全自动运行系统下列车救援分析与决策
2020-07-31朱桐立
摘 要:全自动运行系统在城市轨道交通建设中已取得了广泛的推广,系统自动化水平的提升也给运营带来新的挑战,特别是因列车在区间内迫停后的救援处置,更是应急领域的研究重点。文章首先分析了全自动运行系统下列车救援的基本流程,进一步深化分析GoA4运行等级下,三种不同工况条件下救援策略的选择。针对无法直观进行策略选择的场景,该文基于动态规划理论,引入多阶段决策问题,提出了一种决策方法,并依据仿真案例进行详细分析。
关键词:全自动运行系统;列车救援;动态规划;多阶段决策
中图分类号:U283 文献标识码:A 文章编号:2096-4706(2020)04-0047-05
Abstract:The automatic operation system has been widely popularized in the construction of urban rail transit,and the improvement of the automation level of the system also brings new challenges to the operation,especially because the rescue and disposal of the train after the forced stop in the interval is the focus of the research in the field of emergency. First,this paper analyzes the basic flow of train rescue under the automatic operation system,and further deepens the analysis GoA4 the choice of rescue strategy under three different operating conditions under the operation grade. In view of the scenario which can not directly select the strategy,based on the dynamic programming theory,a multi-stage decision-making problem is introduced,and a decision-making method is proposed,and the simulation case is analyzed in detail.
Keywords:fully automatic operation system;train rescue;dynamic planning;multi-stage decision
0 引 言
国际公共交通协会(UITP)将列车运行的自动化等级(grades of automation,简称GoA)划分为5级,各等级简要说明如下。
(1)GoA0:目视下列车运行,司机负全责,无系统防护;
(2)GoA1:非自动列车运行(SCO),即ATP防护下的人工驾驶;
(3)GoA2:半自动列车运行(STO),即司机监督下的ATO驾驶;
(4)GoA3:有人值守下的列车自动运行(DTO);
(5)GoA4:无人值守下的列车自动运行(UTO)。
GoA3(DTO)和GoA4(UTO)统称为全自动运行系统[1](Fully Automatic Operation,简称FAO),已成为国际公认的主流发展方向之一,在国内外地铁建设也取得了突飞猛进的应用,国内如深圳地铁四期建设将全面采用全自动运行系统,预计2025年全球全自动运行线路将达2 300 km[2]。
系统自动化水平的提升,会使传统的人机功能得到重新分配,尤其是当地铁运营中出现紧急状况,相关人员、设备采取的应急处置会大有不同。由于在GoA4等级下列车上无司机这一特点,发生在区间内的应急场景无疑是对运营人员最具挑战性的一环,特别是因动力丢失等因素导致的列车区间迫停。因此,本文针对此场景对其救援策略进行深入研究。
1 FAO下列车救援策略分析
1.1 列车救援基本流程
当列车因严重故障无法行驶时,为了使故障列车行驶到维修区域,将人工驾驶救援列车救援故障列车。具体启动以下救援流程:
(1)救援列车首先进行清客作业,中心调度2名司机将救援车转为人工驾驶模式;
(2)司机驾驶救援车至故障车前30.0 m处,进行第一次停车,其中一名司机下车引导救援车,在距离5.0 m处再次停车,同时对车钩状态进行确认;
