管道系统动力吸振器布置多目标优化设计
2020-07-16王碧浩熊夫睿黄茜张文正
王碧浩,熊夫睿,黄茜,张文正
管道系统动力吸振器布置多目标优化设计
王碧浩,熊夫睿,黄茜,张文正
(中国核动力研究设计院 核反应堆系统设计技术重点实验室,四川 成都 610213)
工业设备中管道系统的振动具有明显地线谱特征,动力吸振器可以有效抑制管道在特定频率下的振动。引入一类含平动和转动自由度的动力吸振器,针对某管道系统开展简谐激励下的振动控制研究。首先,分别采用梁单元、弹簧-质量单元模拟管道和动力吸振器,并将动力吸振器与管道的运动方程耦合。采用拉丁超立方体抽样方法对动力吸振器的参数进行采样,建立动力吸振器参数到管道支承位置振动响应的输入输出关系。采用Kriging插值法建立输入输出关系的代理模型,基于代理模型进行参数相关性分析。应用全局高效响应面算法,对管道上动力吸振器的布置进行多目标优化,实现管道系统的振动控制,优化变量包括吸动力吸振器的安装位置和刚度参数。并针对得到的最优设计方案进行稳健性评估,考查各设计参数在设计方案名义值附近扰动时,对各输出变量的影响。
多目标优化;动力吸振器;代理模型;减振降噪;相关性分析
管道系统广泛应用于各类机械设备中,也是振动传递的主要途径之一。在内部流体激励和外部机械设备激励的共同作用下,管道极易发生剧烈振动导致性能和可靠性降低,因此对管道系统进行减振优化非常必要[1]。
动力吸振器是一类廉价且易于维护的振动控制元器件,可以有效降低管道在特定频率下的振动,在低频振动控制中有着广泛的应用。动力吸振器通常作为辅助的弹簧质量单元附加在管道系统上,通过调谐质量和刚度参数使之在激励作用下发生共振,从而将外部激励的能量转化为其机械能,进而起到抑制管道系统振动的目的[2]。
