基于视觉的煤矿输电线巡检无人机自主降落系统
2020-07-31张传江刘险峰陈帮干曹金芳孟祥宇
张传江 刘险峰 陈帮干 曹金芳 孟祥宇


摘 要:面对煤矿中复杂的地形,巡检无人机很难将降落地标与环境区分开,无法实现定点的精准降落。基于以上问题,提出了一种基于视觉导航的煤矿输电线无人机自主降落系统。为了区分地标和环境区,将地标设计为一种拓扑模式,为了提高图像二值化的检测效率,提出了一种动态阈值方法。根据有效图像信息计算水平面内的相对距离,用线性插值法求出相对高度。在相应平台上进行降落实验,实验结果表明,提出的自主降落系统性能稳定,可以准确自主降落。
關键词:计算机视觉;图像二值化;无人机;自主降落
中图分类号:V279;V249;TP391.41 文献标识码:A 文章编号:2096-4706(2020)04-0014-03
Abstract:Facing the complex terrain in the coal mine,it is difficult for UAV to distinguish the landing landmark from the environment and realize the precise landing at a fixed point. Based on the above problems,an autonomous landing system of UAV for coal mine transmission line based on visual navigation is proposed. In order to distinguish the landmark from the environment area,the landmark is designed as a topological mode. In order to improve the detection efficiency of two value image,a dynamic threshold method is proposed. According to the effective image information,the relative distance in the horizontal plane is calculated,and the relative height is calculated by linear interpolation. The landing experiment is carried out on the corresponding platform. The experimental results show that the proposed autonomous landing system has stable performance and can land accurately.
Keywords:computer vision;image binarization;UAV;autonomous landing
0 引 言
煤矿输电线路自身老化和人为破坏及复杂未知环境对其的影响,都对电网的安全稳定运行及煤矿的正常开采提出了严峻的挑战[1]。利用无人机对煤矿输电线路进行巡检是目前比较常用的手段,在整个煤矿输电线巡检无人机自主飞行的过程中,如何保证无人机在煤矿中的复杂恶劣环境下进行对目标的检测、跟踪和自主降落是提高无人机应用价值的重要目标[2]。实现这些目标的大多数传统方法依赖于全球定位系统(GPS)和惯性导航的组合[3]。与传统方法相比,基于视觉的导航系统具有很强的抗干扰能力,视觉传感器可以实时捕捉外部环境中的运动信息[4]。因此,利用基于视觉的导航方法实现无人机在复杂环境中定点安全快速降落成为当前研究的热点。
本文提出了一种基于视觉的煤矿输电线巡检无人机自主降落系统。设计了一个由两个大小不同的等边三角形组成的拓扑模式,无人机可以很容易地从复杂的周围环境中识别出来。然后提出了一种动态阈值图像二值化方法,如果识别成功,将稍微调整阈值,如果在连续帧中没有检测到目标,将重新搜索可能的阈值,从而提高检测效率。为了估计无人机相对于降落平台的相对位置和方向,利用图像的有效信息来计算相对水平距离和航向角偏差,采用线性插值法逼近相对高度[5,6]。最后在相应平台上进行实验,以评估本文提出的无人机自主降落系统的性能。
1 无人机自主降落系统
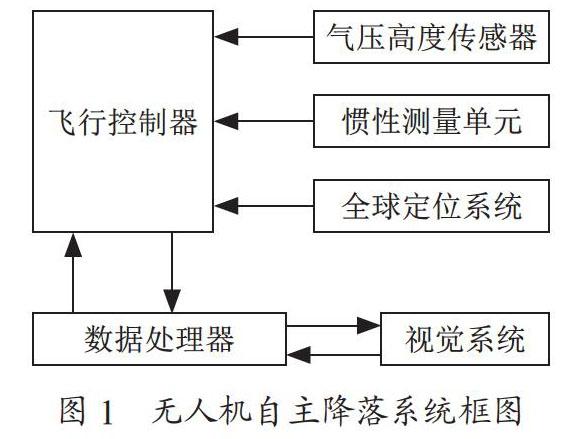
整个无人机自主降落系统可分为飞行控制器、气压高度传感器、惯性测量单元、全球定位系统、数据处理器和视觉系统几个部分,如图1所示。
本文主要针对视觉系统进行研究,其包括图像采集和图像处理两个部分。本文使用带有Linux操作系统中的树莓派4B作为图像处理单元,图像由广角175度高清摄像机获取。
地标的可用性在很大程度上会影响识别的精度,因此专门设计了两种拓扑结构图作为无人机降落地标,如图2所示,其由两个大小不同的等边三角形组成,最外面的三角形边长42 cm,里面三角形边长为24 cm,两个三角形厚度都为6 cm,图案是黑白两色。
由于三角形具有方向性,所以该图案可以指示无人机的方向,如图2所示,右边图案还可以通过箭头进行识别方向,箭头从三角形的中心开始,指向外围三角形的顶点。该设计可以为无人机提供与地标相关的偏航信息。当图像的分辨率不变,且图像中地标的大小或形状随无人机高度的变化而变化时,仍能识别出目标。在实际应用中,可以根据需要修改两个等边三角形的边长和位置的关系。
2 基于视觉的降落点识别与定位
该系统利用OpenCV库,利用机载广角摄像机采集的图像信息实现地标检测[7]。
2.1 图像预处理
