基于响应面的码垛机器人承载体多目标优化
2020-07-16刘光辉殷鸣尹湘云殷国富
刘光辉,殷鸣,尹湘云,殷国富
基于响应面的码垛机器人承载体多目标优化
刘光辉,殷鸣*,尹湘云,殷国富
(四川大学 机械工程学院,四川 成都 610065)
针对4自由度码垛机器人承载体结构轻量化设计的需要,在对码垛机器人腕部旋转部分结构设计和受力体末端执行器承载体动态性能分析的基础上,建立了一种将多目标优化和响应面优化相结合的优化算法,以承载体的尺寸作为设计变量,以承载体的刚度、强度、一阶频率、质量最轻为优化目标进行优化设计,优化的结果表明:优化后的质量的到明显减少,一阶固有频率有所提高,变形量有所减小,强度有所增大,但不影响其性能,达到轻量化的优化效果。
码垛机器人;轻量化;多目标优化;响应面优化
在码垛机器人研究中,各部分结构的设计直接影响到机器人的性能。轻量化设计作为一个重要的属性被提出来,通过减少质量或惯量,同时频率增高、变形量减小、强度提高,提高结构的稳定性能[1]。李锦忠等[2]用有限元和拓扑联合优化的方法对码垛及亲人整体进行优化。Albert Albers等[3]对机器人胸部进行结构拓扑优化实行轻量化。张大江[4]的多目标对料袋码垛机器人臂部进行结构优化,贺莹等[5]利用Box-Behnken和RSM方法建立目标函数和约束函数的RSM模型对码垛机器人腰部支撑架进行优化设计。建立在这些研究的前提上,本文提出一种多目标与响应面相结合的方法对其腕部进行优化设计。
