基于应力分析法的水下液压机械手控制器可靠性预计*
2020-06-01赵嘉媛
赵嘉媛
基于应力分析法的水下液压机械手控制器可靠性预计*
赵嘉媛
(湖北三峡职业技术学院 机电工程学院,湖北 宜昌 443002)
水下液压机械手可以替代人类在深水环境下进行危险和复杂的工作,是水下航行器完成水下作业最主要的执行机构,机械手控制器根据水下航行器指控中心发布的命令完成机械手协调和指挥操作,其可靠性水平关系到水下航行器的安全性、可靠性。将可靠性理论中的应力分析法应用到某型水下液压机械手控制器可靠性预计过程中,并给出了实例。
水下液压机械手;控制器;应力分析法;可靠性预计
机械手是水下无人航行器ROV或UUV的重要组成部件,有了水下机械手,水下无人航行器就可以完成复杂的水下作业,如水下救生与打捞、海底样本采集以及国防军事领域等,水下机械手是国内外研究热点之一[1]。水下液压机械手是涉及机械、电气、控制、液压等多门交叉学科的产品,其组成较为复杂,是较为典型的机电液结合产品。随着水下航行器机械的功能越来越复杂、智能化程度越来越高、技术高端化和先进化,其组成和系统越来越复杂,对水下航行器机械手的可靠性要求也越来越高,因此对其可靠性研究有重要的现实意义。
水下使用液压系统不同于陆上和航空中使用液压系统,其特殊性主要为:水下液压系统应具有承受一定海水外压的强度,以适应不同水下无人航行器工作水深压力变化对液压系统结构和液压系统自身工作压力的要求;为满足水下无人航行器结构布置和质浮心要求,一般要求液压系统质量较轻,体积较小;为避免液压油泄漏而污染海洋环境、漏油使水下机器人质量和浮力发生变化,水下环境对液压系统的密封要求更高;海水腐蚀性对结构的耐腐蚀性能要求更高,以满足水下无人航行器在海水中、海洋飞溅区和海洋大气环境下长时间工作的要求[2]。
1 某型水下航行器液压机械手控制器
某型水下液压机械手系统采用分布式控制方式,相对于集中式控制系统,其具有的优点如下:①高可靠性。水下机器人中某个执行机构控制器出现故障时,不会导致水下机器人内其他功能的丧失。②便于维护。当水下机器人的某个执行机构控制器出现故障时,能快速找到故障原因,且在不影响水下机器人调试的情况下更换液压机械手控制器以迅速排除故障[3]。
水下液压机械手控制器原理如图1所示,所控制的机械手具有伸缩、摆动、锁紧等3个方向的液压缸动作,液压系统中使用了3个电磁阀,机械手控制器通过控制电磁阀、直流无刷电机,间接控制油缸和油泵,实现水下机械手伸缩、摆动等运动功能。控制器采用旋转电位计、直线电位计等测量伸缩、旋转液压缸的伸缩长度、摆动角度,并通过AD转换将长度模拟信号、摆动角度模拟信号转换为数字信号,经控制器计算后将控制量通过DA、线性隔离驱动液压阀实现液压机械手各关节的动作,主要功能有AD、DA、IO、CAN通信接口及辅助电路。
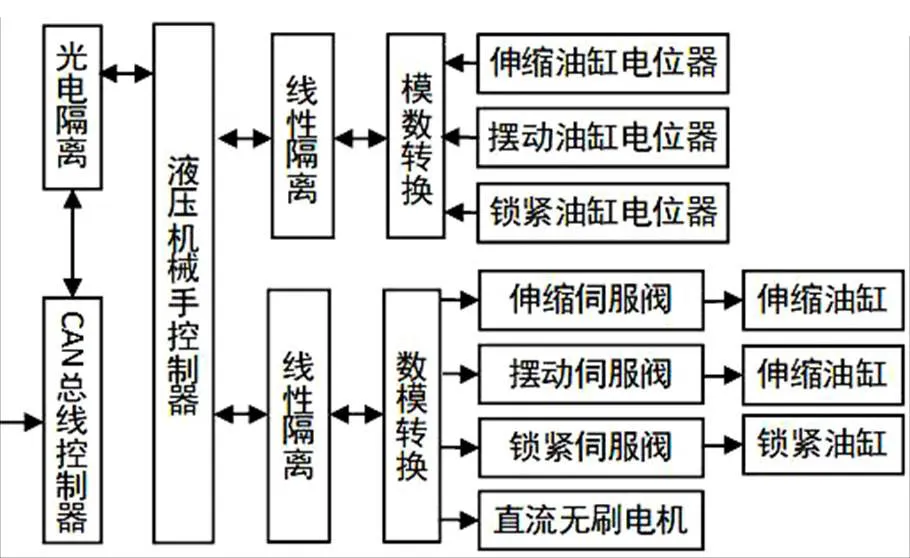
图1 某型水下液压机械手控制器原理图
2 可靠性应力分析预计法
可靠性预计是预估产品在预定工作条件中的可靠性设计值,一般在产品设计完成后、开展可靠性实验前对可靠性指标进行预计,可靠性预计根据组成单元的元器件、零部件来进行估计,随着设计和研制过程的逐步开展,获得的信息增加,可靠性预计也将更接近产品可靠性设计真值。
