应用于无人船课程教学的水面航行器水样采集装置设计
2020-06-09
(上海海洋大学,上海 201306)
近年来我国工业农业突飞猛进,随之带来一系列水质污染问题。我国的水环境问题十分严峻,长江、黄河也出现了许多水质问题,黄河的断流,泥沙淤积十分严重,长江支流水量锐减,每年排入长江的污水达到220亿吨,这个量达到了全国污水排放量的三分之一,黄金水道变成了绵延在中国大地上的污染带,自我净化能力已经不足以修复自身了。
水质监测主要通过人力采样,带回监测站化验检测并进行数据分析。这种方法缺点很多,时效性差,从采样到化验,再到数据分析,样品的水质特性可能已经发生变化。水质抽样不具有普遍性,不能检测整个水域,水质自动检测系统应运而生,凭借互联网的发展,实现了智能化。全球定位系统和无线局域网,卫星通讯技术的成熟,研究者开始设计一种无人船代替人力,进行水质监测和实时测量。
多年的研究表明,目前国内外对无人船的主要技术难关有以下几处:
(1)无人船动力以及自动航行技术:在水面复杂的情况下,对船只航行、航速的控制尤为重要。
(2)无人船自动导航:根据其工作地点、目标方位、运行要求合理规划航行路径。
(3)无线通讯技术:无人船如何与地面基站进行信息传递,确保传递准确、快速、抗干扰。
针对这些技术难关,提出了水面航行器水样采集装置设计,主要从船体结构、传感器模块、通讯模块、GPS模块、界面设计好人接口设计方面进行优化。
1 船体结构
无人船装置设置多个模块,包括核心处理器、电源、传感器、通讯器和软件显示,船体模型如图1所示,该船为双体船,为多层构造,从上而下依次安装各模块。最顶端安装雷达,用于障碍物躲避和航行功能;其下安装摄像头,通过无线传输,给软件端传输实时画面;船舱中的核心处理器部分为传感器,所有传感器都安装在船底,便于采样处理。

图1 无人船外观图
2 传感器模块
2.1 溶解氧传感器
本课程设计的无人船采用的是RDO-206溶解氧数字式传感器,量程为0~20mg/L,分辨率可到达0.01mg/L,精度可达测量值2%范围内,采用12~24VDC供电,内置温度传感器,自动进行温度补偿,重350g,防护等级IP68。测量方法为荧光法,荧光法测溶解氧的原理是基于物理学中特定物质对活性荧光的猝熄原理,荧光法测试原理图如图2所示。传感器的一个发光二极管发射的蓝光照在荧光帽内表面的荧光物质上,其表面的荧光物质受到激发,发出红光,通过计算红蓝光之间的相位差,对比内部标定值,便可以计算出氧分子浓度,再经由自动补偿可以输出最终结果。
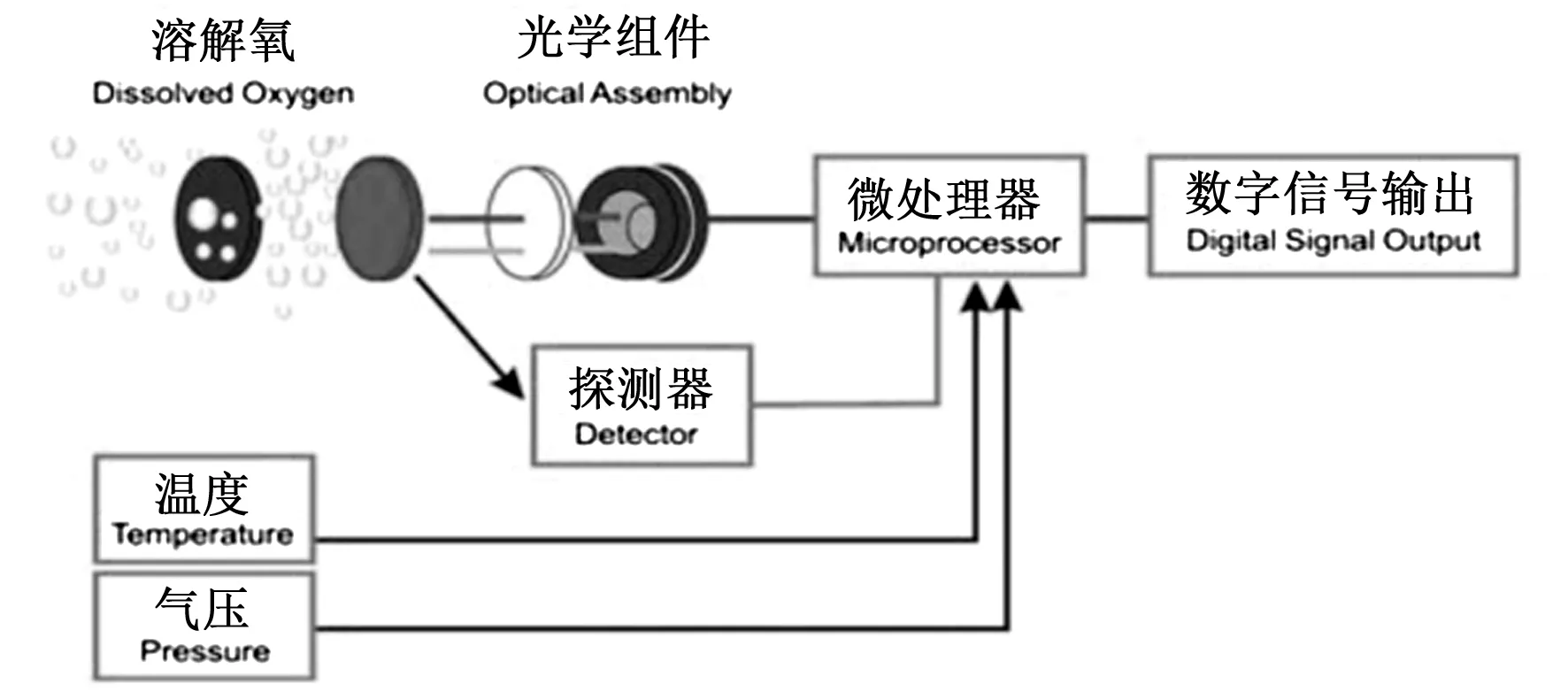
图2 荧光法测试原理图
2.2 PH传感器
PH值对水质的影响主要在以下几个方面:PH值变化导致碳酸盐类物质沉积,出现腐蚀管道的问题。PH值影响微生物生长,PH值在5.5~8.2时最适合铁细菌的繁殖,进而导致“红水”现象。PH值过高过低都产生影响,PH低于7时,会散发刺激性味道,高于7时,水质产生苦味,色度增加。国家规定,PH值应控制在6.5~8.5之间。
为了检测PH值,人们采取了诸多手段,如试剂法、滴定法、仪器测量法等。本无人船采用PHG-202 PH传感器,如图3所示,该传感器量程广,精度达到了0.01PH,工作环境温度为0~65℃,自带温度补偿,防护等级达IP68,满足功能需求。