1 腕部旋转结构设计
腕部旋转结构如图1所示,末端执行器承载体的轴肩通过螺栓固定在腕部支撑座上,承载体主要安装推力球轴承和旋转轴,对其起到固定和支撑的作用。其中承载体的内径=130 mm,轴肩外径与轴径之差2=40 mm,壁厚1=40 mm,轴肩2=15 mm,承载部分1=10 mm、3=60 mm。伺服电机安装在支撑板上面,而减速器对应的安装在支撑板下面,减速器的末端用联轴器与旋转输出轴连接,带动轴的旋转。因为主要承受轴向载荷,故选用推力球轴承与其配合。轴的末端连接法兰盘,轴的旋转带动法兰盘的旋转,法兰盘连接末端执行器,这样就可以按照要求对物体任意摆放。
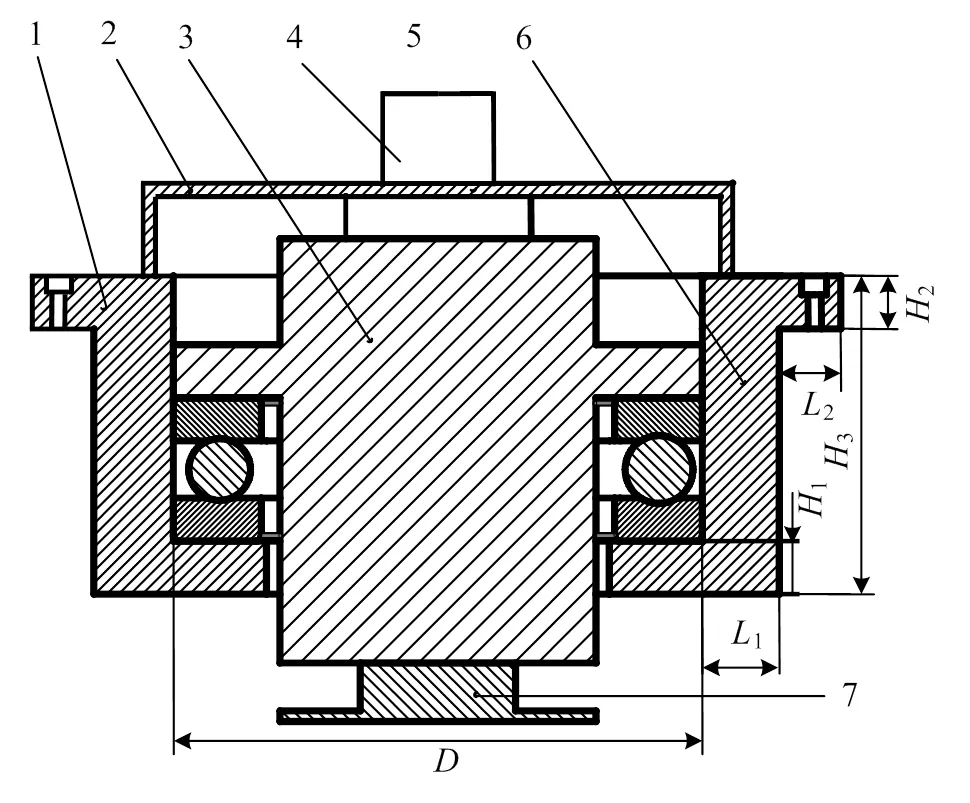
1.末端执行器承载体 2.支撑板 3.旋转输出轴 4.伺服电机 5.减速器 6.推力球轴承 7.法兰盘
2 末端执行器承载体优化
2.1 静力学分析
承载体上连接着末端执行器且承受着复杂、交变、抓取物等载荷,其动、静态特性的优劣对机器人的性能具有重要影响,因此刚度、强度和振动稳定性是承载体设计过程中必须考虑的重要指标[6]。为了使模型在实际计算的过程中简单化并且使分析效率提高,需要对模型进行简化,承载体去除了其内表面的轴承、转轴、末端执行器等装置去掉零件的圆角、螺纹孔倒角等特征,简化的模型如图2,承载体所选的材料为45号钢,质量为13.344 kg,其材料属性如表1所示。
