基于OpenCV的四自由度骨科打孔机器人设计
2020-08-09张美玉臧琛
张美玉 臧琛
摘要:本文设计了一种可根据骨科打孔手术的要求,基于OpenCV视觉定位的,可实现空间映射、路径规划、路径定位、定点打孔等4个方面的智能骨科打孔机器人模型,对其四自由度机械臂运动系统的结构方案进行了设计,讨论了该机械臂的运动结构,为机械臂的运动分析、控制及轨迹规划的研究提供了可靠的依据。
关键词:骨科机器人;四自由度;机械臂
中图分类号:TB文献标识码:Adoi:10.19311/j.cnki.16723198.2020.25.075
0引言
进入21世纪以来,受社会经济发展迅速、人口老齡化程度的加深的影响,我国医疗行业手术数量日益增高,需要手术治疗的患者日益增多。由于手术机器人在微创手术、精确定位操作等方面的优势以及其对传统医学促进的作用,手术机器人逐渐成为智能化医疗新技术的典范,也成为机器人研究领域的焦点之一。由手术机器人衍生出的骨科机器人也来逐渐成为骨科手术发展的新方向,催生了诸多新的治疗理念和方案。
传统骨科手术的核心难点在于受医生视野和操作的限制,手术损伤难以避免,且因手术操作难度较大,使其已不能完全适应时代发展需求,临床亟需新的治疗理念、手段和设备来满足骨科疾病治疗的需求。本论文设计的四自由度骨科打孔机器人模型在满足人们对精准、微创、智能需求的前提下基于OpenCV视觉定位进行手术路径规划和定位打孔,能完成包括空间映射、路径规划、路径定位、定点打孔等4个方面功能,简化其机械结构,从而成本更低、器材耐久性强、操作简单,具有很强的现实意义。
1系统结构与工作原理
基于OpenCV的四自由度智能骨科打孔机器人主要由机械系统、传感系统、控制系统三大系统构成,三大系统又分为六个部分分别为:一是驱动部分;二是视觉部分;三是机械结构部分;四是人机交互部分;五是手术计划部分;六是控制软件部分。
