自适应换相与转矩补偿的开关磁阻电机转矩脉动抑制
2022-07-15孙庆国卫功民刘旭
孙庆国, 卫功民, 刘旭
(1.河北工业大学 河北省电磁场与电器可靠性重点实验室,天津 300130; 2.河北工业大学 省部共建电工装备可靠性与智能化国家重点实验室,天津 300130)
0 引 言
近些年来,开关磁阻电机(switch reluctance motor,SRM)作为一种新型电机,因其结构简单坚固,制造成本低,可控参数多、调速范围宽和易维护等突出优点[1-2],受到越来越多海内外学者和企业的关注,在新能源汽车、工业控制、风力发电、及航空航天等领域具有广阔的应用前景[3-4]。然而,由于其特殊的双凸极结构和磁阻非线性特点,开关磁阻电机具有转矩脉动高、噪声大、低转矩/功率密度以及控制器成本高等缺点,一定程度上限制其在工业领域的进一步应用和推广[5-9]。
作为促进SRM调速系统性能提高的关键技术,转矩脉动抑制策略已经成为了其研究领域的一大热点。在过去的几十年中,国内外专家围绕着开关磁阻电机的控制策略方面,对开关磁阻电机的转矩脉动抑制展开了大量研究和优化。国内外研究人员从实时转矩跟踪、换相加速、系统参数在线识别等方面着手,设计出多种SRM低转矩脉动运行的控制策略。文献[10]通过小电感区域的非线性数学模型,推导出开关角的解析式,并通过选择最优开关角,实现了转矩的平滑输出。文献[11]采用转矩分配函数(torque sharing function,TSF)控制,在转矩下降区域,完全断开开关管,使相转矩快速下降,同时根据此时前一相转矩的反馈,定义后一相转矩参考值,从而实现快速换相。文献[12]基于三电平功率变换器,提出了一种十二电压矢量控制策略,相比于传统的六电压矢量控制,转矩控制精度得到了提高。文献[13]提出了一种基于直接瞬时转矩控制(direct instantaneous torque control,DITC)的参数识别控制策略,通过电流斩波控制测量磁化曲线,并根据开通角与磁化曲线的关系,获取最优开通角。文献[14]提出分段谐波电流补偿的方法,向参考电流中注入多次分段谐波分量,以此调节转矩的输出,抑制转矩脉动。文献[15]为了充分发挥重叠两相的转矩能力,通过将换相区间进一步划分,分别执行转矩误差补偿控制,可以实现期望转矩的更好跟踪,但是这种控制方法会出现很大的拖尾电流,产生负转矩。
本文提出一种基于转矩在线补偿的自适应换相TSF控制技术。将换相区域以转矩电流比和转矩磁链比划分成两个区间,并针对前后两个区域实施转矩正负补偿。与现有的转矩脉动抑制方案相比,在换相区对转矩分配函数进行在线补偿的控制方案,可以很好地弥补由于母线电压限制而导致的转矩跟踪误差,实现换相区域的低转矩脉动运行。但由于其特殊的转矩补偿方式,会导致前一相的实际转矩在后半段区间内较大,从而出现拖尾电流,产生明显负转矩。因此本文基于转矩在线补偿进一步提出一种先进的自适应动态换相策略,通过对其相电流进行检测,并结合电机转速,从而在每个电周期中动态调整换相角,以最小化各相的负转矩。本文通过仿真与实验验证,证明所提控制策略的有效性和可行性。