然而当复杂管道系统受到多个激励源作用时,需要采用多个单自由度(分别含平动刚度或转动刚度)的动力吸振器对其进行减隔振控制。通常需要同时对多个动力吸振器参数及其部署位置进行仔细调谐。本文引入一类含平动和转动自由度的动力吸振器,针对某管道系统开展简谐激励下的振动控制多目标优化研究。
1 控制方程
管道在外部激励作用下,横向振动是其主要的变形,根据欧拉-伯努利梁理论,均质梁结构的振动方程为:
式中:为弹性模量,Pa;为梁的截面惯性矩,m4;为沿梁轴向的质量分布,kg/m;为梁的振动位移,m;(,)为梁所受外载荷,N;为梁的位置坐标,m;为时间,s。
动力吸振器对梁振动的抑制效果通过在主系统上施加的集中力体现,考虑动力吸振器惯性效应作用的梁受迫振动方程为:
动力吸振器的运动方程为:


耦合了动力吸振器梁的稳态解为:

式中:W为模态坐标向量;φ为模态函数;Z为梁在吸振器安装位置的平动位移,m;Θ为梁在吸振器安装位置的转角,rad。
则动力吸振器作用在梁上的力和弯矩分别为:


通过模态展开,利用模态函数的正交性和归一化,可以得出耦合系统的模态坐标,将其代入式(6)~式(8),即可得到系统在稳态下的位移响应[3]。
2 振动分析模型
2.1 结构分析模型
某管道系统根据需要和用途沿管内流体流动方向设置了电动闸阀、电磁阀等阀门。管道系统通过17个支吊架约束,支吊架一端连接在管道上,另一端固定在基座上。为实现管道在系统出入口位置的激励下各支吊架位置的振动水平下降,本文拟沿管道设置若干动力吸振器,通过优化动力吸振器的参数实现低频段内的振动被动控制。
为使模型尽量简化,且又能准确模拟管道系统的振动特性,根据实际结构特征和边界条件并结合有限元理论,建立管道系统的有限元分析模型。
采用管单元模拟管道,阀门及一些对系统整体刚度影响很小的部件在模型中只考虑其质量影响。支吊架采用弹簧单元模拟,不同支吊架在管道一侧的固定方式根据其功能不同约束相应的自由度,支吊架在基座一侧约束所有方向的自由度。沿管道布置的动力吸振器采用弹簧-质量单元模拟,并将动力吸振器与管道单元的运动方程耦合。
