鼠笼型风力发电机有功功率输出控制策略①
2020-05-18贺笃贵
贺笃贵
(铜陵职业技术学院 电气工程系,安徽 铜陵 244061)
0 引 言
随着世界范围内的能源革命再一次掀起,分布式清洁能源替代或者补充传统化石能源的基本趋势已经形成。自然界内蕴含着巨量的风能,风力发电也逐渐被各国科研工作者所重视,也逐渐被世界各国电网慢慢接入接受[1]。考虑到短路容量大、间歇性强、集中式接入的大容量风力发电场会对电网带来一定的不利影响,风力发电机以一种分散、分布接入的方式就成了一种可行性方案。分布式风机单机容量较小,受制于制造成本的约束,鼠笼型发电机因结构简单、成本经济的原因,在分布式风机中得到了更加广泛的应用,目前主要接入配电网。若鼠笼风机以一种无序、无控的模式接入,仍然会给配电网的安全可靠性运行带来灾难性的影响,所以鼠笼风机控制策略研究也就具有十分重要的意义。
1 鼠笼型风力发电机模型
鼠笼风力发电并网系统由风轮机、鼠笼异步电机、软启动装置、无功补偿装置以及变压器等几个部分构成[2],其拓扑结构如图1所示。风轮机捕获风能,风能驱动风轮机转动从而转换成齿轮动能,从而驱动鼠笼异步电机发出电能。异步电机刚启动时由于内部电势较低所以启动电流会很大,对电网的冲击也比较大。为了降低风机启动对电网的冲击,一般鼠笼风机会采用软启动方式启动,通过软启动器从而降低对电网的影响。异步风机虽然结构简单,成本低,但是其功率因素都不会太高,通过无功补偿装置提高其并网时的功率因素。最后通过变压器将风机发出的电能变换成与电网相同的电压,从而实现鼠笼风机系统与电网系统的相互连接。
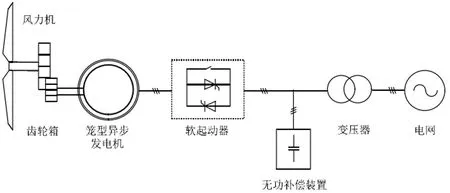
图1 鼠笼风机并网系统拓扑结构
PSCAD软件是一款能够进行微步长计算的时域仿真软件,其自带的模型库也是很强大的。异步鼠笼风机采用PSCAD自带的异步电动机元件,通过软开关并入电力系统。软开关的工作原理是当异步电机转速较低时,软开关呈现断开效应。当检测到异步电机转速达到一定值,其端电压也接近电网电压,此时软开关呈现连通效应,使异步电机电能输送给电网。电机采用转矩控制方式,速度控制方式下的设定速度为零,其模型如图2所示。
2 鼠笼风机控制策略
2.1 风机数学模型