1 SRM调速系统
SRM调速系统的基本结构如图1所示,该结构主要包括SRM、控制器、功率变换器、位置检测器和电流检测器五部分。其中,不对称半桥功率变换器是SRM调速系统最常用的功率变换电路,其工作状态可分为如图2所示的励磁状态、零电压续流状态以及退磁状态。

图1 开关磁阻电机驱动系统
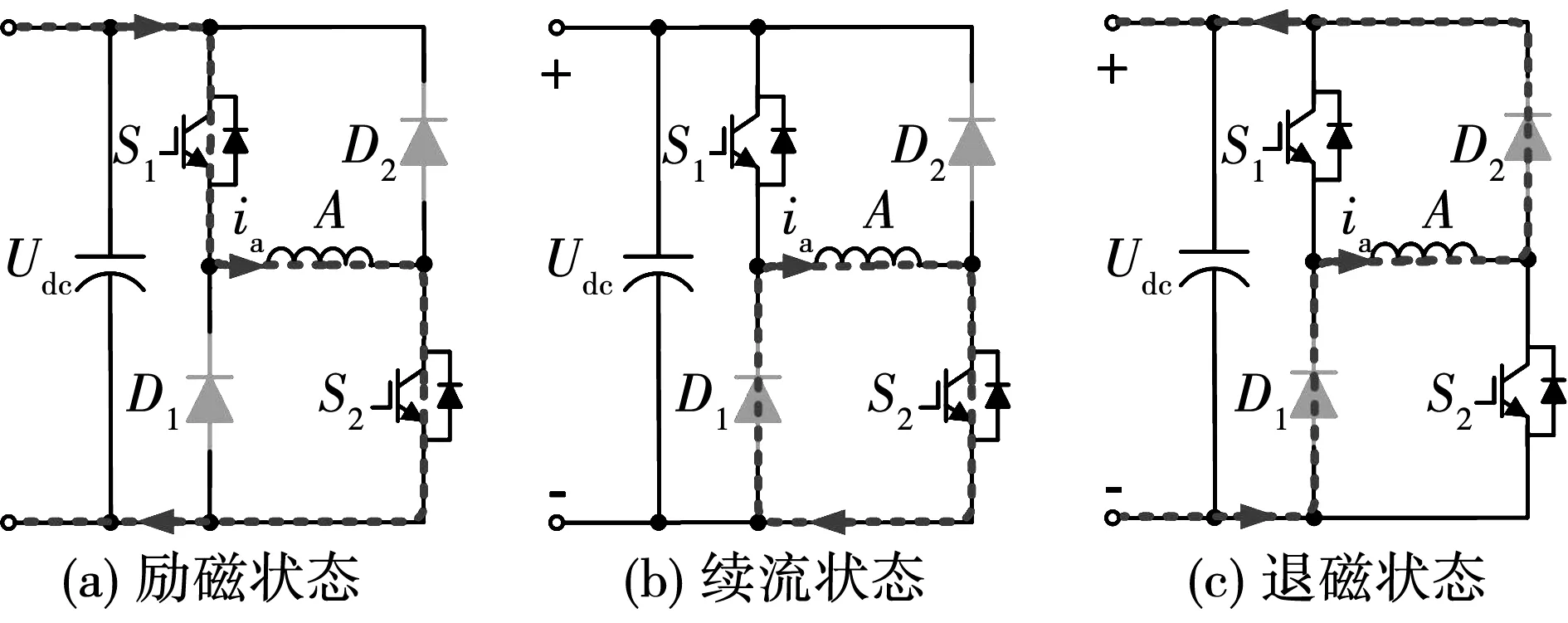
图2 三种运行状态
SRM运行时第k相绕组的电压平衡方程为
(1)
式中Vk,Rk,ik和ψk分别为相绕组的电压、电阻、电流和磁链。
开关磁阻电机的运行原理遵循“磁阻最小原则”,即磁通总要沿着磁阻最小的路径闭合。根据SRM的机电联系方程可以推导出电机相绕组所产生的转矩为
(2)
式中Wc,θ为磁共能与转子位置角。线性模型中SRM的电磁转矩可对上式简化,并表达成
(3)
式中Lk为相电感。
2 转矩补偿型TSF控制
2.1 传统转矩分配函数控制
SRM的转矩脉动主要来源于换相区域,在换相区后一相相转矩上升的值不足以抵消前一相相转矩降落的值,从而引起总合成转矩不等于期望转矩。因此转矩分配函数控制通过预先定义的函数,为各相分配参考转矩,并配合滞环控制使各相瞬时电流或转矩跟踪给定值,以此在换相区域抑制转矩脉动。其控制原理图如图3所示。
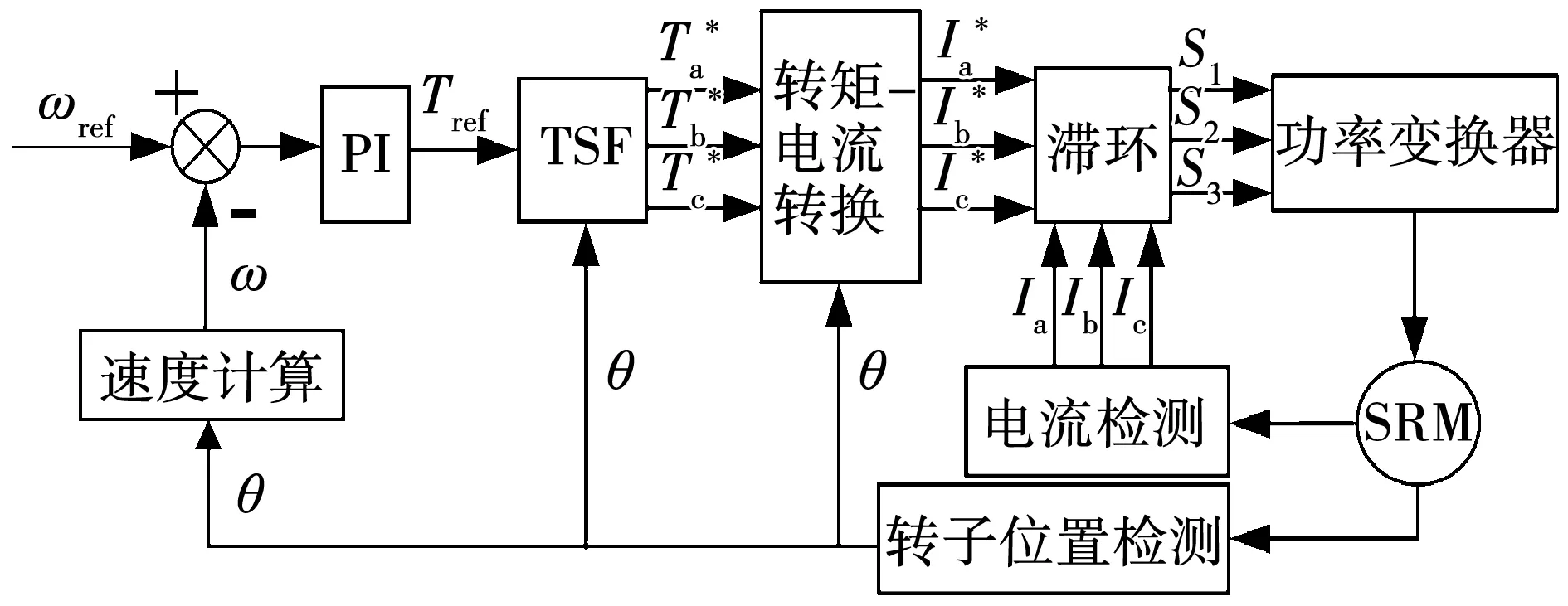
图3 TSF控制框图
图3中TSF模块的输入是总期望转矩Tref和转子位置角θ,可以通过提前定义的函数计算出各相的期望转矩。第k相的参考转矩为:
(4)
式中m为电机相数。常用的转矩分配函数的类型有直线型、余弦型、指数型和立方型。其中余弦型转矩分配函数的表达式为:
(5)
式中θon、θoff、θov分别为开通角、换相角、换相重叠角。
2.2 转矩补偿型TSF控制
本节提出了一种转矩补偿型转矩分配函数控制,可以有效抑制由于母线电压的限制所引起的换相区间转矩脉动。
为了实现TSF控制换相区的转矩在线补偿,本节依据换相区间前后相转矩的跟踪特性,对换相区域进行了划分,将换相区域分成了区间一和区间二。在低速时,两个区间的分离点设置为前后两相转矩电流比相等的时刻。图4为相同电流水平下,相邻两相的转矩分布图。在换相区间一,由于后一相TB刚开始导通,电流处于建立状态,电感斜率很小,而前一相TA此时提供转矩的能力较强,因此总转矩主要由前一相TA提供,A相的转矩电流比大于B相;在换相区间二,随着B相电感变化率的增大和电流建立的完成,B相的转矩电流比变大,而A相的转矩电流比逐渐减弱,总输出转矩主要由B相产生。