(3)继续人工引导,距离0.5 m时第三次停车,对准钩位后,以不超过3 km/h的速度进行撞击连挂;
(4)在确认故障车车体外指示灯为常亮,司机方可进入故障列车并进行模式转换;
(5)救援车进行试拉,故障车内的司机负责瞭望,其运行限速为30 km/h[3],救援成功,两列车返回正线存车线或场段。
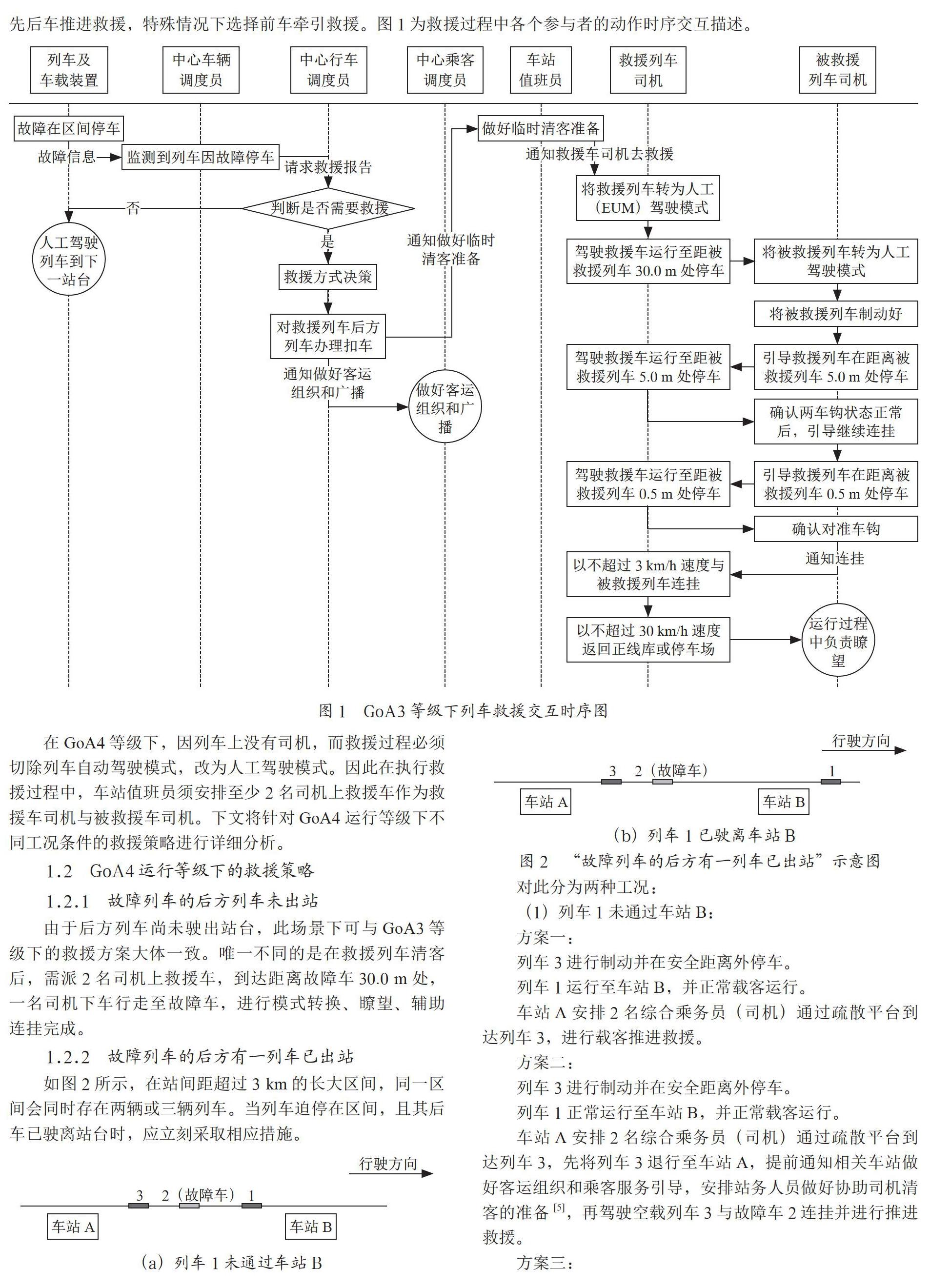
在GoA3等级下,因列车上设置司机,所以与GoA2运行等级下的救援策略往往没有差别,正线的列车在区间发生故障无法运行时,应首先遵循“顺向救援”的原则[4],即优先后车推进救援,特殊情况下选择前车牵引救援。图1为救援过程中各个参与者的动作時序交互描述。
在GoA4等级下,因列车上没有司机,而救援过程必须切除列车自动驾驶模式,改为人工驾驶模式。因此在执行救援过程中,车站值班员须安排至少2名司机上救援车作为救援车司机与被救援车司机。下文将针对GoA4运行等级下不同工况条件的救援策略进行详细分析。
1.2 GoA4运行等级下的救援策略
1.2.1 故障列车的后方列车未出站
由于后方列车尚未驶出站台,此场景下可与GoA3等级下的救援方案大体一致。唯一不同的是在救援列车清客后,需派2名司机上救援车,到达距离故障车30.0 m处,一名司机下车行走至故障车,进行模式转换、瞭望、辅助连挂完成。
1.2.2 故障列车的后方有一列车已出站
如图2所示,在站间距超过3 km的长大区间,同一区间会同时存在两辆或三辆列车。当列车迫停在区间,且其后车已驶离站台时,应立刻采取相应措施。
对此分为两种工况:
(1)列车1未通过车站B:
方案一:
列车3进行制动并在安全距离外停车。
列车1运行至车站B,并正常载客运行。
车站A安排2名综合乘务员(司机)通过疏散平台到达列车3,进行载客推进救援。
方案二:
列车3进行制动并在安全距离外停车。
列车1正常运行至车站B,并正常载客运行。
车站A安排2名综合乘务员(司机)通过疏散平台到达列车3,先将列车3退行至车站A,提前通知相关车站做好客运组织和乘客服务引导,安排站务人员做好协助司机清客的准备[5],再驾驶空载列车3与故障车2连挂并进行推进救援。
方案三:
列车3进行制动并在安全距离外停车。
列车1正常运行至车站B,进行疏散清客,再安排2名综合乘务员(司机)上车,进行空载牵引救援。