考虑管道系受到来自进出口位置的单位带宽激励,激励的方式为施加集中力,进口和出口位置的激励同相位,激励频段范围为10~300 Hz,振动分析通过谐响应分析实现。
2.2 优化变量
为考察管道系统的动力学特性,对其进行了模态分析。根据管道系统自身的固有属性将其分为8个区域,每个区域布置一个动力吸振器,通过优化各动力吸振器的布置位置和参数,对支吊架与管道连接位置在一定频段内的振动水平进行优化。
每个动力吸振器均包含水平自由度和转动自由度,优化变量包括:动力吸振器的布置位置、平动刚度、转动刚度、质量和转动惯量。动力吸振器参数的上下界见表1,其中动力吸振器的安装位置采用归一化坐标,0表示每个区域的起点,1表示每个区域的终点。有限元模型见图1所示。
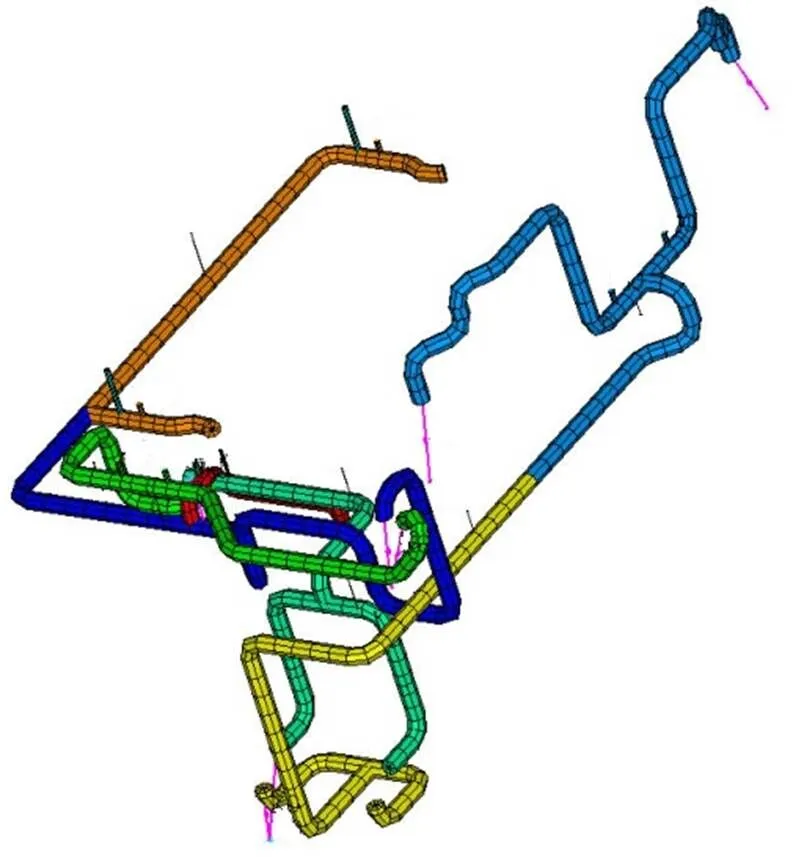
图1 管道系统有限元模型
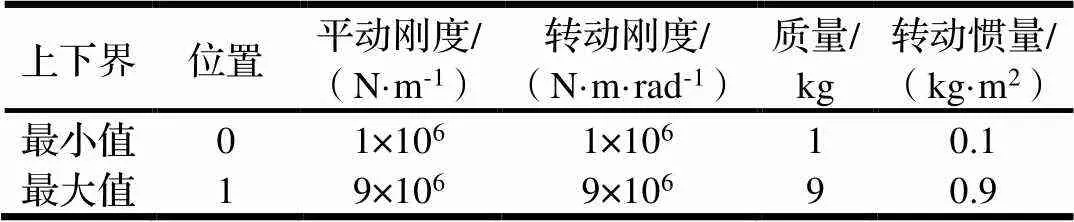
表1 动力吸振器参数取值范围
3 试验设计
3.1 参数采样
管道系统布置8动力吸振器,共有40个优化参数,17支吊架约束位置的振动响应为优化目标。不同输入参数对优化目标影响程度不同,且输入参数之间也彼此制约,在优化分析时需要重点关注主要设计参数。为定性考察输入参数与优化目标的变化趋势指导后续优化策略,在进行优化分析前,对动力吸振器的输入参数进行采样。
为避免出现数据截尾,确保样本点尽可能覆盖整个分布区间,提高抽样效率。基于拉丁超立方体抽样方法,依据各输入参数的分布函数和定义域范围,采用等概率分层取样的方法产生各参数的随机样本[4]。对动力吸振器的输入参数进行采样,样本点个数400,随机种子数69。通过对管道系统有限元模型进行谐响应计算,得出样本点的真实响应值,并将得到的样本及其响应值保存在样本点数据库中。