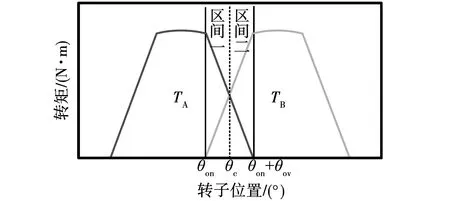
图4 转矩分布图
在转矩补偿型TSF控制中,当转子处于不同的位置区间时,选择转矩电流比较大的相进行转矩补偿,例如在区间一内,则通过对转矩电流比较强的A相进行转矩补偿,在最小化转矩脉动的同时,有利于提高电流的利用效率,加快相转矩响应速度,减小铜耗。
忽略绕组压降,将ψk=Lkik代入式(1)中,可得
(6)
式中ωr为转子角速度,对上式中ik进行求解可得
(7)
式中i(t0)为t0时刻的电流。对式(7)进行求导,即得
(8)
在采样时间很短的情况下,即Δt趋向于0时,式(8)可以转化为
(9)
因此可以得到
(10)
由式(10)可知,速度越高,相电流的变化率会越低,相转矩响应会变慢,此时若将转矩电流比相等的时刻,作为一、二区间的划分点,便会影响转矩补偿的效果。随着速度的升高,母线电压的限制成为了转矩跟踪精度差的主要原因,因此为了在相转矩对母线电压的需求较低处进行转矩补偿,由文献[16]可知,可以选择将相邻两相转矩磁链比相等的时刻作为一、二区间的划分点,在相邻两相相同的磁链值可以产生相等转矩处进行转矩补偿,从而确保在划分点处的电压需求可以得到满足。磁链数值是由积分法所获得,速度较低时,积分时间较长,会导致磁链的计算误差较大。所以低速时,将转矩电流比作为一、二区间的划分点更合适。
传统TSF控制的参考转矩曲线和转矩补偿型TSF控制的参考转矩曲线对比如图5所示,实线代表普通余弦型TSF控制的参考转矩,虚线代表修正后的相参考转矩,θ1和θ2代表一、二区间的划分点。

图5 转矩补偿型TSF曲线
区间一为换相区间的初始阶段,在此区间内后一相绕组所对应的转子刚开始由定转子不对齐位置向定转子对齐位置靠近,由式(3)可知,此时后一相电感变化率相对较低,转矩的产生能力不足,无法精确跟踪其参考转矩,因此会导致总转矩偏小,所以在区间一中,对后一相的参考转矩不做处理,而用总参考转矩减去后一相的实际转矩,并将得到的数值作为前一相的期望转矩,从而弥补后一相的转矩产生不足,即有:
(11)
(12)
式中Tk,Tref_k和Tref分别为第k相的实际转矩、第k相的期望转矩和总期望转矩。
在区间二内,即换相区的后半段,由于前一相转子处于向定转子对齐位置接近的末尾阶段,此时相电感的变化率较大,因此前一相转矩无法及时降落到所设定的参考转矩,会造成总合成转矩偏大,引起转矩脉动,此时采用与区间一相反的做法,即对前一相的参考转矩不做处理,而用总参考转矩减去前一相的实际转矩,将所得数值作为后一相的期望转矩,从而消除因输出相转矩过大而导致的转矩脉动,即有:
(13)
(14)
式中Tk-1为第k-1相的实际转矩。
经过上述分析,可以得到一种转矩补偿型TSF如下:
(15)
通过本节所提出的转矩补偿型TSF控制,转矩分配函数控制在换相区域的转矩脉动问题,会得到很大程度的抑制。但是在区间二中,前一相实际转矩无法及时降落到参考转矩,会导致前一相产生拖尾电流,产生负转矩。而在区间一内,是通过抬高前一相的参考转矩值,从而弥补后一相的转矩跟踪不足,虽然此误差经过对后一相的转矩补偿得以消除,但是具有更高参考转矩的前一相会因此产生更大的负转矩,并产生转矩脉动。如图6所示,为前一相参考转矩和实际转矩的对比示意图,实线为参考转矩,虚线为实际转矩,区间二内的转矩不能及时降落,导致拖尾相电流产生,从而引起了较大的负转矩。

图6 参考转矩与实际转矩对比
3 自适应换相TSF控制
针对转矩补偿型TSF控制所导致的前一相负转矩过大的问题,本节提出了一种在线调整TSF换相角的控制策略,以此减小负转矩的产生。
传统TSF控制的换相角θoff在运行过程中是提前离线设置并固定的,不能通过转速或电流反馈的误差信号进行在线实时调整,较小的换相角会导致过大的换相区域,引起转矩波动。过大的换相角则会导致拖尾电流,产生负转矩。如图7所示,为不同的换相角对转矩分配函数曲线的影响,换相角靠前的转矩分配函数在相同转子位置下具有较低的幅值,但换相区较大;而延后的换相角则具有较高的幅值,但缩小了换相区。为了选取合适的换相角,进而抑制转矩补偿型TSF控制中由拖尾电流产生的负转矩,同时尽量避免不必要的大换相区,本节对电机相绕组电流的末端进行检测,从而在每个电周期中,实时更新各相的换相角θoff。

图7 不同换相角的下降区转矩分配函数
根据SRM的相电感特性,相电感在定转子位置对齐处较为平坦,即相电感的变化率相对较小,如图8所示。其中θb1和θb2代表最大电感区域的两个边界点,θe为定转子对齐位置处,为了方便对相电流进行检测控制,设定θe1和θe2是相电流末端端点区域的前后两个边界点。

图8 相电流端点检测和相电感特性
利用传统的TSF控制方法对12/8极的SRM进行控制,换相角通常设置为15°,理想条件下,当转子位置到达22.5°时,相转矩应为零,不能产生拖尾电流,但由于转矩跟踪精确度不足,在转子位置到达22.5°时,仍然会存在较大的拖尾电流,产生负转矩。
若将TSF控制的换相角设置相对较小,使转矩分配函数的下降区域提前,从而使电流末端的两个边界点θe1和θe2都落在转子对齐位置θe之前,则不会有负转矩的产生。然而,如果采用过小的换相角,导致相电流在转子位置22.5°之前降为零,会导致电机正转矩产生区域的不充分利用,同时会引起后一相绕组过早开通,引起很大的尖峰电流,降低电机的输出效率的同时会增大换相区,也会导致转矩脉动的增大。另一方面,过大的换相角会使相电流不能及时降落到零,使拖尾电流进入相电感的负斜率区域,产生电磁负转矩,在换相区域带来较高的转矩脉动,影响电机的输出特性。