可靠性预计的作用和用途如下:经过可靠性预计,可以快速确定产品设计是否满足规定的可靠性指标要求,一般实际产品较难达到规定的可靠性指标要求;在产品设计过程中,可通过预计找出薄弱环节,通过采取设计措施,提高影响产品可靠性主要单元的可靠性水平,从而达到提高产品可靠性的目的;可用来设置产品出厂前可靠性试验目标值,也可为可靠性增长试验、可靠性鉴定等提供凭据;根据可靠性预计和产品工作状态的不同情况,预计维护保养频率、备品备件数量。
可靠性预计的方法有很多种,不同的产品、不同的研制阶段应使用不同的可靠性预计方法。目前工程上比较常用的可靠性预计方法有评分法、相似产品法、元器件计数法、元器件应力分析法、上下限法、应力-强度干涉法等。在开展可靠性预计工作时,相应的可靠性预计标准、手册是非常宝贵的借鉴工具,这些标准、手册大多数是根据不同元器件、部件进行大量试验得出的参考数据,常用的预计标准有HDBK-217F和GJB299C电子产品可靠性预计手册、RDF2000法国电信设备可靠性预计手册、HRD5英国电子元器件可靠性数据手册、SR-332贝尔电信设备可靠性预计手册,工程上常用的可靠性预计方法的应用条件和适用阶段如表1所示[4]。
表1 常用可靠性预计方法的应用条件和适用阶段
可靠预计方法预计参数应用条件适用阶段 相似产品法MTBF,λ,Rm(t)具有相似产品的可靠性数据论证、方案、工程设计 评分预计法MTBF,λ需要有经验的技术专家和专家参与可靠性设计工作论证、方案、工程设计 元器件计数法λ,Rm(t)已基本确定元器件种类、数量、质量等级和工作环境,能找到相关的数据研发阶段早期 应力分析法λ,Rm(t)已基本确定元器件种类、数量、质量等级等,能找到相关的数据手册,可提供经验公式和数据研发阶段中后期 应力-强度干涉模型R已基本确定材料型号、强度大小、应力大小等,能找到相关的数据手册,可提供经验公式和数据研发阶段中后期
由表1可知,应力分析法适用于电气原理图、电路及各元器件的环境应力都已明确,产品设计基本完成时。应力分析法时以元器件的基本失效率为基础,根据元器件工作环境、质量等级和工作环境应力,乘以相应的修正系数即可预计产品中元器件的工作失效率,进一步可以得出部件的失效率,最后得到产品的失效率或可靠度。
应用应力分析方法进行可靠性预计所需要的设计数据包括电子产品所选用的元器件种类、选用的元器件数量、选用元器件的质量等级、产品的工作环境、选用元器件的使用应力。一般国产元器件查阅GJB299C,进口元器件可查询MIL-HDBK217F或相应的元器件手册中失效率数据[5]。
根据应力分析法进行可靠性预计的计算过程较为烦琐,不同类型的元器件有着不同的故障率计算模型,如普通二极管的工作失效率的计算模型[6]为:
p=bπEπQπrπAπS2πC(1)
式(1)中:p为元器件工作失效率,10-6/h;b为元器件基本失效率,10-6/h;πE为电子产品工作的环境系数;πQ为元器件质量系数;πr为二极管额定电流系数;πA为应用系数;πS2为二极管电压应力系数;πC为二极管结构系数。
3 基于应力分析法的水下液压机械手控制器可靠性预计
应用电子元器件可靠性预计软件可方便快捷地进行电子设备的可靠性预计,下面结合实例介绍应用Relax 软件进行电子设备的应力分析预计。Relax可靠性预计软件中电阻的应力分析法软件设置如图2所示。