图3 PH传感器
2.3 浊度传感器
浊度,即溶液对光线通过时产生的阻碍程度,包括悬浮物质对光的散射和溶质分子对光的吸收。浊度的主要影响因子有:悬浮物质的含量,大小,形状以及折射系数。测量浊度需要尽快,在测定前需要摇动水样,等待恢复室温之后测定。浊度的高低不直接表明水质污染程度,但是可以直观地让人们明白,水质变坏了。
浊度测量有多种方法,主流的有以下几种:比浊法或射光法、浊度计测量法。目前被广泛认可的是浊度计测量,其主要原理是通过浊度计发出光线,光线穿过样品溶液,在与入射光线呈90°方向上检测有多少光在水中被散射掉了。本船采用的是InPro8050浊度传感器,采用逆向散射,单光纤的结构,此传感器测试原理图如图4所示。

图4 浊度计测试原理图
3 通讯模块
本设计的无人船试用的范围是小型湖泊,范围较小,试用WIFI作为通讯方式比较合理。无人船搭载的是ATK-ESP8266 WIFI模块,内置TCP/IP协议栈,传统串口设备通过简单配置,就可以通过WIFI传输数据,WIFI模块原理图如图5所示。

图5 WiFi模块原理图
8266 WiFi模块很贴心地设置了透传模式,省去很多麻烦,我们只要设置好该模式,数据传输就可以实现了。
(1)使用AT+CWMODE=1,设置模式为SAT
系统反馈:OK
(2)使用AT+RST重启模块,等待4秒。
系统反馈:OK
(3)使用AT+CWJAP=“SSID”,“PASSWORD”,连接路由器WIFI,之后会获取一个IP地址。
(4)电脑创建一个server。
(5)使用AT+CIPSTART=“TCP”将模块和server连接起来,输入IP
系统反馈:CONNECT
(6)设置模块断电后自动进入透传模式,使用AT+SAVETRANSLINK=1,IP地址,端口号,“TCP”指令,模块自动断电再启动后已经进入透传模式,无需再次设置。
(7)使用AT+CIPMODE=1指令开启透传模式。
系统反馈:OK
(8)使用AT+CIPSEND指令,开始数据传输。
系统反馈:OK
使用+++指令,退出透传模式。
4 雷达模块
无人船采用的是国产RPLIDAR A1 360°激光扫描测距雷达,雷达结构如图6所示,可实现平面内半径6m全方位扫描,自动生成扫描平面信息。采样周期设定为1450点/周的情况下,扫描频率可达5.5Hz,扫描频率最高可达10Hz。该型号的激光雷达采用激光三角测距技术,结合高速的视觉采集处理结构,可以实现每秒8000次以上的测距动作。每一次测距动作,雷达将发射红外激光信号,激光信号向外发射的过程中遇到障碍物后产生散射,一些反射光会被视觉采集系统接收到,通过DSP处理器计算,障碍物和雷达的距离和角度信息会从通讯接口输出。