通过建立动力吸振器输入参数到管道支承位置振动响应的输入输出关系,可以考察不同输出位置的振动响应分布。图2给出了管道与7#支吊架、2#支吊架连接位置输出振动响应的统计分布,其中振动加速度级基于响应最大值进行了归一化处理。可以看出,相对于2#支吊架与管道连接位置,7#支吊架与管道连接位置振动响应分布相对紧凑。
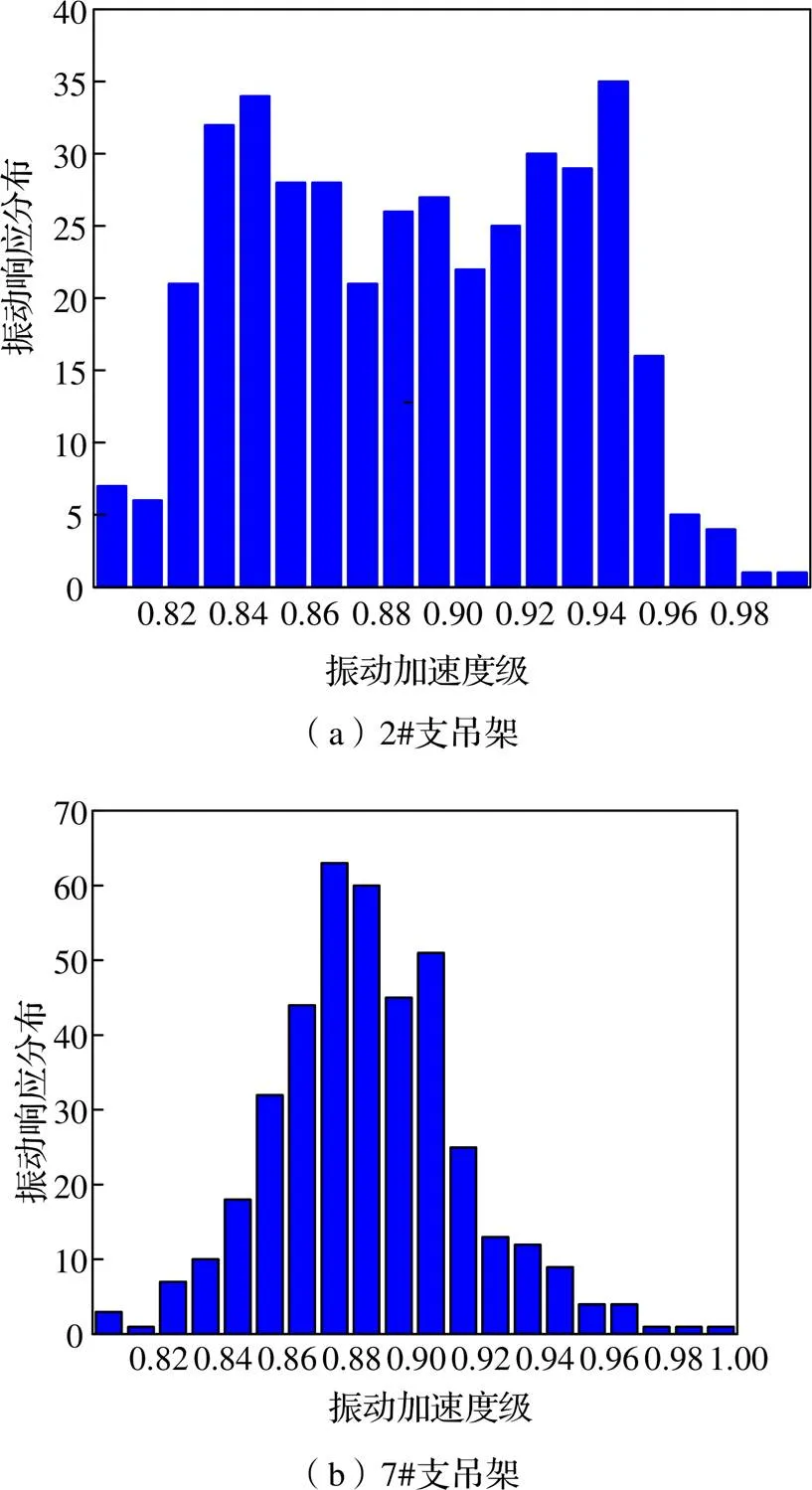
图2 支吊架位置振动响应统计分布
3.2 代理模型
Kriging模型以变异函数理论为基础,对有限区域内的变量进行无偏最优估计,其数学模型如下[5-7]:

式中:()为待拟合的函数;()为已知的多项式函数;()为一个均值为0、方差为2的随机函数,表示局部偏差,其协方差矩阵为:

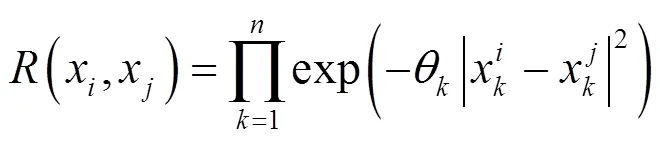
(x,x)为任意两个样本点x、x的相关函数,表示其局部偏离程度,形式为:
对于任一预测点,其预测值为:

T()表示观测点于样本点之间的相关性,形式为:

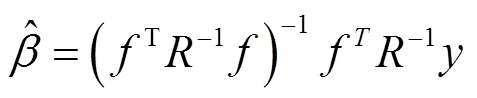
的估计为:
参数θ为极大似然估计,通过求解以下最优化问题得到:
通过求解式(18)求出θ,代入式(15)得到T(),再结合式(14)可以得到最优拟合的Kriging模型。
基于拉丁超立方体采样计算得到的样本数据对,采用Kriging插值法建立输入输出关系的代理模型。各支吊架位置振动响应代理模型的精度见表2,其定义如下:
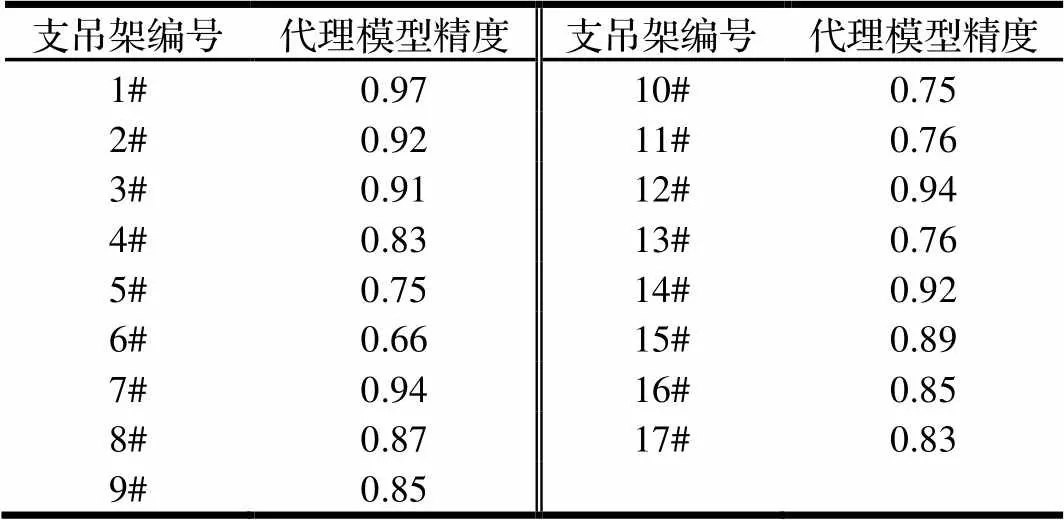
表2 支吊架位置振动响应代理模型精度