控制器中电子元器件种类较多,现以电容为例,简要介绍电子元器件应力分析法可靠性预计方法,由GJB299C可知,1类、2类瓷介质电容工作失效率预计模型为p=bπEπQπCVπch,固态钽电容工作失效预计模型为p=bπEπQπCVπSRπch,电容失效率预计如表2所示。
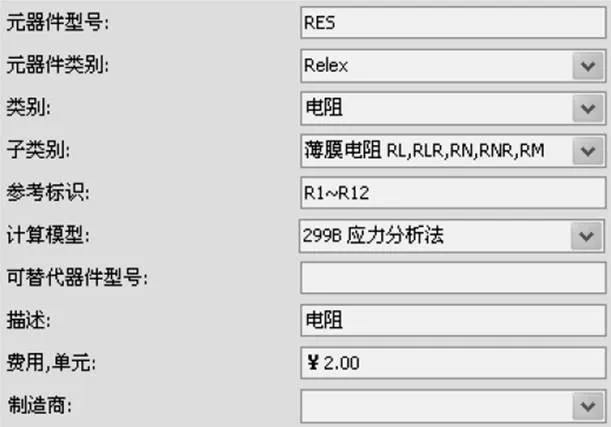
图2 Relax可靠性预计软件中电阻的应力分析法软件设置
表2 液压机械手控制器中电容失效率预计
元器件类别型号规格Sλbπchλb数量λp 2类瓷介电容C≤240 pF0.20.017 214.940.008 42 2类瓷介电容0.003 3 uF<C≤0.016 pF0.20.017 214.940.016 86 2类瓷介电容0.082 uF<C≤0.27 uF0.20.017 214.9320.215 76 2类瓷介电容0.27 uF<C≤0.75 uF0.20.017 214.980.064 06 固体钽电容15 uF<C≤47 uF0.20.005 814.960.033 26 合计 0.338 34
同样,由GJB299C相关数据可得到液压机械手控制器中半导体分立器件、光电耦合器、微电子元器件、继电器、电连接器、电源滤波器、晶振、电源转换器、印制电路板、焊点等相关电子元器件的失效率预计数据,具体预计数据如表3所示。
由于电子产品的寿命服从指数分布,()=-λt,因此可以计算出液压机械手任务剖面在15 min内,其工作任务可靠度为:

表3 水下液压机械手控制器中电子元器件失效率预计
序号元器件种类λp/(10-6/h)序号元器件种类λp/(10-6/h) 1电阻0.638 48电源滤波器2.08 2电容器0.338 349晶振1.925 3半导体分立器件0.721 4410电源转换器2.775 4光电耦合器0.729 94511印制电路板0.219 15 5微电子元器件1.007 6712焊点0.356 46 6继电器0.290 3合计12.243 52 7电连接器1.161 81
4 结论
本文以某型水下液压机械手控制器为例,应用可靠性应力分析方法,说明了水下液压机械手控制器可靠性预计方法的应用。经过该型水下航行器多次试验,其水下液压机械手控制器未发生一次故障,证明所介绍的可靠性预计方法有效,有力保障了水下作业的可靠性、安全性。
[1]刘兵.水下作业机械手液压系统及机械手控制技术研究[D].哈尔滨:哈尔滨工程大学,2015.
[2]付孟博.水下生产系统控制模块研究及可靠性分析[D].哈尔滨:哈尔滨工程大学,2017.
[3]廖道争,施保华.计算机控制技术[M].北京:机械工业出版社,2016.
[4]杨为民.可靠性·维修性·保障性总论[M].北京:国防工业出版社,1995.
[5]曾声奎.可靠性设计与分析[M].北京:国防工业出版社,2011.
[6]张增照,潘勇.电子产品可靠性预计[M].北京:科学出版社,2017.
U462.3+5;TH122
A
10.15913/j.cnki.kjycx.2020.09.018
2095-6835(2020)09-0049-03
宜昌市应用基础研究项目(编号:A19-302-19)
赵嘉媛(1986—),女,硕士,讲师,研究方向为机械设计、可靠性设计与分析。
〔编辑:严丽琴〕