图2 末端承载体简化模型
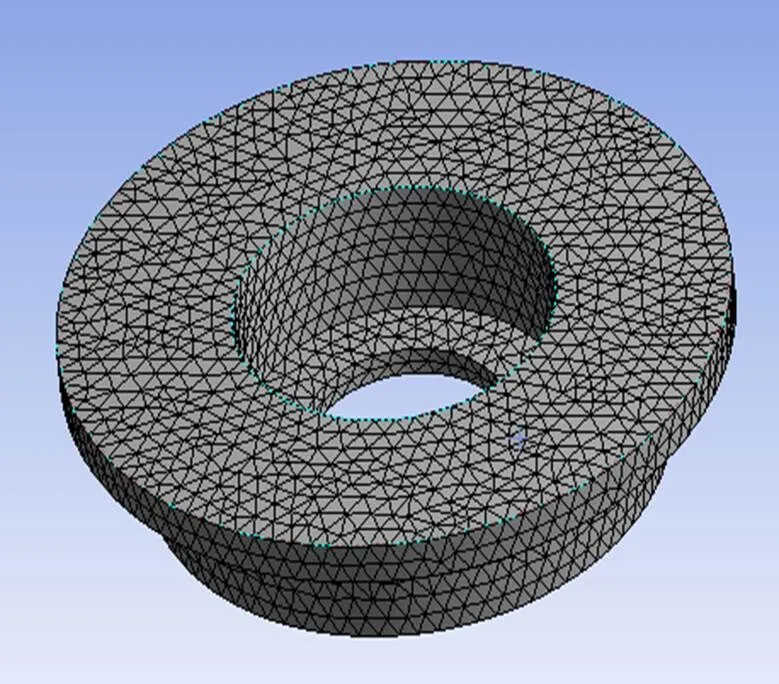
图3 承载体有限元模型
首先对承载体进行网格划分,先采用软件默认的Program Controlled划分,然后采用Quadratic进一步划分,为了让计算更加的准确性采用了Body Sizing。网格划分单元数:30 092,节点数:46 156。有限元模型如图3所示。

表1 材料属性
由于承载体上承载着旋转轴、轴承、法兰盘、末端执行器以及抓取的物体等负载,根据实际的要求,通过计算出得知承载体上的总的负载为1000 N。然后在Workbench中施加约束后对图3的模型进行仿真得出承载体的变形和等效应力如图4、图5所示。
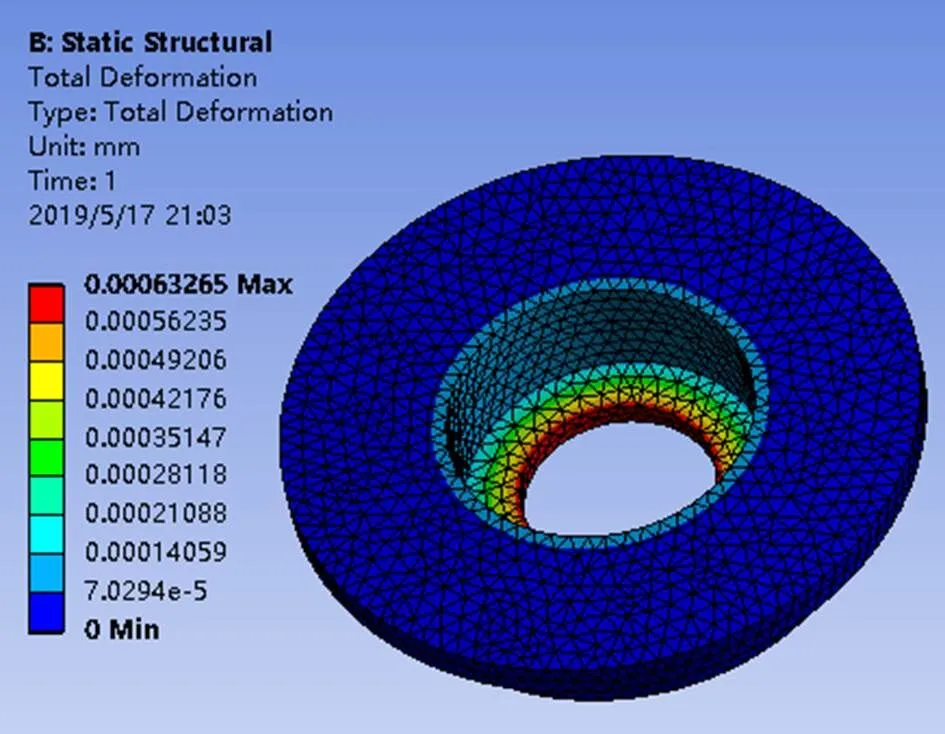
图4 承载体应变图
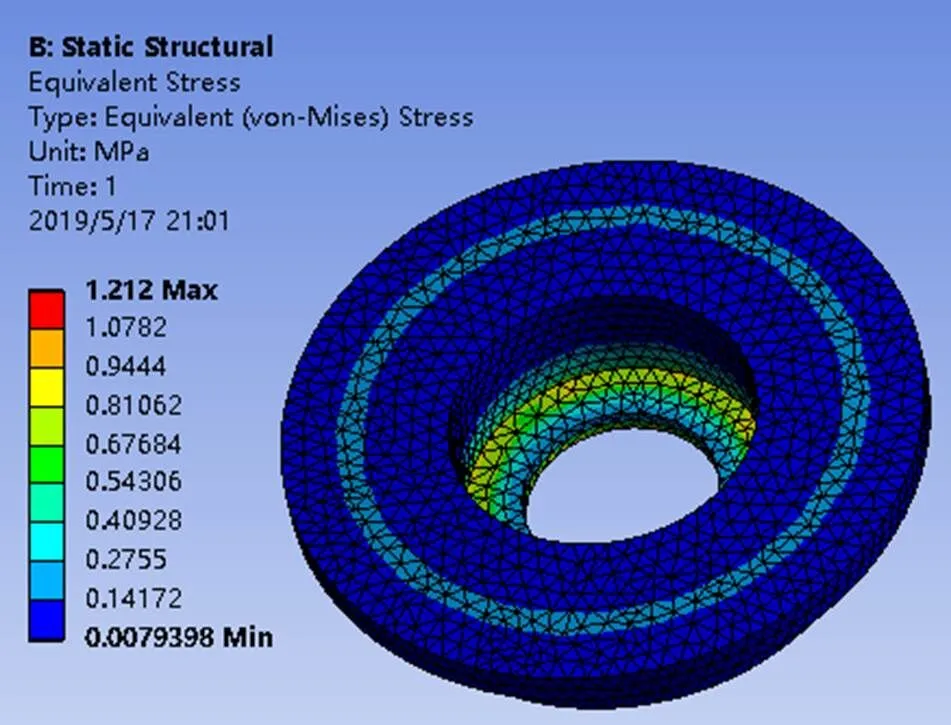
图5 承载体等效应力图
从图5中左边可以看出:承载体的最大应1.212 MPa,位于台阶外圆边缘,应该是模型简化过程中删除倒角所致。由表1知取45号钢的屈服强度大于355 MPa,取为355 MPa参考机械设计手册取许用安全系数[]=2,计算出许用应力为[]=177.5 MPa,远远大于承载体的最大应力。