由表2中可以看到,代理模型的最高精度可以达到0.97,绝大多数的模型精度在0.7以上,最低为0.66。图3给出了5#动力吸振器的安装位置、平动刚度与10#支吊架位置振动响应关系的代理模型。
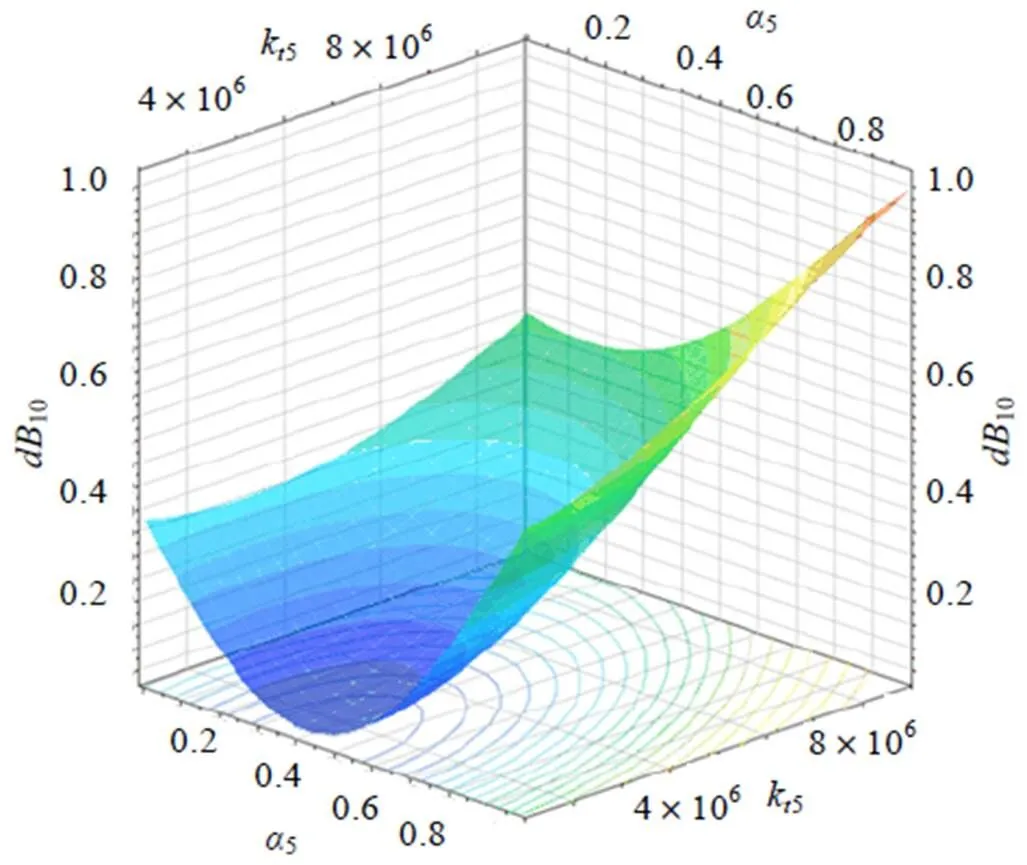
图3 Kriging拟合的10#支吊架响应代理模型
3.3 相关性分析
通过参数采样建立的输入参数与优化目标之间的统计分布,只能定性考察二者之间变化趋势。对此,对每一组输入输出关系进行相关性分析来研究二者的关联,考察不同参数间的敏度大小。在优化分析时根据输入参数与优化目标的相关性,可以对输入参数进行适当缩并。
相关性系数的定义为[8]:
式中:S、S分别为、的标准差。
通过考察输入变量对系统输出响应的相关性,可以得到对优化目标影响最显著的输入参数。表3给出了1#动力吸振器参数与17个支吊架位置响应之间的相关性系数。
根据表3中的相关性系数可看到,1#动力吸振器对1#、2#、3#支吊架位置的输出响应影响最明显,且主要体现在1#动力吸振器的安装位置、质量、平动刚度三个参数。在第1段管道上布置含平动刚度的动力吸振器,通过调谐其安装位置、平动刚度、和质量,可有效控制1#支吊位置的振动响应,并对2#、3#支吊架位置的振动抑制起到一定作用。1#动力吸振器对其他支吊架位置的输出响应相关性较弱。
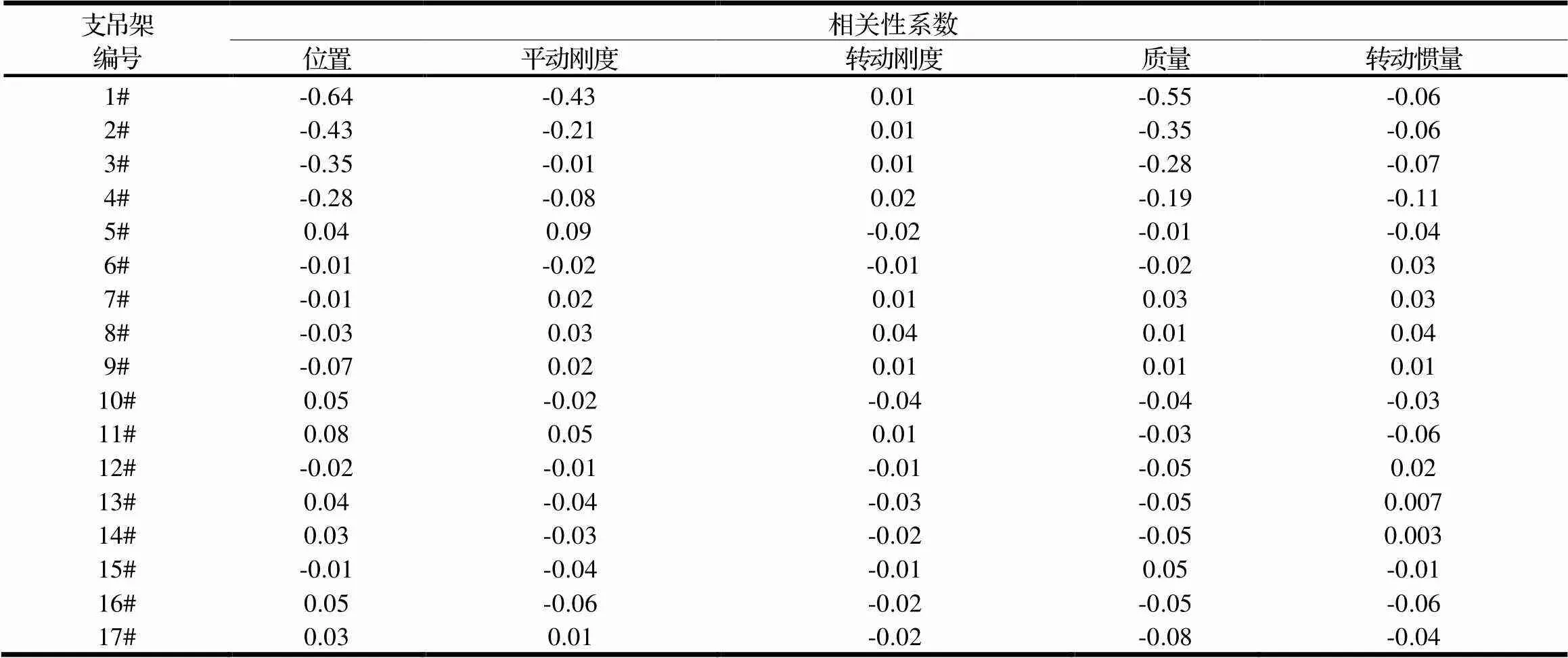
表3 1#动力吸振器参数对振动响应的相关性系数
通过对所有8个动力吸振器的输入参数分别与17个优化目标之间的相关性进行分析,可知动力吸振器对相近支吊架位置的输出有较大影响,且间隔2个支吊架之后其影响可以忽略。输入参数与输出响应的相关系数都较小,表现出较弱的线性关系。对于任何一个输入变量而言,至少对一个优化目标有着比较大的影响(线性或非线性),因此,后续优化过程中考虑所有的设计变量,以此尽可能提高优化效果。