其工作原理是骨科打孔机器人利用空间映射建立三维坐标系,在视觉感知系统下自动从术前图像获取定位,建立手术器械、手术中图像和患者空间坐标的定位,结合医生拖动的粗定位和机器人自动的精确定位,实现安全准确的手术打孔定位,再通过路径规划将目标规划路径传递给机器人,在医生的监视下通过从操作方式或者以全自动的方式遥控机器人完成相应手术的操作。
2机械系统设计方案
2.1机器人的结构设计
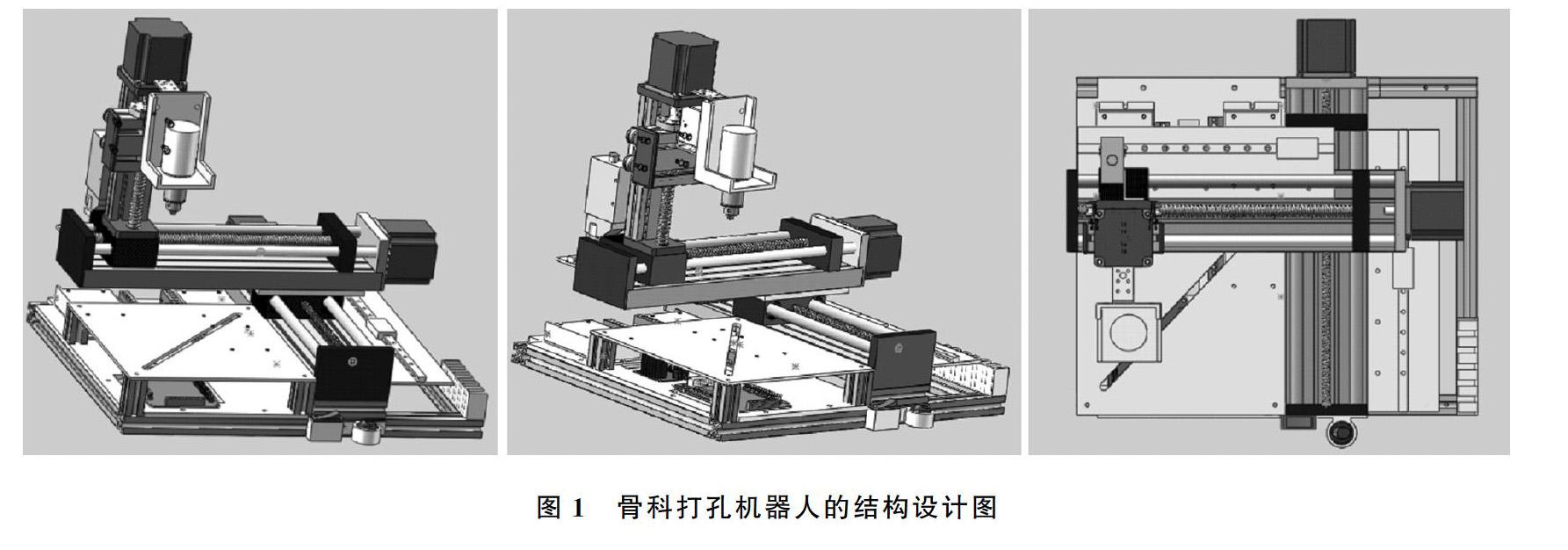
骨科打孔机器人的结构设计如图1所示。固定底板是整个机体的基础,上面设有框架结构的操作台、纵向水平支架、横向水平支架、垂直轴支架以及打孔装置,其中纵向水平支架、横向水平支架、垂直轴支架以及打孔装置共同构成了骨科打孔机器人的机械臂。
机器人机械臂通过固定底板上的纵向水平支架和横向水平支架进行水平方向两个直线方向的运动,机械臂上打孔装置的竖直运动能过安装在机械臂横向水平支架末端的垂直轴直架完成,每组水平和垂直运动构成机器人打孔装置的一个运动面。各运动面的移动旋转动力由三个步进电动机和一个舵机来提供,三个步进电动机可以为机器人的移动提供足够的动力,保证移动速度和精度,并且可以通过三个步进电动机的互相配合达到到达指定空间坐标位置的目的。为了便于医生进行粗定位,设计了框架结构的操作台以确定手术中手术者所处的位置,操作台上设有标尺,标尺共有两组标记点,在患处正、侧位图像采集时用于定位患处正、侧位的空间标记,以完成精确的空间定位。
2.2机械臂自由度的选择
机械臂支架除是骨科打孔机器人的整体支撑外,还主要用于调整骨科机器人打孔装置位置和姿态,使机器人打孔装置和患者患部处于同一个合理、精确的空间分布位置。因此,打孔装置的位置和姿态是机械臂末端执行的动作,因此骨科打孔机器人具备以下4个基本自由度:x轴方向的左右滑移、Y轴方向的前后滑移,Z轴方向的上下滑移,打孔装置(腕部)的转动。运动系统的结构组合式为:
这些自由度保证了机器人足够的灵活性,可以在空间坐标系内任意调整位置和姿态,便于手术操作的进行。
2.3机械臂的位置姿态
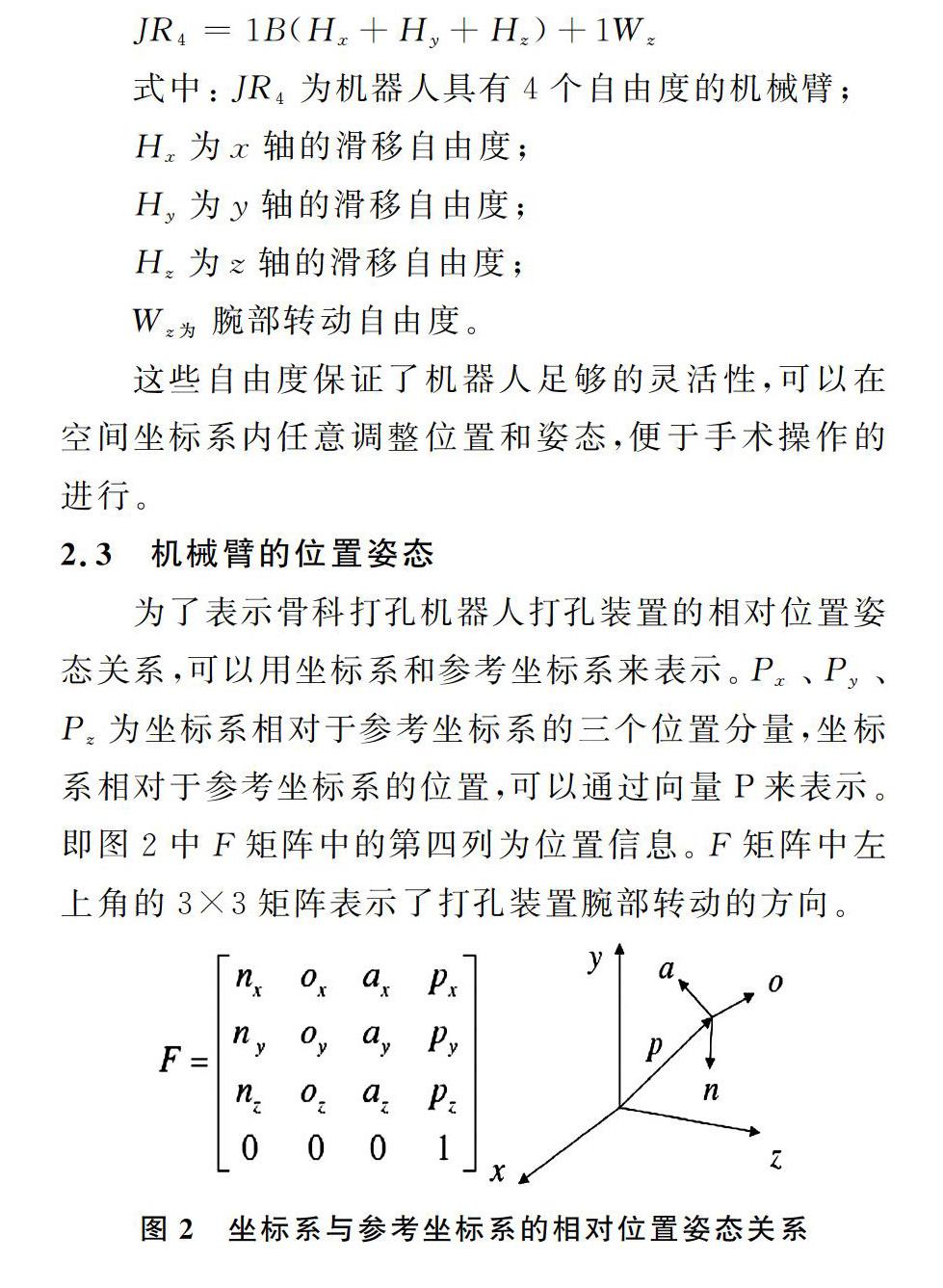