列车3在区间等待救援后恢复运行。
方案四:
列车3进行制动并在安全距离外停车。
列车1正常运行至车站B,进行疏散清客,再安排2名综合乘务员(司机)上车,对故障车进行空载牵引救援。
同时中心行调通过广播与列车3的乘客进行通话,引导乘客打开车门,自行进行区间疏散至车站A。若此工况下无区间疏散平台,则沿用方案三车内等待。
针对方案三和四,若已选定运用牵引救援策略,应该最大限度地减少对正线其他列车运营的影响[6],对于不参与救援行动的列车(即列车3),一般不考虑让其载客返回车站A。因为一方面对于列车3的乘客而言,等待时间也较长,另一方面是在此高密度行车间隔下,车站A很有可能已经有列车进站或即将进站,反向运行反而会对其后续列车带来“传导式”影响。
以上4种方案,具体要考虑故障列车的迫停位置、区间长度、列车追踪间隔以及各列车上的载客人数等因素,来最终确定救援方案。
(2)列车1已驶离车站B:当列车1已驶离车站B,无法进行前车牵引救援,因此只能在上述方案的一、二中进行选择。
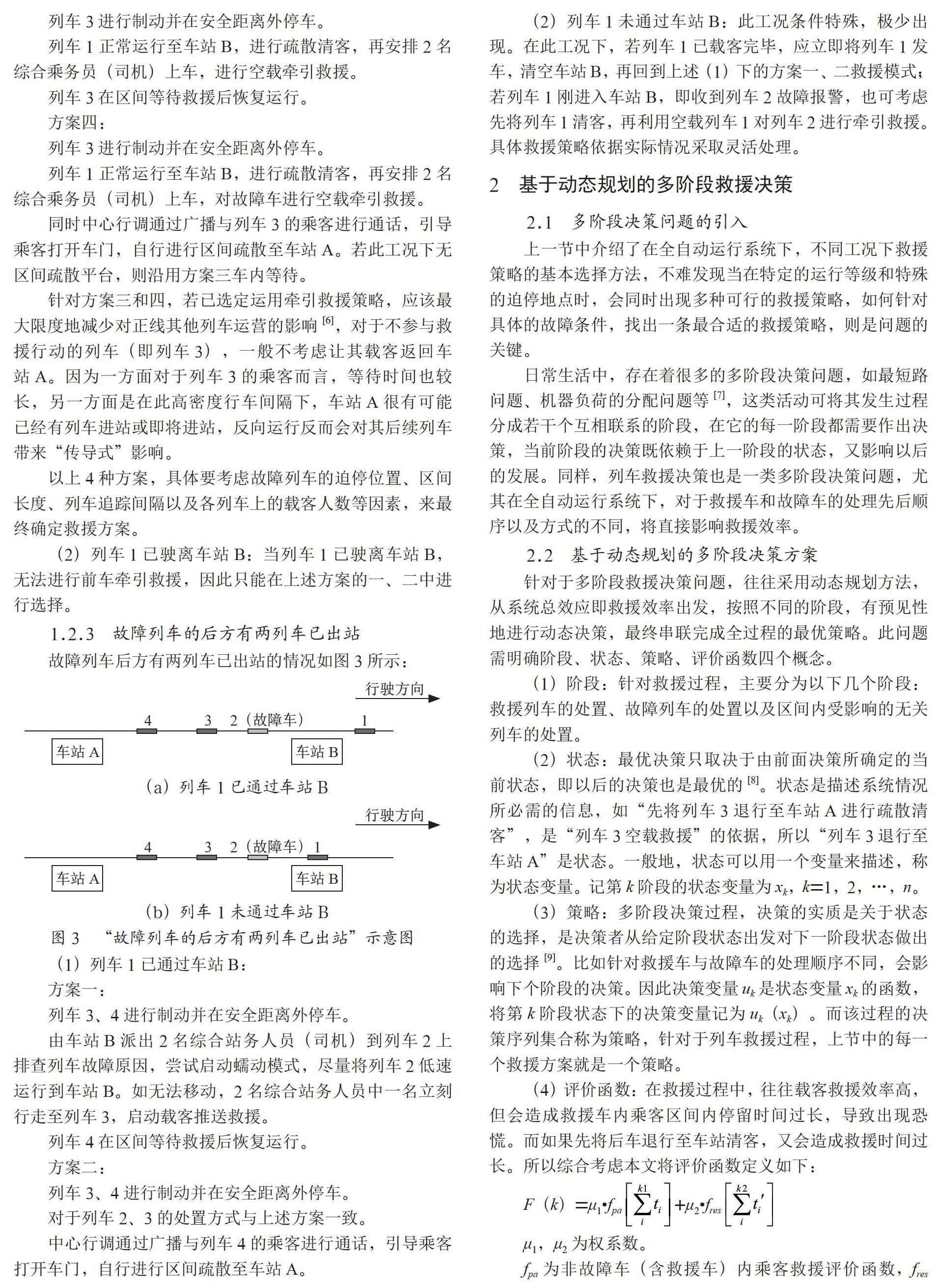
1.2.3 故障列车的后方有两列车已出站
故障列车后方有两列车已出站的情况如图3所示:
(1)列车1已通过车站B:
方案一:
列车3、4进行制动并在安全距离外停车。
由车站B派出2名综合站务人员(司机)到列车2上排查列车故障原因,尝试启动蠕动模式,尽量将列车2低速运行到车站B。如无法移动,2名综合站务人员中一名立刻行走至列车3,启动载客推送救援。
列车4在区间等待救援后恢复运行。
方案二:
列车3、4进行制动并在安全距离外停车。
对于列车2、3的处置方式与上述方案一致。
中心行调通过广播与列车4的乘客进行通话,引导乘客打开车门,自行进行区间疏散至车站A。
(2)列车1未通过车站B:此工况条件特殊,极少出现。在此工况下,若列车1已载客完毕,应立即将列车1发车,清空车站B,再回到上述(1)下的方案一、二救援模式;若列车1刚进入车站B,即收到列车2故障报警,也可考虑先将列车1清客,再利用空载列车1对列车2进行牵引救援。具体救援策略依据实际情况采取灵活处理。
2 基于动态规划的多阶段救援决策
2.1 多阶段决策问题的引入