从图4右边可以看出承载体的最大变形为6.3235×10-4mm,变形量很小,发生在台阶内圆边缘上。综合以上的结果表明承载体在当前的作用下,强度、刚度都满足要求,并且还有很大的余量。因此可以考虑从尺寸上优化,在满足条件的同时,使其质量减轻。
2.2 模态分析
模态分析模态分析是一种常用的研究结构动力特性的一种方法,它可以用来确定系统的振动特性、即结构的频率和振型[7]。尺寸改变可能带来固有频率的改变,如果固有频率过小,则会与电机转动引起共振。为了避免共振的发生,结构优化过程中必须要考虑动态特性,因此对承载体进行模态分析。在优化的过程中,频率的优化也是一个比较重要的约束条件。在静力学分析的基础上,加入模态分析,分析出前六阶模态如表2所示。

表2 承载体前六阶模态
从图中可以看出承载体的一阶固有频率就达到880.5 Hz,而腕部电机的最高转速为3000 r/min,其频率为50 Hz。承载体的固有频率远大于转轴转动的频率,因此,承载体的尺寸方面有很大的优化空间。
2.3 承载体多目标优化
从以上的静力学和模态分析知,该模型可以从尺寸方面进一步优化。承载体结构尺寸的优化采用Workbench中的目标驱动优化模块,承载体优化采用目标驱动优化与响应面相结合的设计。