由式(3)可知,电感斜率和电机转矩产生能力成正比,所以在电感斜率较小的定转子对齐位置处,电磁转矩产生能力较弱,相应的拖尾电流引起的负转矩也很小。因此,若使两个电流末端边界点设置在相电感变化率较小的区域时,其产生的负转矩就可以忽略不计。为了避免产生严重的负转矩,同时兼顾换相区域最小化,以及更好地利用正转矩的产生能力。本文对相电流末端边界点设置的基本原则是将边界点设置在定转子对齐位置附近,即边界点θe1可以设置在定转子刚开始对齐位置前,而边界点θe2可以设置在等于或略大于定转子对齐位置处。
图9给出了相电流末端端点处的检测控制流程图。首先,对SRM设置初始换相角θoff0,以及两个电流末端边界点θe1和θe2。其次,为了确保相电流在规定的末端端点区域内降到零,需要将换相角的调整与否与电流值ioff、ie1和ie2相结合,其中ioff、ie1和ie2会分别在每个电周期中的θoff、θe1和θe2进行采样。

图9 自适应换相控制流程
如果采样电流ie1检测为零,则意味着在进入当前端点区域时,相电流已提前降至为零。为了充分利用电机正转矩的产生能力,此时需要将初始换相角推迟,为其提供换相延迟角Δθoffd。同时根据SRM的工作原理,通过充分考虑电机转速ω和相绕组励磁电流ioff的大小,退磁速度与电机转速和绕组电流应该是负相关的。即为了防止电机退磁过慢,当电机以较大的绕组电流在高速运行时,应采用较小的换相延迟角。因此,定义了反比例函数来计算换相延迟角
(16)
式中Δθoffd,ω,n,poffd分别为换相延迟角、角速度、电周期数和比例系数。本方案中采用比例系数是为了加快响应速度,简化控制逻辑。
如果检测所得到的ie1大于零,则需要在θe2处对ie2进行采样,通过判断ie2的大小,来确定是否需要调整换相角。当ie2也大于零时,则意味着出现了拖尾电流,即相电流没有及时下降到零,会延伸到负电感斜率区域,导致负转矩的产生。为了降低负转矩大小,在下一个电周期中,需要为换相角附加一个换相提前角Δθoffa,将换相角提前,从而使电流在θe2处可以降为零。为了加速退磁过程,电机在高速运转时,应采用较大的换相提前角。因此,定义了负系数的比例函数的来计算换相提前角:
(17)
式中Δθoffa和poffa分别为换相提前角和比例系数。
因此,由以上分析可以得到修正后的换相角θoff的表达式为
(18)
修正后的换相角将会在下一个电周期中得到更新,如果ie1大于零,ie2等于零,则表示在指定的相电流末端端点区域内,相绕组在最小化换相区域及充分利用正转矩产生能力的情况下,也避免了负转矩的产生,满足本文对转矩脉动抑制的要求,在这种运行条件下则不需要对换相角进行修正,换相角则会保持此刻的数值,直到在这种电流末端端点设置的条件下,再次产生了负转矩或正转矩产生区域的不完全利用。