4 优化设计
利用数学模型来表征系统输入输出之间的关系,通过所构建代理模型代替实际的系统仿真分析进行优化设计,可有效提高优化效率[9-11]。
采用全局高效响应面算法(EGO)对管道上动力吸振器的布置参数进行多目标优化[12-13]。以17个支吊架位置振动响应为优化目标,8个动力吸振器参数为约束条件,可以得到优化问题定义为:
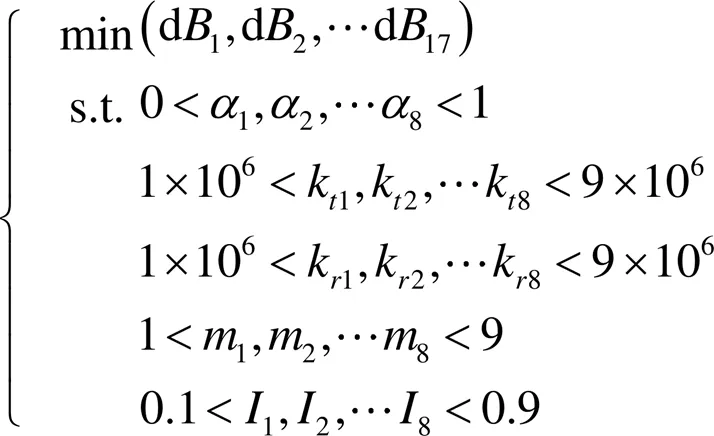
式中:dB为第个支吊架位置的振动响应加速度级;k为第个动力吸振器的平动刚度,N/m;k为第个动力吸振器的转动刚度,N·m/rad;m为第个动力吸振器的质量,kg;I为第个动力吸振器的转动惯量,kg·m2。
首先基于代理模型进行寻优,由于不需要重复调用有限元模型计算,进而可以大幅减小求解时间。虽然上述代理模型整体精度较高,但仅基于代理模型进行优化设计得到的最优设计方案,往往与实际情况有较大的偏差。因此,还需将通过代理模型得到的最优解作为输入参数带入有限元模型进行验证。如果代理模型和有限元模型计算得到的输出响应相差较大,则利用有限元模型的数据对代理模型进行更新。往复以上迭代过程,直至得到最优设计方案,EGO算法流程图如图4所示。
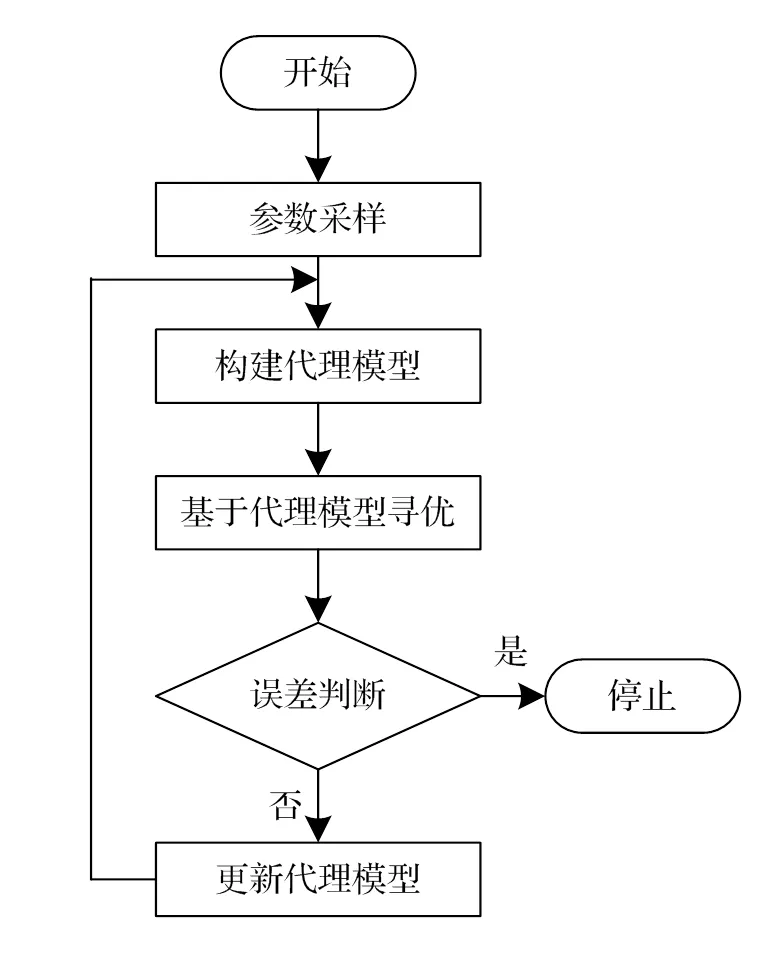
图4 EGO算法流程图
利用EGO全局高效响应面算法,经过581次迭代计算(有限元模型计算181次,其中前400次直接读取代理模型结果)得到最优设计方案。输入参数见表4,优化前后输出结果对比见图5。可以看出17个支吊架位置的振动响应都有不同程度的减小。
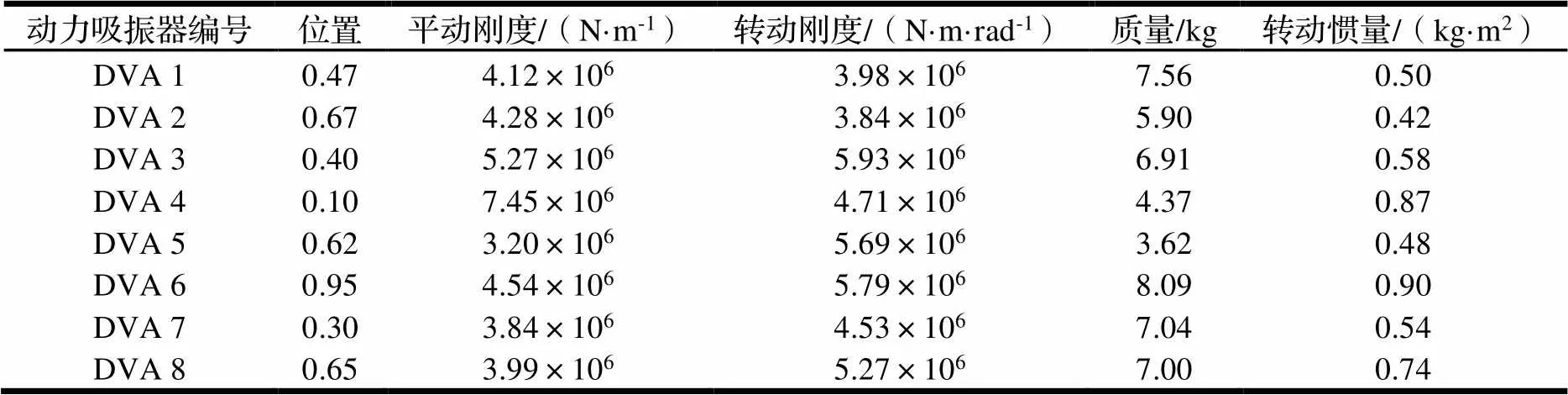
表4 优化后的输入参数
5 稳健性评估