Design Explorer通过实验设计DOE和响应曲面Reponse Surface技术来描述设计变量和优化目标之间的关系,通过实验设计方法产生多种数据,再用设计变量的参数来研究设计变量对优化目标的影响,但因一般输入设计点数是有限的,所以通过有限个设计点拟合成响应曲面(线)进行研究[8],最终就可以得到一个较优化的值。
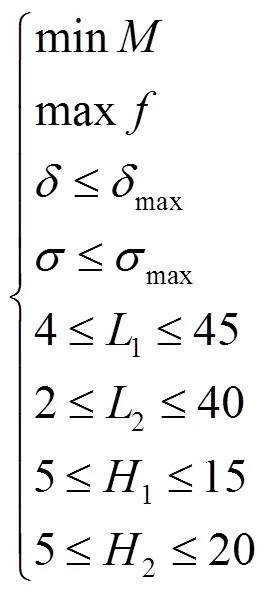
选取以上轴肩外径与轴径之差2、壁厚1、轴肩2、内部台阶高度1作为参数的设计变量,以承载体的刚度≤max=0.0006 mm、强度≤max=5 MPa为约束条件,以一阶频率要高、质量最轻为优化目标进行优化设计,建立优化的数学模型[9]为:
2.3.1响应面法理论
相应面法就是采用一种数学的方法,通过一个近似的表达式来表达出所需要的功能函数,功能函数是通过一定的数据通过线性或二次多项式的形式拟合,得到一个性能值与各数据的响应函数[10]。在实际的计算过程中,经常会用到数学里的多次线性插值,插值函数为:
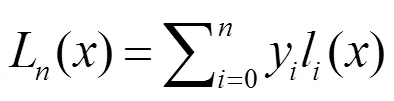
式中:L()为变量的函数;l()为的基函数;y为系数。
首先用多种数据计算得到插值函数L(),然后对设计的变量约束下,得到最优的输出变量,也就是较优响应结果。
2.3.2响应面优化