为了表示骨科打孔机器人打孔装置的相对位置姿态关系,可以用坐标系和参考坐标系来表示。Px、Py、Pz为坐标系相对于参考坐标系的三个位置分量,坐标系相对于参考坐标系的位置,可以通过向量P来表示。即图2中F矩阵中的第四列为位置信息。F矩阵中左上角的3×3矩阵表示了打孔装置腕部转动的方向。
3控制系统设计方案
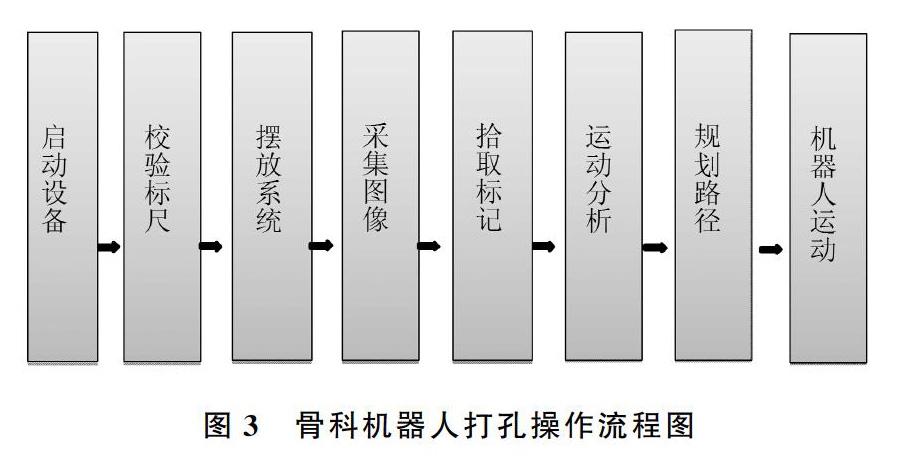
控制系统的设计主要分为两部分:一部分是机器人的“大脑”,它主要进行后台处理,负责完成图像采集、手术路径的计算和规划,并负责完成手术过程中导针的导航定位。另一部分是机器人的“手臂”,它是系统的执行部件,是一双可多维度移动的机械臂,“手臂”负责手术路径的最后输出。手术过程中“大脑”和“手臂”通过互相配合来辅助医生完成手术,主要结合了人机协同操作的想法,实现了主-从式操作骨科机器人的目标,即当机器人距离操作目标较远时,由医生拖动机械臂到达目标附近进行精定位,再由机械臂在小范围内进行高精度自主定位,显著提升了机器人的操作效率。骨科机器人打孔的内部工作流程如图3所示。
4结语
本文骨科打孔机器人的设计与制作本着降低成本、便于操作、易于控制的目的,对传统的骨科打孔机器人的结构与操作模式进行了创新,设计了四个自由度的机械臂,并通过OpenCV技术实现视觉精确定位和路径规划,并可以在手术前模拟仿真手术过程,具有良好的适应性与实用性,减少传统骨科手术医生操作安全性差的问题,减少医生操作时的精神压力,提高手术精度的问题,为现代化的骨科打孔手术提供了一个新的尝试的探索。
参考文献
[1]蔡佳成,吴海涛.基于四自由度的铝锭堆垛机械手的结构设计与运动学分析[J].机械制造,2014,52(03):2932.
[2]刘江南.四自由度机械手轨迹规划算法与应用研究[D].哈尔滨:哈尔滨工业大学,2015.
[3]田伟.骨科机器人研究进展[J].骨科临床与研究杂志,2016,1(01):5557.
[4]曾田勇.骨科机器人导航定位系统辅助股骨颈骨折空心螺钉内固定术的应用[J].中国医疗设备,2015,30(08):111113.