根据SRM的相电感特性,在定转子对齐位置附近,转矩产生能力较低。本文采用的是三相12/8极SRM,定转子对齐位置为22.5°。因此,本文将电机的最大电感区域边界点θb1和θb2分别设置为21°和24°,而在22°到23°的区域接近定转子对齐位置,此区域相电感的变化率较小,不会引起明显的负转矩。因此兼顾电机正转矩产生能力和转矩脉动最小化,本文将相电流末端端点θe1和θe2设置为22°和23°。
随着换相角改变,转矩分配函数也需要随之改变,因此需要获得更新后的各相参数。在自适应换相TSF控制中,为了抑制负转矩,可以通过提前开通的方式,提前建立电流,从而使后一相在区间一内能更好的跟踪参考转矩,以此降低前一相在区间一内所抬高的参考转矩幅值;同时为了在换相区域,避免前一相的转矩下降值得不到及时补偿,所以在前一相换相时,后一相需要立刻开通,因此可得到
(19)

由式(5)知,转矩分配函数的主要参数有θon、θoff和θov,其中θoff可以由自适应变换相角策略获得,θon则可以通过式(19)确定,θov则有以下关系式:
θend-θoff=θov。
(20)
式中的θend为相电流等于零的转子位置角。
本文的θend处于电流末端边界点θe1和θe2之间,无法实时检测其确切数值,因此本文假定θend为θe1和θe2的中点,如式(21)所示,并代入式(20)获得θov,从而获得新的转矩分配函数参数。
(21)
然而,真实的θend并不是θe1和θe2的中点,而是随着θoff实时变化的,因此这种θend的选取方式会使转矩分配函数在换相区间的构造不精确,引起转矩脉动。但通过前一节所提出的转矩在线补偿型TSF控制,即便某相的函数构造出现误差,通过转矩补偿策略,也可以将函数构造误差和相转矩的跟踪误差一起得到消除。同时,转矩补偿型TSF控制产生的负转矩也可以通过自适应换相角策略得到大幅度抑制。
4 系统仿真
为了验证本文所提的转矩补偿型自适应换相TSF控制的有效性,本节以一台三相12/8极SRM作为控制对象,在MATLAB平台进行仿真验证。在仿真模型中,通过有限元方法获得转矩数据,并采用二维查表的方式获得实时瞬时转矩,转矩滞环宽度设置为±0.05 N·m,电流滞环宽度设置为±0.15 A。
仿真中电流斩波控制的开通角设置为0°,关断角设置为20°。传统TSF控制的开通角设置为0°,换相角设置为15°。而自适应换相控制中,为了避免换相区过大,将换相角最小值固定在13°。为了定量分析开关磁阻电机的转矩脉动,本文定义了转矩脉动率KT来描述转矩脉动的大小,即
(22)
式中Tmax,Tmin和Tav分别为最大转矩值、最小转矩值和平均转矩值。
图10和图11所示分别为电机转速300和500 r/min,负载转矩为1 N·m时,传统电流斩波控制、传统TSF控制和改进型TSF控制的仿真结果。