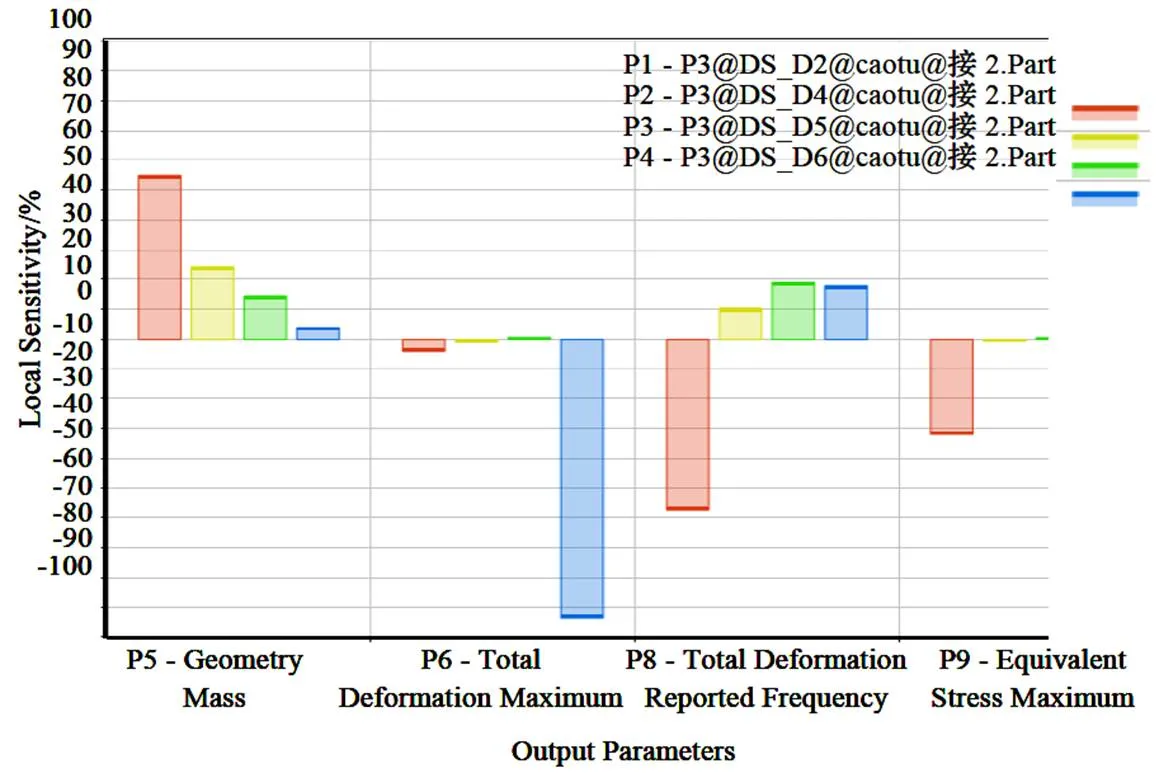
图6 各参数对输出结果灵敏度
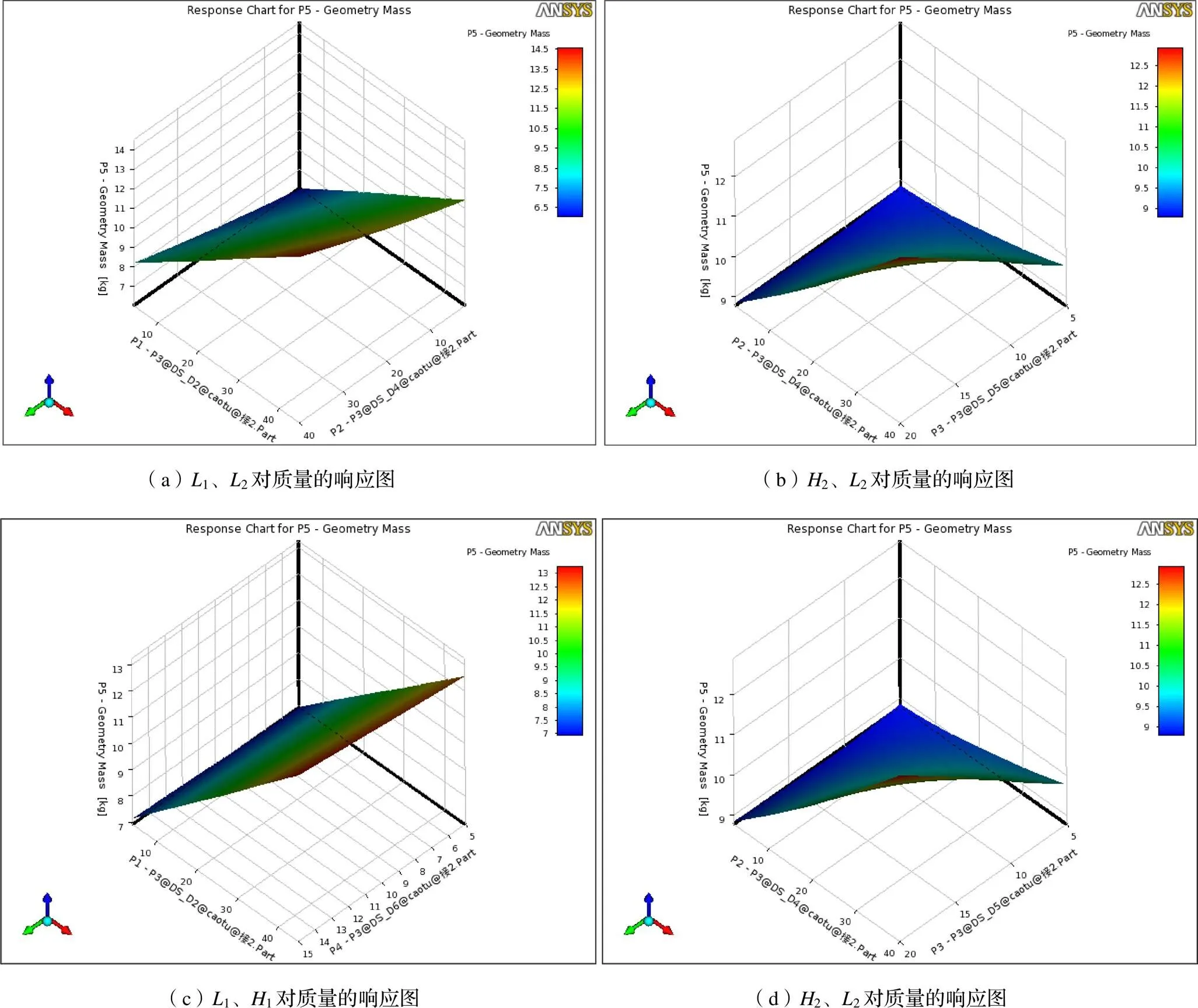
通过响应曲线图,可以知道哪几个参数对质量的影响比较大。从以上25组数据中,进一步设定优化目标质量、频率、变形、应力进行优化,以质量最小、≤max=0.0006 mm、≤max=5 MPa为约束条件,建立与四个尺寸的的响应函数进行优化得到下面三组候选数据如表3所示。以质量最小为最先优化目标,选取第一组数据为优化结果,取1=10 mm、2=8 mm、2=7 mm、1=14 mm导入模型计算对比优化前后的参数如表4所示。

表3 优化结果

表4 优化前后的参数对比
3 结论
(1)完成了腕部旋转结构的设计,并对相应的结构进行了静力学、模态分析,分析出来的结果均能满足设计要求。
(2)在满足实际要求的情况下,分析结构承载体的结构和工况,确定优化的参数,对结构体进行多目标的优化,运动多目标驱动优化与响应面优化相结合对其结构尺寸进行优化,并得到优化的参数。
(3)优化后的尺寸明显减小,优化后的质量减少46.7%,变形量减小了,虽然应力增大了,不影响其性能,一阶固有频率有所增大。
[1]王春华,安达,赵东辉. 工业机器人臂部静动态多目标拓扑优化设计研究[J]. 机械科学与技术, 2016,35(2):241-246.
