航空无人机动力系统降噪分析
2020-07-09于涛阎雷雨
于涛 阎雷雨


摘要:为有效解决航空无人机动力系统噪声过大问题,设计了低噪声无人机系统与动力系统降噪装置。由于噪声是基于震动生成的,因此低噪声无人机系统利用震动采集装置采集电机震动频率,以逆压电效应,控制器以震动频率控制装置生成与其相反的反向震动,以此与电机震动相互抵消,实现噪声控制。而降噪装置与无人机主体侧端四个角度均衡等距衔接的连接杆顶端相互对接,风扇固定安装于其上端,固定板固定于其内部,弹簧安设于固定板上端,减震板配置于弹簧上层,橡胶皮垫安置于减震板上端。基于风扇装置可实现降噪整体性能优化,基于降噪装置可实现减振综合性能提升,以此使得航空无人机动力系统实现有效降噪。
关键词:航空;无人机;动力系统;降噪
中图分类号:V279
文献标识码:A
文章编号:1001-5922(2020)06-0176-03
既有航空无人机由于结构与材料等各种客观因素,在飞行时极易生产过大噪声,然而在现代化无人机实际应用中,其中部分对于无人机噪声的要求十分明确严格,即需基于低噪声环境采集图像,无人机飞行位置过高,图像采集清晰度将会降低,飞行位置过低,则会生成较大噪声。航空无人机噪声的主要来源是动力系统的电机,电机高速运行导致其舱内出现震动现象,以此引发过大噪声[1]。据此,面向电机噪声,设计了低噪声无人机系统与降噪装置,以期能在不影响无人机正常稳定运行的基础上,有效实现降噪目标。
1 航空无人机动力系统分析
1.1 动力系统特性
电动固旋翼无人机任务剖面主要分为垂直起降、过渡转换和水平飞行3个阶段。垂直起降阶段只有四旋翼动力系统起动,过渡转换阶段固定翼推进动力系统起动并逐渐增大电动机转速用以无人机的水平加速,四旋翼动力系统维持无人机的姿态稳定且电动机转速逐渐降低,当无人机水平速度达到巡航速度时,四旋翼电动机彻底关闭,进入水平飞行阶段。
航空无人机的飞行剖面,即垂直起降、过渡转换、水平飞行。其中,垂直起降阶段只涉猎四旋翼动力系统起动,过度转换阶段可促使动力系统起动,且逐步加大电机转速,以无人机水平加速度,动力系统维持无人机姿势稳定性,动机转速逐步下降,在无人机水平速度逐渐上升到巡航速度,电机则完全关闭,开始水平飞行。由此可知,垂直起降与水平飞行环节,航空无人机动力系统运行处于彼此独立形态,而过渡阶段时动力系统同时运行,但此阶段耗时非常短。为避免推进桨转动受干扰,电机系统一般分散分布,其中桨盘范围不会重合,且为防止机体结构影响螺旋桨升力,桨盘圆柱面所处范围一般会与机体结构相分离[2]。
1.2 動力系统噪声组成
无人机即通过无线电遥控设施与程序控制装置操控不载人的人机。在无人机行业快速发展趋势下,其需求顺势增大,无人机使用环境复杂,覆盖范围与人群较广,安全稳定防范要求较高。航空无人机动力系统噪声主要是由旋翼气动噪声与电机噪声所构成,就电机噪声而言,主要是螺旋桨与电机转动造成震动频率,以此严重影响飞机控制系统,极易导致接收错误信号,造成无人机失控,从而损坏或者坠毁。其降噪处理集中于电机结构优化与机械震动噪声降低层面[3]。