上一节中介绍了在全自动运行系统下,不同工况下救援策略的基本选择方法,不难发现当在特定的运行等级和特殊的迫停地点时,会同时出现多种可行的救援策略,如何针对具体的故障条件,找出一条最合适的救援策略,则是问题的关键。
日常生活中,存在着很多的多阶段决策问题,如最短路问题、机器负荷的分配问题等[7],这类活动可将其发生过程分成若干个互相联系的阶段,在它的每一阶段都需要作出决策,当前阶段的决策既依赖于上一阶段的状态,又影响以后的发展。同样,列车救援决策也是一类多阶段决策问题,尤其在全自动运行系统下,对于救援车和故障车的处理先后顺序以及方式的不同,将直接影响救援效率。
2.2 基于动态规划的多阶段决策方案
针对于多阶段救援决策问题,往往采用动态规划方法,从系统总效应即救援效率出发,按照不同的阶段,有预见性地进行动态决策,最终串联完成全过程的最优策略。此问题需明确阶段、状态、策略、评价函数四个概念。
(1)阶段:针对救援过程,主要分为以下几个阶段:救援列车的处置、故障列车的处置以及区间内受影响的无关列车的处置。
(2)状态:最优决策只取决于由前面决策所确定的当前状态,即以后的决策也是最优的[8]。状态是描述系统情况所必需的信息,如“先将列车3退行至车站A进行疏散清客”,是“列车3空载救援”的依据,所以“列车3退行至车站A”是状态。一般地,状态可以用一个变量来描述,称为状态变量。记第k阶段的状态变量为xk,k=1,2,…,n。
(3)策略:多阶段决策过程,决策的实质是关于状态的选择,是决策者從给定阶段状态出发对下一阶段状态做出的选择[9]。比如针对救援车与故障车的处理顺序不同,会影响下个阶段的决策。因此决策变量uk是状态变量xk的函数,将第k阶段状态下的决策变量记为uk(xk)。而该过程的决策序列集合称为策略,针对于列车救援过程,上节中的每一个救援方案就是一个策略。
(4)评价函数:在救援过程中,往往载客救援效率高,但会造成救援车内乘客区间内停留时间过长,导致出现恐慌。而如果先将后车退行至车站清客,又会造成救援时间过长。所以综合考虑本文将评价函数定义如下:
F(k)=μ1·fpa+μ2·fres
μ1,μ2为权系数。
fpa为非故障车(含救援车)内乘客救援评价函数,fres为故障车内乘客救援评价函数,此评价函数根据运营需求而定。
ti为非故障车内乘客受影响的时间,ti′为故障车内受影响乘客的时间(即全程救援时间)。