风力发电机是由风能驱动齿轮从而带动鼠笼异步电机转动发电的一套装置,风能是其获得发电能力的原始能源。风力发电机输出的有功功率与风能的风速呈现相关性关系[3]。根据不同的风速,表征鼠笼风机有3个重要的参数,分别是切入风速vci、额定风速vN和切出风速vco。当风速低于切入风速时,鼠笼风机并不输出功率,此时其输出有功功率为零。当风速大于切入风速时,鼠笼风机开始输出功率,其输出有功功率值与风速的三次方成正比。但是风机输出的有功功率并不是无限增大的,当风速达到额定风速时,风机输出功率达到额定有功功率,也是其最大值。当风速过大时超过了切出风速,此时风机输出功率为零。鼠笼风机输出有功功率与风速关系如式(1)所示:
(1)
式中,PW为有功功率;PN为额定功率;Cp为风能转化率;ρ为空气密度;S为风轮转动面的面积。
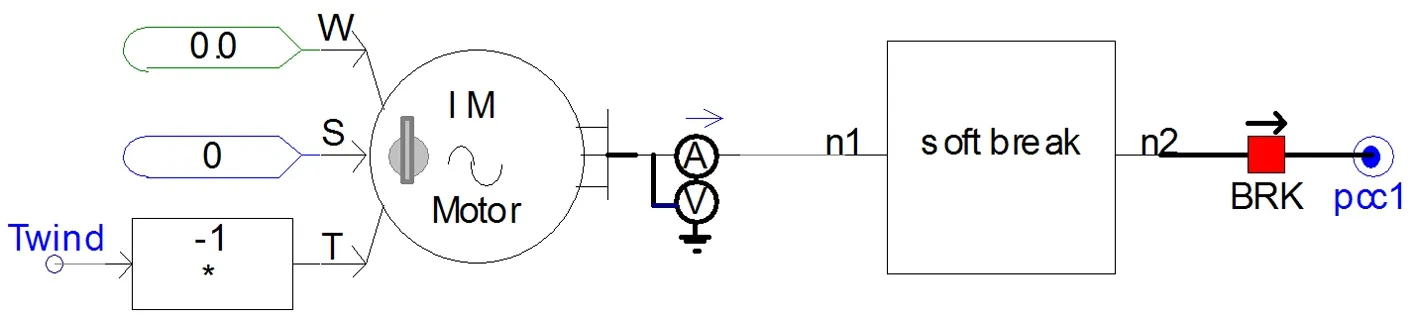
图2 风机的异步电机和并网软开关模型
2.2 鼠笼式异步发电机模型
异步电机种类很多,恒频恒速风电机组采用的是鼠笼式异步电机,数学模型介绍如下。
忽略鼠笼异步电机暂态过程,即让PΨds=PΨqs=0,定子电压方程为:
(2)
式中,Ud,Id,Ψq为定子绕组电压、电流、磁链;Uq,Iq,Ψq为定子绕组电压、电流、磁链;Rs为电阻,ωs为同步角速度。
磁链与暂态电势E′和电流的关系:
(3)
以暂态电势为状态变量,可推得:

(4)
式中,为定子的同步电抗,X=Xs+Xm。
该电势方程的相量形式为:
(5)
式中,s为滑差;f0为频率(50Hz),E′为暂态电势。
可以得到,定子绕组电磁方程式:
(6)
式中,X为同步电抗;X′为暂态电抗(p.u);T0′为时间常数。
转子运动方程可以反映作用于转子两者之间的转矩的关系。电机转子的之间的关系为:
(7)
式中,ΔM=MT-ME,为不平衡转矩。ω为转子机械角速度,J为转子转动惯量。由此可得下式:
(8)
式中,MT,ME分别为两种转矩(p.u),Tj为异步发电机惯性时间常数。
电磁转矩方程为:
ME=ψdIq-ψqId
(9)
式中,Id,ψd为电流与磁链。Iq,ψq为定子绕组q轴绕组磁链。
2.3 风机控制策略
在风电发展早期,异步风电机组占的比重比较大,虽然现在在主网中不再应用异步风机,但是在配电网中,仍然是目前使用最典型以及最广泛的风力机组控制模式如图3所示。
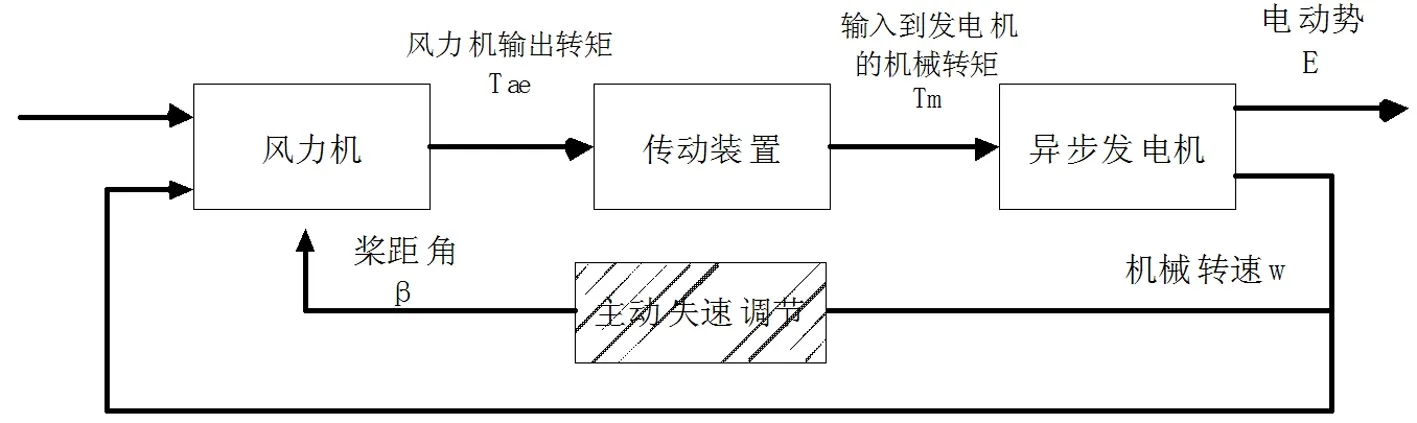
图3 鼠笼风机控制模式
采用PSCAD软件元件库里的风力机和控制模块模型,如图4所示。