数值仿真得到的最优解是名义值,由于工程应用中存在制造和安装的误差,致使动力吸振器实际的参数与名义值存在一定的偏差。为了避免在确定性仿真中有效的设计可能在实际应用中导致有缺陷的产品,必须考虑设计变量的可靠性[14-15]。
因此,针对得到的最优设计方案进行稳健性评估,考查各输入参数在设计方案名义值附近±10%扰动时,输出对输入变异性的敏感性。假设各输入参数服从正态分布,采用Monte Carlo抽样方法进行采样。
样本点个数设定为10000,对多目标最优解的鲁棒性进行检验,评估过程基于代理模型完成。Monte Carlo方法随机选择给定分布的参数组合进行多次仿真。
绝大多数输出变量的标准差在0.1~0.6范围内,仅有14#、15#支吊架位置超出该范围,分别为1.87、0.75。即便如此,两个位置的变异系数也仅分别为2.18%、0.94%,从工程的角度而言一般是可以接受的。图6给出了管道与15#支吊架连接位置输出振动响应的统计分布。
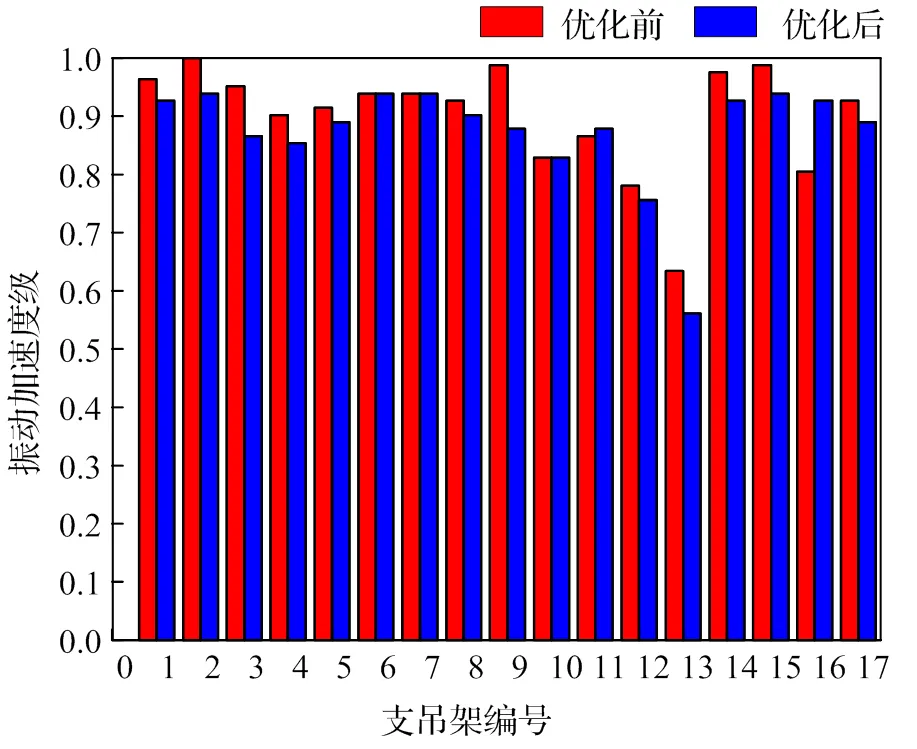
图5 优化结果对比
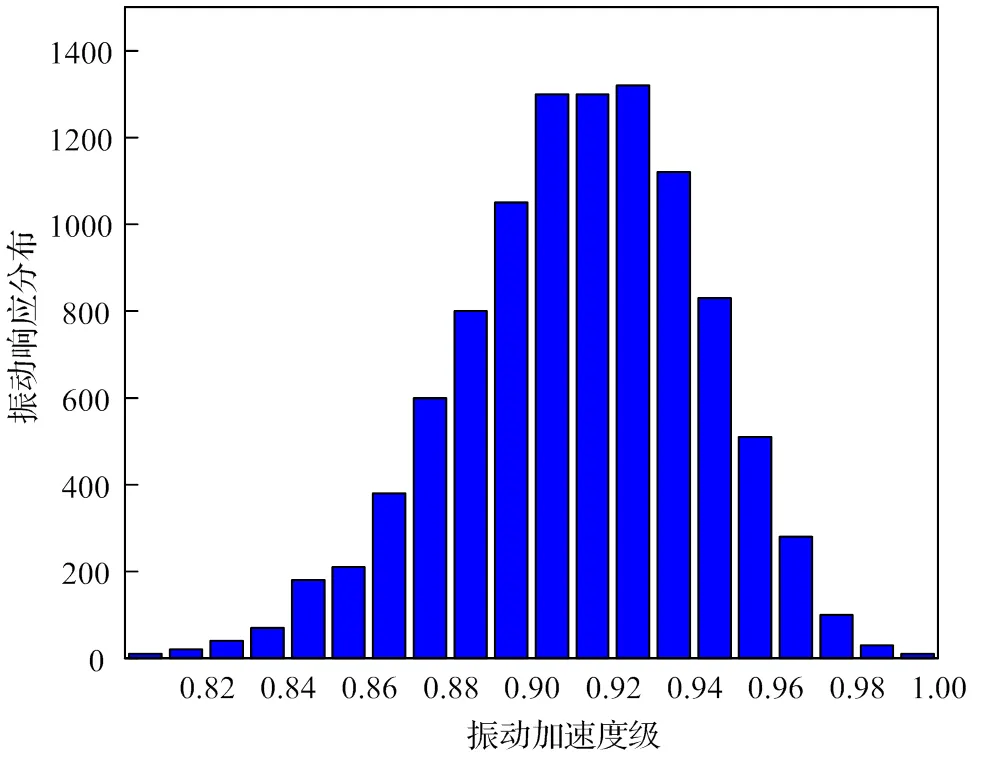
图6 15#支吊架振动响应统计分布
6 结论
本文以某管道系统为研究对象,通过布置含平动和转动自由度的动力吸振器,开展简谐激励下的振动控制研究。首先通过分层抽样的方法对输入参数进行采样,建立了从动力吸振器布置参数到管道支吊架位置振动响应的输入输出关系。基于采样数据建立了输入输出关系的代理模型,并进行了参数相关性分析,考察了系统响应随各输入参数变化的规律。采用全局高效响应面算法对动力吸振器的布置参数进行了优化,得到了最优解,实现了低频段内管道系统的振动被动控制,并考察了最优设计方案优化方案的鲁棒性。
[1]余栋栋,何立东,冀沛尧. 阻尼减振技术在管道上应用研究[J]. 噪声与振动控制,2017,37(6):186-189.