[2]李锦忠,唐宇存,陆秋龙,等. 有限元和拓扑联合优化方法及其在机器人结构轻量化设计中的应用[J]. 机械科学与技术,2019(2):14-16.
[3]Albers A, Ottnad J,Weiler H,et al. Methods for lightweight design of mechanical components in humanoid robots[C]. Ieee-Ras International Conference on Humanoid Robots. IEEE,2008:609-615.
[4]张大江. 料袋码垛机器人臂部结构优化[D]. 哈尔滨:哈尔滨工业大学,2018.
[5]贺莹,梅江平,孙玉德,等. MD-1200YJ码垛机器人腰部支架的多目标结构优化设计[J]. 食品与机械,2018(2):87-88.
[6]王启义. 中国机械设计大赛:第三卷 [M]. 南昌:江西科学技术出版社,2002:1421-1422.
[7]吕涛涛,王玲,殷国富,等. 伸缩皮带运输机机架在不同工作状况下的结构仿真分析[J]. 机械,2019(2):46-50.
[8]黄志新,刘成柱. ANSYS Workbench 14.0超级学习手册[M]. 北京:人民邮电出版社,2013.
[9]傅旻,林立峰. 钢板热处理前标识设备支撑横梁的强度分析及优化设计[J]. 机械设计与制造,2016(4):94-97.
[10]宋俨轩,殷鸣,江卫锋. 基于响应面的带式输送机桁架结构截面优化[J]. 煤矿机械,2017(4):67-70.
Multi-Objective Optimization of Carrier Structure of Palletizing Robot Using Response Surface Methodology
LIU Guanghui,YIN Ming,YIN Xiangyun,YIN Guofu
( School of Mechanical Engineering, Sichuan University, Chengdu 610065, China)
In order to meet the need of lightweight design of the carrier structure of the 4-degree-of-freedom palletizing robot, the paper analyzes the structural design of the rotating part and the dynamic performance of the carrier at the end of the bearing body. The present work addresses an optimization algorithm combining multi-objective optimization with response surface optimization. The size of the carrier is taken as the design variable, and the stiffness, strength, first-order frequencyand massof the carrier are taken as the optimization objectives. The results show that the optimal solution has guaranteed significant weight decreases, raising the first order natural frequency, declining the deformation, and increasing the strength. The performance is not affected, hence the objective of lightweight optimization is achieved.
palletizing robot;lightweight;multi-objective optimization;response-surface optimization
TH16
A
10.3969/j.issn.1006-0316.2020.06.009
1006-0316 (2020) 06-0056-06
2019-10-30
四川省科技计划项目(2018GZ0111)
刘光辉(1992-),男,湖北孝感人,硕士研究生,主要研究方向为智能制造。
殷鸣(1987-),男,四川成都人,博士,副教授,主要研究方向为增材制造技术和智能制造,E-mail:mingyin@scu.edu.cn。