鼠笼风机输出的功率来源于鼠笼异步电机,风轮机对鼠笼异步电机输出转矩。所以对鼠笼异步风机的控制主要是对风轮机的控制。主要从三个方面体现:风速控制,风轮机转速以及风轮机桨距角。风速选用模块式风速,有稳定风、阵风、波动风几种不同的风速来选择。转速主要来源于异步电动机转速的负反馈,从而实现对风轮机频率的控制。风轮机的桨距角直接影响风轮机输出到异步电机的转矩,由控制模块输出并由Beta端口输入,并加以控制逻辑。Tm为输出的机械转矩,P为输出的机械功率。风机控制模块会监测鼠笼型异步风机输出的有功功率情况来调节桨距角,以促使风机维持在额定功率输出状态,控制策略如图4所示。

图4 风力机及控制系统模型
3 实例仿真分析
以实际的IEEE13节点配电网算例为模型,鼠笼异步风机并网点为671节点。PSCAD软件是从时间0s开始进行仿真计算的,然而实际中的配电网是时时刻刻在运行的电网,鼠笼风机是不断启停并网离网的一个过程。对于未接入鼠笼风机的IEEE13节点配电网的仿真分析得出,该电网是在1.6秒后建立的稳定电压,所以鼠笼风机并网时间设置在1.6秒以后。选定风机容量为1.2MW,为了模拟实际风不稳定的特点,在鼠笼异步风机并网系统稳定后在稳定风的基础上加入波动风量,仿真鼠笼风机的有功功率输出特点。设定风速如图5所示。
鼠笼异步风机输出有功功率如图6所示。
在此控制策略下,异步风机在2s系统稳定时并网由于鼠笼风机转速低其端口电压未完全建立,此时功率是从电网流入异步风机。随着端口电压建立完成,风机慢慢向电网输出有功功率,而且风机功率因数值较高,其向电网输入的无功功率较小。随着较大波动风的作用,异步风机的输出功率随机变化,但是在异步电机向风轮机负反馈以及桨距角的控制策略下,其有功功率变动值较小,在电网可承受范围内。
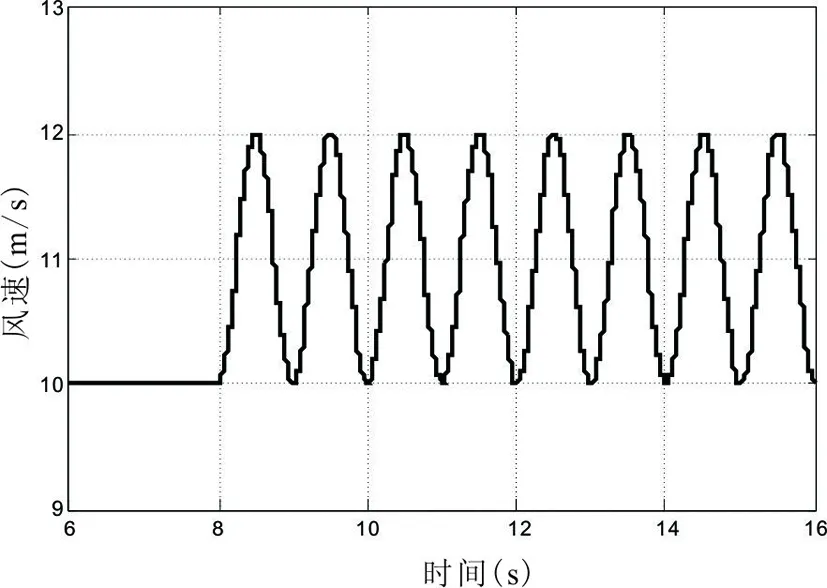
图5 风速曲线
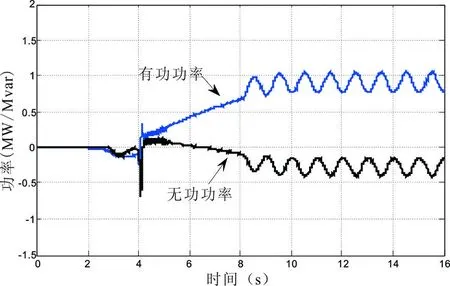
图6 鼠笼风机输出有功功率
4 结 论
基于PSCAD软件搭建了鼠笼异步风机的并网模型,建立了风速控制、异步电机转速负反馈以及风轮机桨距角追踪的有功功率输出控制策略。最后以实际的IEEE13节点配电网为仿真算例,研究该控制策略下的鼠笼风机并网以及风速波动时的有功功率输出状态。研究表明:随着较大波动风的作用,在异步电机向风轮机负反馈以及桨距角的控制策略下,其有功功率变动值较小,在电网可承受范围内。