图6 雷达结构图
5 界面设计和接口设计
硬件设备的发展也带动了软件程序的发展,人们需要各式各样的、全面的、精确的软件来监测无人船的航行状况。在本课题设计中,需求有以下几点:
(1)实时画面:要求无人船安装摄像头,传输画面到软件上,便于操作人员观察水域状况并规划航线。
(2)雷达画面:要求无人船安装雷达,传输雷达扫描图到软件,标注障碍物的相对位置。
(3)传感器参数:包括安装在船底的各个传感器,传输数据到软件界面,也包括参数的动态曲线。
(4)基本操控:设置前后左右制动按钮,便于调试和实验。
基于以上几个基本要求,我们选择QT作为软件平台编写程序,QT是一款跨平台C++图形用户界面应用程序,可以用来开发GUI程序,也可以用于开发控制台,服务器等非GUI程序。QT是面向对象的开发工具,可拓展。QT Creator 是基于QT的跨平台集成开发环境,包括项目生成代码,自动编译高级C++代码。
5.1 界面设计
打开QT Creator,创建项目之后,就会出现这样的一组文件,以项目名称构成目录树,可以展开成多个项目,如图7所示。

图7 QT项目文件组成
从图中可以看出,一个完整的工程包括以下几种文件:(以1527117为例)
(1)1527117.pro是项目管理文件,包含项目的设置项等相关信息。
(2)(.h)是项目头文件,上图的项目中包含mainwindow.h是窗口的头文件。
(3)(.cpp)是项目内所有的C++源文件,图7的项目中有两个C++源文件,一个是main.cpp,是主函数文件,另一个是mainwindow.cpp是主窗口的实现文件,和mainwindow.h文件对应。
(4)(.ui)是项目内的界面文件,上图的项目中有一个mainwindow.ui,是窗口的界面文件,是本文的主要研究对象。
在QT Creator的编辑模式下打开maindow.ui文件,进入界面设计模式,如图8示。

图8 QT设计界面
该界面设计主要包括以下功能:
(1)实时视频功能:无人船上搭载的摄像头拍摄视频通过无线通讯,显示在界面上,设置了播放和关闭选项,体现了远程观察水面状况。
(2)端口连接:界面上显示无线局域网的端口号,设置了连接键,体现了连接状态可控制。
(3)传感器数据:界面上分别设置了四个主要传感器的显示框,显示水样检测的数据,体现了实时获知水质状况。
(4)地址:无人船搭载了GPS模块,界面上也设置了方位显示,体现了经度和纬度的实时显示。
(5)激光雷达:在界面上另一个主要的显示框是雷达检测的障碍物方位,以无人船为中心,标出了水面障碍的相对方位,体现了无人船的自动避障功能。
(6)方向控制:设置了前进,后退,左右键,体现了远程端对无人船可以实现操控。
5.2 接口设计
无人船与上位机之间主要通过无线通讯,采用TCP/IP协议,主要传感器的运作流程如下:

图9 传感器运行流程
TCP(传输控制协议)和IP(网际协议)提供了点对点的连接机制,包括数据如何封装,定址,传输,路由以及目标如何接受,制定了统一的标准。该协议将软件之间的通信过程抽象成四个抽象层,通过协议堆栈的方式,分别采用不同的通信协议。
使用QTcpSocket实现通信的基本流程大致可以概括为:
(1)建立QTcpServer模组,绑定socket套接字和端口号,用listen()语句创建监听连接,同时等客户端的连接请求。
(2)建立QTcpSocket,用connect()语句连接服务器和端口,发送连接请求。
(3)服务器用accept()语句接受连接请求,双发达成连接。
(4)客户端用send()语句发送数据给服务器。
(5)服务器用recv()语句应答并接受数据。
(6)服务器处理数据生成结果。
(7)客户端接受结果。
(8)多次重复(3)-(7)直至任务完成。
(9)断开连接
6 结 语
针对水质污染严重,传统检测方法效率低下的现象,提出了使用无人船代替人力进行水质检测,设计了基于QT的水质检测操纵平台。通过多传感器模块的组合,马达,激光,GPS模块的搭建,无人船的硬件部分由此组成了。借由ATK-ESP8266 WIFI模块进行连接,使用软件带有的QTcpSocket实现通信,得到的软件操控界面上,实现了多项参数的组合显示。