k1为非故障车内乘客受影响的救援阶段,k2为故障车内乘客受影响的救援阶段。
2.3 案例分析
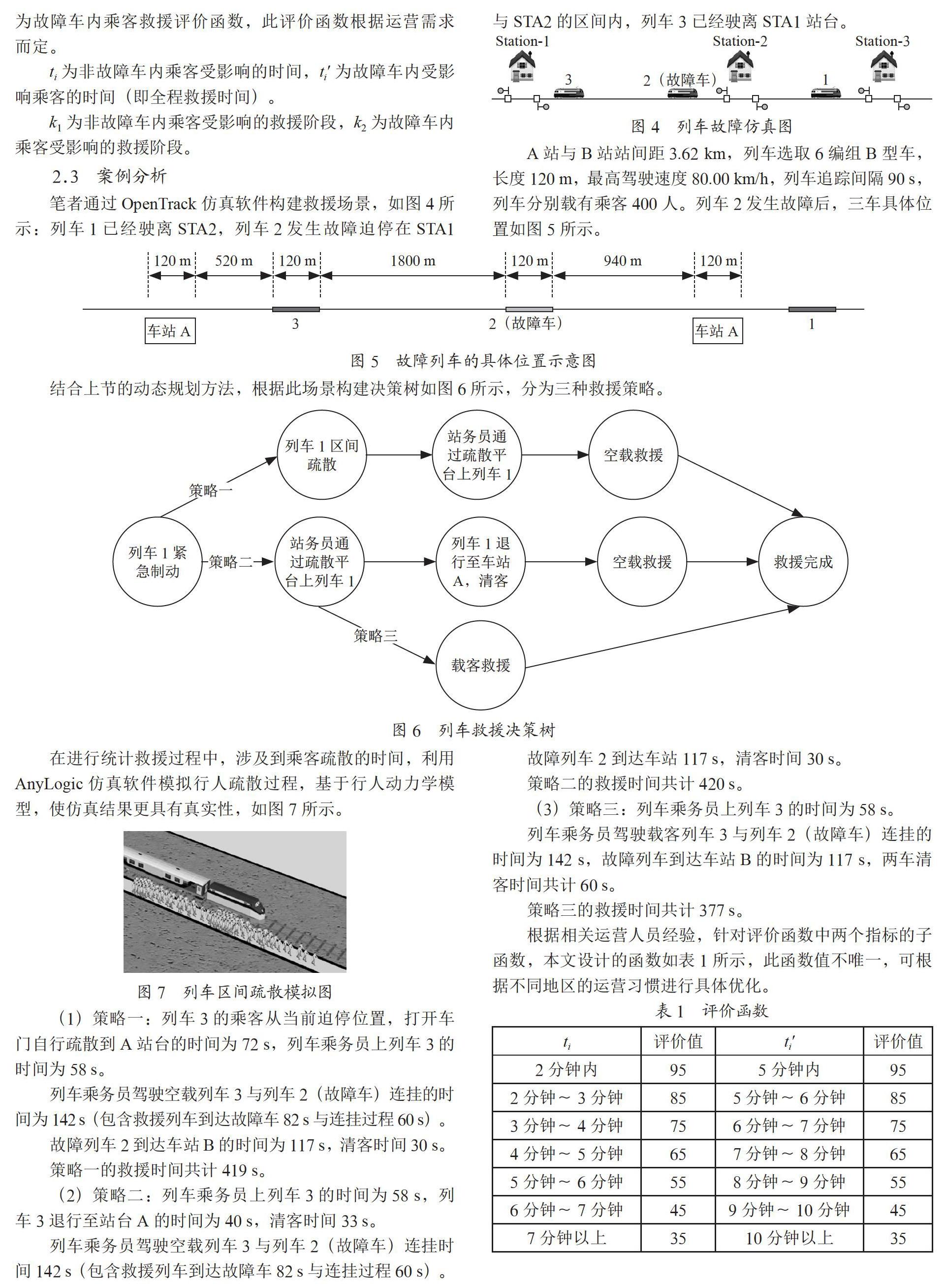
笔者通过OpenTrack仿真软件构建救援场景,如图4所示:列车1已经驶离STA2,列车2发生故障迫停在STA1与STA2的区间内,列车3已经驶离STA1站台。
A站与B站站间距3.62 km,列车选取6编组B型车,长度120 m,最高驾驶速度80.00 km/h,列车追踪间隔90 s,列车分别载有乘客400人。列车2发生故障后,三车具体位置如图5所示。
结合上节的动态规划方法,根据此场景构建决策树如图6所示,分为三种救援策略。
在进行统计救援过程中,涉及到乘客疏散的时间,利用AnyLogic仿真软件模拟行人疏散过程,基于行人动力学模型,使仿真结果更具有真实性,如图7所示。
(1)策略一:列车3的乘客从当前迫停位置,打开车门自行疏散到A站台的时间为72 s,列车乘务员上列车3的时间为58 s。
列车乘务员驾驶空载列车3与列车2(故障车)连挂的時间为142 s(包含救援列车到达故障车82 s与连挂过程60 s)。
故障列车2到达车站B的时间为117 s,清客时间30 s。
策略一的救援时间共计419 s。
(2)策略二:列车乘务员上列车3的时间为58 s,列车3退行至站台A的时间为40 s,清客时间33 s。
列车乘务员驾驶空载列车3与列车2(故障车)连挂时间142 s(包含救援列车到达故障车82 s与连挂过程60 s)。
故障列车2到达车站117 s,清客时间30 s。
策略二的救援时间共计420 s。
(3)策略三:列车乘务员上列车3的时间为58 s。
列车乘务员驾驶载客列车3与列车2(故障车)连挂的时间为142 s,故障列车到达车站B的时间为117 s,两车清客时间共计60 s。
策略三的救援时间共计377 s。
根据相关运营人员经验,针对评价函数中两个指标的子函数,本文设计的函数如表1所示,此函数值不唯一,可根据不同地区的运营习惯进行具体优化。
根据上一节构造的评价函数,权系数分别取0.5,策略评价结果如表2所示。