2 低噪声航空无人机系统设计
2.1 系统结构
低噪声航空无人机主要是机架与机臂构成,基于机臂安设电机舱,舱内电机以驱动螺旋桨转动,且内壁与底部设置震动采集装置,其以传输线为载体衔接控制器,控制器的作用即驱动采集装置发生自振,与电机震动相互抵消。震动采集装置通过采集电机震动频率,并将其传输于控制器,控制器基于震动频率控制装置生成与震动频率相反频率的震动,以此抵消电机震动。通过低噪声航空无人机,可有效降低航空无人机电机噪声,且不会影响其质量轻重。低噪声航空无人机系统结构[4]具体如图1所示。
2.2 震动采集装置
震动采集装置基于压电效应感应转换电机机械震动为电压信号,不会受环境噪声等的影响。控制器通过电压信号频谱分析,获得电机震动频率,据此生成反向频率。控制器以反向频率为载体生成对应电压信号,装置通过逆压电效应生成反向震动,以与电机震动相互抵消,实现噪声控制。
震动采集装置主要划分为第一震动采集装置与第二震动采集装置,前者安装于电机与电机舱底部间;后者安装于电机与电机舱侧壁间,二者输出端分别衔接于控制器。
2.3 压电薄膜
由于单块压电薄膜生成的电压、电荷信号过小,多块压电薄膜(聚偏氟乙烯制成)实现并联可获取较大电荷信号,且放大器可充分发挥作用放大压电薄膜生成的微小信号。因此,选用多块压电薄膜,以并联与放大器为载体,放大电压、电荷信号,以实现控制器有效控制噪声。
聚偏氟乙烯制成压电薄膜,温度稳定,使得电机高温不会造成严重影响,且其机械性能强度高度,难以损坏,质量轻,可避免影响航空无人机整体重量。
2.4 电机舱
电机舱侧壁开设过线孔,震动采集装置传输线基于此与控制器相互对接,且便于舱内电机与震动采集装置之间的合理布线。在舱底与侧壁开设两个过线孔,两个震动采集装置传输线分别穿过过线孔,以衔接于控制器。同时,在顶部开设多个散热孔,其可排除电机热量,降低舱内温度。而且顶部设有轴承,传动轴基于其衔接于螺旋桨,以此可有效降低传动轴与电机舱之间的摩擦损耗,控制噪声[5-6]。
2.5 噪声控制流程
低噪声航空无人机动力系统电机生成噪声的有效控制流程[7]具体如图2所示。
3 降噪装置设计
3.1 降噪装置结构
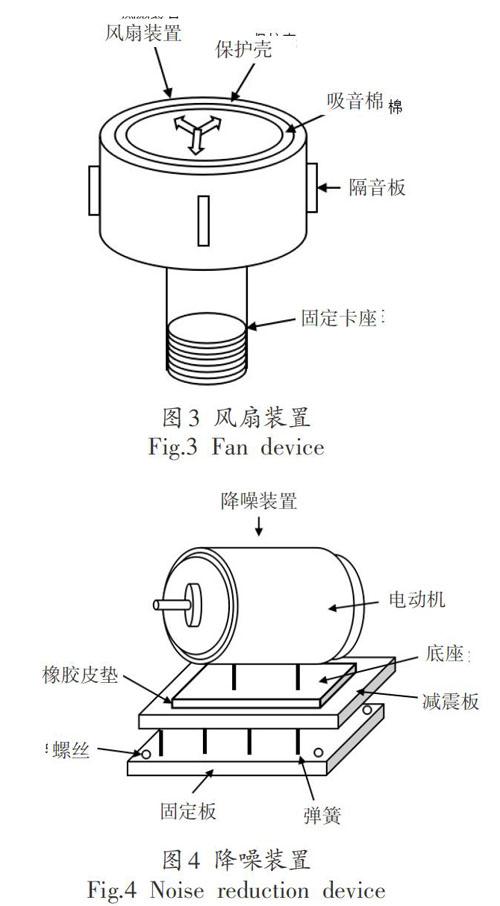
航空无人机动力系统降噪装置包含航空无人机主体,侧端4个角度均衡等距配置连接杆;顶端安设降噪装置;上端设置风扇装置;底端安装支撑杆,支撑杆的底端配备滑轮。
降噪装置内部主要包含弹簧、底座、固定板、减震板、固定螺丝、电机、橡胶皮垫等,其中,固定板基于装置内部固定;固定螺丝则衔接于板上端4个角度;弹簧固定于板上端面;减震板固定于弹簧上端面;橡胶皮垫固定于减震板上端面;底座贯穿皮垫始终,固定于减震板上端面。