[2]杨恺,张针粒. 基于反共振原理的管道吸振器调谐方法[J]. 振动与噪声控制,2017,37(5):55-60.
[3]熊夫睿,叶献辉,冯志鹏. 非均匀梁结构减振降噪吸振装置的多目标优化设计[J]. 噪声与振动控制,2017,37(6):199-205.
[4]Yu H,Chung C Y,Wong K P,et al. Probabilistic load flow evaluation with hybrid Latin hypercube sampling and Cholesky decomposition [J].IEEE Transactions on Power Systems,2009,24(2):661-667.
[5]韩忠华. Kriging模型及代理优化算法研究进展[J]. 航空学报,2016,37(11):3197-3225.
[6]Enrica,Bernardini,Seymour,M.J. Spence,Daniel,Wei,et al. Aerodynamic shape optimization of civil structures: A CFD-enabled Kriging-based approach[J] J. Wind Eng. Ind. Aerodyn.,2015(144):154-164.
[7]Freier L,Wiechert W,Von Lieres E. Kriging with trend functions nonlinear in their parameters: Theory and application in enzyme kinetics [J]. Engineering in Life Sciences,2017,17(8):916-922.
[8]盛骤. 概率论与数理统计[M]. 3版. 北京:高等教育出版社,2001.
[9]李坚. 代理模型近似技术研究及其在结构可靠度分析中的应用[D]. 上海:上海交通大学,2013.
[10]Jiandong Zhou,M. Hatami,Dongxing Song,et al. Design of microchannel heat sink with wavy channel and its time-efficient optimization with combined RSM and FVM methods[J]. International Journal of Heat and Mass Transfer,2016(103):715-724.
[11]R. Soundararajan,A. Ramesh,N. Mohanraj,et al. An investigation of material removal rate and surface roughness of squeeze casted A413 alloy on WEDM by multi response optimization using RSM[J]. Journal of Alloys & Compounds,2016(685):533-545.
[12]Jeong S,Obayashi S. Efficient Global Optimization (EGO) for Multi-Objective Problem and Data Mining[C] IEEE Congress on Evolutionary Computation,2005.
[13]Jones D R. A Taxonomy of global optimization methods based on response surfaces[J]. Journal of Global Optimization,2001,21(4):345-383.
[14]高伟钊,莫旭辉,付锐,等. 基于Kriging的泡沫填充锥形薄壁结构耐撞性6σ稳健性优化设计[J]. 固体力学学报,2012,33(4):370-378.
[15]孙光永,李光耀,张勇,等. 基于鲁棒性的概率优化设计在薄壁构件耐撞性中的应用[J]. 中国机械工程学报,2007,18(4): 479-483.
Multi-objective Optimal Design of Dynamic Vibration Absorber for Vibration Reduction of Piping System
WANG Bihao,XIONG Furui,HUANG Qian,ZHANG Wenzheng
(Science and Technology on Reactor System Design Technology Laboratory, Nuclear Power Institute of China, Chengdu 610213, China)
The dynamic vibration absorber (DVA) is known for its capability on reducing pipe vibration under specific frequencies, which is a significant characteristic of vibration of pipeline system in industrial equipment. A type of dynamic vibration absorber (DVA) with translational and rotational degree of freedoms (DOFs) is introduced for reducing pipe vibration under specific frequencies. First of all, the piping system is modeled with beam elements and DVAs is modeled with mass-spring elements. In this model, kinematic equations of DVAs are coupled with the beams. Then, Latin Hypercube Sampling (LHS) technique is applied to sample data points and the input-output relationship that characterizes the mapping from parameters of DVAs to vibration response is established. The surrogate model is constructed based on the points. Kriging interpolation is applied for the data-driven model. The optimization is achieved via Efficient Global Optimization (EGO) algorithm to fine tune the deployment strategy with maximum vibration reduction at several locations. The optimization variables include the location of vibrations absorbers and stiffness parameters. The robustness of the obtained optimal design scheme is evaluated to examine the influence of each design parameter on each output variable when it is disturbed.
multi-objective optimization;dynamic vibration absorber;surrogate model;vibration and noise reduction;correlation analysis
TB 535.1
A
10.3969/j.issn.1006-0316.2020.06.002
1006-0316 (2020) 06-0010-08
2020-02-18
国家自然科学基金项目(51606180;11872060)
王碧浩(1988-),男,四川巴中人,硕士研究生,工程师,主要研究方向为反应堆结构力学分析和优化,E-mail:wangbhao@126.com。