根据评价结果显示,对于策略三,虽然载客救援的效率非常高,但同时会增加非故障车乘客的等待时间压力,在高峰期时更容易造成恐慌,因此分值最低,不推荐采用。策略一的评分最高,因列车3刚驶离站台不远,在列车无法自行退行并且疏散平台范围允许的情况下,中心行调可通过列车广播引导乘客进行区间疏散,同时对于故障列车来说,相比于策略二的救援车退行站台后再进行救援,对于列车3的乘客影响相对小一些。策略二的评价值虽然稍低于策略一,但我们运营的首要原则是保证乘客的安全,乘客通过疏散平台自行疏散时会增加风险性,而且策略二的救援效率与策略一偏差非常小。所以在此工况下,本文认为策略二最适合。
3 结 论
本文针对全自动运行系统下,列车区间迫停救援这一问题,首先分析了全自动运行系统下列车救援的基本流程,进一步深化分析GoA4运行等级下,三种不同工况不同条件下救援策略的选择。笔者在分析过程中,针对一些无法直观进行策略选择的场景,结合动态规划理论,将多阶段决策问题引入,提出了一种新的救援决策方法,并引入详细仿真案例进行实际分析。本文所阐述的方法,对全自动运行系统下的运营者具有一定的借鉴作用。
参考文献:
[1] 郜春海,王伟,李凯,等.全自动运行系统发展趋势及建议 [J].都市快轨交通,2018,31(1):51-57.
[2] 张艳兵,戴克平.自主化全自动运行系统研究与应用 [J].都市快轨交通,2017,30(6):1-6.
[3] 王志强,何嘉杭.故障列车救援情况下的多列车运行仿真研究 [J].城市轨道交通研究,2013,16(1):19-23+53.
[4] 李宇辉.城轨列车故障救援组织与优化 [J].铁道运输与经济,2011,33(9):31-35.
[5] 梁强升.提高地铁列车故障救援效率的探讨 [J].城市轨道交通研究,2007(8):23-25.
[6] 马波.城市轨道交通列车故障救援组织优化研究 [J].交通运输工程与信息学报,2016,14(4):76-80.
[7] 马云东,朱柏石.多目标多阶段决策问题的最优化方法 [J].系统工程理论与实践,1990(1):13-17+35.
[8] 王娟.动态规划——多阶段决策问题的求解方法 [J].当代经理人,2006(21):748-749.
[9] 袁佳乐,黄兆华,曹玉红.动态规划在资源分配上的应用 [J].西安文理学院学报(自然科学版),2008(3):66-69.
作者简介:朱桐立(1993.06-),男,汉族,北京人,助理工程师,硕士研究生,研究方向:城市轨道交通信号系统。