摄像机保持垂直向下拍摄,分辨率为640×480。在目标检测之前对采集到的图像进行预处理,以减少冗余信息。为了达到这个目的,地标被放置在降落平台上,相机获取地标的视频流。对于每一帧,首先将图像大小转换为固定值。然后使用高斯函数对图像进行平滑和滤波处理。最后,在去除高斯噪声后,将整个图像进行黑白二值化[8,9]。
2.2 动态阈值
本文针对图像二值化过程,设计了一种由两部分组成的动态阈值方法:在每次识别成功后对阈值进行微調,并在连续帧中未检测到目标时重新搜索可能的阈值。全局阈值的初始值在执行对象检测之前设置,为目标区域创建感兴趣区域(ROI),在该区域中,地标在前一帧中被成功检测。如果当前帧的局部阈值和全局阈值之间的差值在一定范围内,则使用局部阈值对下一帧进行二值化。如果目标在多个帧中连续丢失,则在该范围内以固定步长搜索阈值,如果经过多次迭代搜索仍没有找到目标,则扩展阈值的搜索范围并减小搜索步长,如果在遍历多次迭代后仍未找到正确的阈值,则认为目标已完全丢失。
2.3 目标检测
利用OpenCV库函数对二值化图像的所有轮廓进行分层树结构检索,根据轮廓数量、轮廓位置、轮廓面积和边界拐点个数等指标选择正确的轮廓。本文设计的地标不包含并排的子轮廓,因此可以采用层次识别算法对目标进行检测。
目标标记由5个纯形状依次嵌套而成,因此检测到的目标轮廓总数必须小于5个。如果存在并列或重合等位置关系,则排除轮廓集,并判断下一组,在某些情况下,并非所有轮廓都可以被找到。正确的等高线集应满足等高线数目和拐点数目的约束。本文根据拐点的数目对五个轮廓进行编码,分别是4、4、3、3、4。对应于拐点数量的已识别轮廓的数量如表1所示。
采用Douglas-Peucker算法对闭合轮廓曲线进行压缩,将其分割成若干段,得到拐点。表1中等高线拐点序列编号的内容,如“4433*”,是根据每个等高线的拐点编号排列的。“*”表示在检测期间忽略最里面的轮廓,因为在某些情况下该轮廓太小,无法准确识别。如果结果与表1中的任何一个条件都不匹配,则判断图像区域中没有地标。对于表1所列的情况,优先确定大多数轮廓。当无人机非常接近地标时,开始搜索最里面的轮廓。目标检测的整个过程如图3所示。
2.4 相对位置和方位计算
图像处理中地标检测后,提取图像的有效特征点,计算相对位置和方位,实现无人机的自主降落。在这项研究中,采用线性插值的方法来近似求出相对高度和最大侧边长度之间的关系。在实验之前,收集两组数据作为已知量。一组要求地标中心与摄像机中心对齐,而另一组要求地标中心和摄像机中心之间一定的偏移。多次执行测量,并且记录每次无人机的实际高度,以及两个三角形边长的最大像素侧边长度。完成位置和方位计算后,将数据送入无人机控制系统,完成跟踪和降落任务。
3 实验结果
在固定的平台上测试无人机自主降落算法的性能,降落阶段采用视觉导航,负责引导无人机在距降落平台高度3 m、直径约6 m的锥形空间降落。降落采用175度广角摄像机,以30帧/秒的速度拍摄640×480分辨率图像。图像处理和目标检测都是在树莓派3B上进行的。图4表示使用本文提出的动态阈值方法获得的原始图像和二值图像。
实验中,摄像机镜头保持垂直向下,无人机保持在平台上方飞行。无人机从手机接收指令,执行视觉搜索和悬停任务,然后执行降落指令。无人机降落过程中的垂直速度曲线如图5所示。
4 结 论
本文设计了一种视觉导航方法来辅助无人机跟踪目标,实现自主降落。利用设计良好的拓扑模式作为视觉指标,提出了一种在图像处理中搜索阈值的方法,提高了目标识别的效率。线性插值方法的应用保障了相对高度的精确性。在相应平台上成功地进行了实验,显示了稳定的跟踪和降落过程,此系统达到了煤矿输电线路巡检无人机自主降落的要求。
参考文献:
[1] 杨婷.电力巡检四旋翼无人机自主着陆系统研究 [D].成都:电子科技大学,2019.
[2] FAN R,JIAO J,PAN J,et al. Real-Time Dense Stereo Embedded in A UAV for Road Inspection [C]//IEEE Conference on Computer Vision and Pattern Recognition Workshops,2019.
[3] 索文凯,胡文刚,张炎,等.无人机自主降落过程视觉定位方法研究 [J].激光技术,2019,43(5):101-106.
[4] FAN R.Real-time computer stereo vision for automotive applications [D].Bristol:University of Bristol,2018.
[5] 徐焕太.基于双目视觉的多旋翼无人机自主降落定位方法研究 [D].哈尔滨:哈尔滨理工大学,2018.
[6] FAN R,AI X,DAHNOUN N.Road Surface 3D Reconstruction Based on Dense Subpixel Disparity Map Estimation [J].IEEE Transactions on Image Processing,2018,27(6):3025-3035.
[7] 屈小媚,刘韬,谈文蓉.基于多无人机协作的多目标无源定位算法 [J].中国科学:信息科学,2019,49(5):570-584.
[8] 贾配洋,彭晓东,周武根.四旋翼无人机自主移动降落方法研究 [J].计算机科学,2017,44(S2):520-523.
[9] 董素河.输电线路智能无人机巡检的研究及应用 [J].石化技术,2019,26(8):350-351.
作者简介:张传江(1969-),男,汉族,安徽淮北人,淮北矿业机电装备处处长,高级工程师,本科,研究方向:矿山机电。