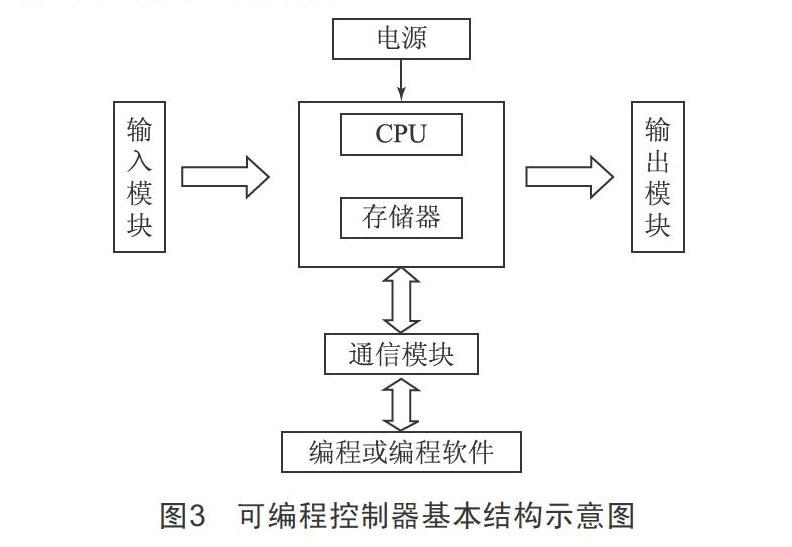
主控制器主要采用计算机结构,包括CPU、存储器、输入/输出接口及模块、通信接口及模块、编程器和电源[3]。可编程控制器基本结构如图3所示。
本系统采用Siemens的可编程控制器,型號为ES7312-1AE14-0AB0,采用Siemens的变频器,型号为V20,采用增量型的角度编码器,型号为E6B2-CWZ5B。
3.2 硬件电路和梯形图程序设计
本系统的输入口包括主回路启停、主令控制器各电动机启停、限位、故障输入、过电流保护、急停、复位等;输出口包括主电路电源、复位输出、急停输出、各电动机的电源、正反转和变频器输出、过电流保护输出等。
当PLC上电工作时,接通SM0.0,完成初始化。同时在总电路开关中,当接通启动开关I0.0,停止开关I0.1及闭合过电流保护开关I0.7常闭触头时,总电源输出开关Q0.0打开并自保持,整个电路将通电,等待启动相关按钮及其对应子程序[4]。
4 模拟训练系统模型仿真实验分析
4.1 机电系统联调
电机是一种含有耦合磁场、磁耦合电路,实现机电能量转换或传递的电磁装置。在绝大多数场合,集装箱起重机是以三相交流感应电机为动力源[5]。
在训练系统模拟实验平台中,采用6 W/380 V的微型交流电光轴电机作为大车、小车、悬臂梁和吊具的动力来源。集装箱起重机一次工作流程分为调试准备、开始作业、停止作业、结束。起重机吊具的额定载荷为610 N,吊具在上升与下降过程中受到重物的拉力,对受力地方进行应力分析,吊具受到的应力法向力大约为610 N。
4.2 模拟训练系统仿真
港口起重机工作循环周期如图4所示。
由图4可以看出,从T0~T12可以将工作过程分离出7种运动组合[6],分别为:起升加速阶段、加速起升和小车回程加速阶段、匀速起升和小车回程加速階段、匀速起升和小车匀速阶段、减速起升和小车回程匀速阶段、小车回程减速阶段、卸载阶段。
通过对起重机模拟训练系统载重工作状态、空载工作状态、停止工作状态下的模拟仿真以及部分动力学结构分析,进行了实际操作演示,对仿真结果进行了验证,证实了起重机理论分析的合理性[7]。
5 结论
港口集装箱起重机模拟训练系统设计是基于电气控制系统、PLC控制系统、钢丝绳系统、视频定位系统及无线电磁铁系统,对核心控制系统与原系统相同的模拟训练控制系统进行了设计与构建,同时运用SolidWorks软件对训练系统模型进行三维设计与搭建,并进行仿真模拟及可行性分析,取得了以下相应成果:
(1)制定出模拟系统的总体方案。根据大型起重机实际功能进行初步研究,确定了以1:66比例进行模型搭建,经过各种数据分析计算,制定出了一套模拟训练系统实物,经过仿真模拟实验,认定该方案可行。
(2)选定了驱动电机、控制装置等,通过PLC实验控制平台,实现了远程操控起重机工作。通过360°全景监控系统,实现了对大车、小车、吊具等的实时在线监测功能。
(3)通过检测系统,控制交流电机的转速,满足了大车、小车的速度调节和悬臂梁的角度监测需求,使起重机工作效率得到有效提升。
[参考文献]
[1] 王国利.起重运输机械发展趋势[J].中国水运,2005,12(3):42-43.
[2] 吴晓青.PLC控制的变频器调速系统在起重机的应用[D].广州:华南理工大学,2005.
[3] 张万忠,刘明芹.电器与PLC控制技术[M].2版.北京:化学工业出版社,2008.
[4] 陈伯时.电力拖动自动控制系统——运动控制系统[M].北京:机械工业出版社,2011.
[5] 张楠.浅析桥式起重机故障诊断及维修维护[J].中国设备工程,2017(18):84-85.
[6] 王金诺,张质文,程文明,等.起重机设计手册[M].北京:中国铁道出版社,1998.
[7] 邱进东.研究航空活塞发动机维修成本控制及其管理模式[J].内燃机与配件,2019(5):182-184.
收稿日期:2020-06-08
作者简介:戴孟业(1999—),男,江苏淮安人,研究方向:机械电子。
通信作者:黄大志(1977—),男,河南新野人,副教授,研究方向:增材制造。