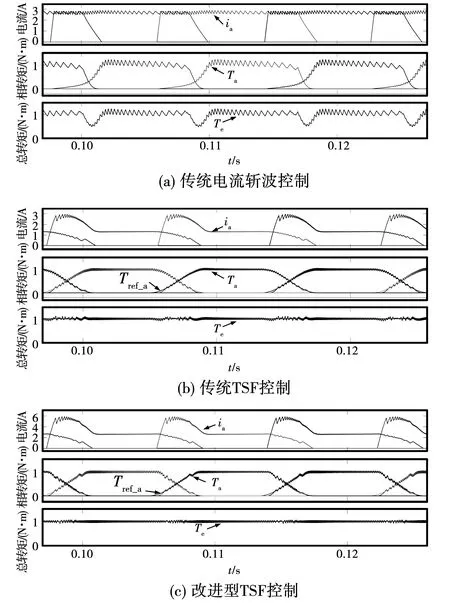
图10 仿真波形图(300 r/min)

图11 仿真波形图(500 r/min)
电流斩波控制在滞环宽度内直接对相电流进行控制,因此在单相导通区间转矩脉动较低。在换相区间,SRM的相转矩与相电流平方和电感变化率有关,即便后一相开始导通时相电流迅速上升至峰值,但由于后一相转矩产生能力不足,同时前一相输出转矩快速下降,仍会使合成总转矩出现向下的转矩脉动,随着速度增加,向下的转矩脉动会更加明显。
对于传统TSF控制,在单相导通区间,相转矩采用滞环控制可以很好地跟踪参考转矩,而在换相区域,由于相邻两相参考转矩是通过预先设计的转矩分配函数产生,所以与电流斩波控制相比,传统TSF控制在换相区域的转矩脉动大幅度降低。在传统TSF控制中后一相刚开通时,电流同样快速增加到峰值,但在区间一内,后一相电感变化率较小,仍跟踪不上给定转矩,合成总转矩低于期望转矩。在区间二内,此时转速较低,前一相可以较好地跟踪给定转矩,转矩跟踪误差不大。然而随着速度增加,后一相的转矩产生能力不足和前一相产生的过大转矩会更明显,传统TSF控制在换相区域的转矩脉动也会增加。
在改进型TSF控制中,由于在换相区间一内,后一相转矩产生能力不足,可以通过转矩补偿策略,使转矩产生能力较强的前一相的参考转矩提高,进而抬高前一相的实际转矩,以此抵消后一相产生转矩的不足。在区间二内,此时转速较低,使前一相有充足的时间降落至参考转矩,因此前一相的实际转矩可以较好地跟踪参考转矩,后一相参考转矩只需小幅度调整,即可平衡总转矩。计算可得300 r/min时,改进型TSF控制转矩脉动相比于传统电流斩波控制和传统TSF控制分别减少了50%和10%,而500 r/min时,转矩脉动则分别减少了39%和15%。
当电机转速为1 200 r/min,负载转矩为1 N·m时,由于电流斩波控制在高速时效果较差,所以高速时只对传统TSF控制和改进型TSF控制进行了比较,仿真结果如图12所示。

图12 仿真波形图(1 200 r/min)
随着转速增加,如图12(a)所示,传统TSF控制转矩脉动显著增大,在区间一内后一相的实际转矩明显跟踪不上参考转矩,因此总转矩会出现向下转矩脉动,而在区间二内,前一相实际转矩下降时间不足,始终高于参考转矩,因此会引起向上转矩脉动。
对于改进型TSF控制,如图12(b)所示,在区间一内将前一相的参考转矩抬升,弥补后一相在区间一的转矩跟踪误差。在区间二内,前一相转矩始终较大,所以可以修正后一相的参考转矩,使后一相的实际转矩处于较低水平。自适应换相策略使换相角提前,通过提前进入转矩分配函数的下降区,抑制了转矩补偿型TSF控制所产生的负转矩。改进后的TSF控制转矩脉动相比于传统TSF控制降低了35%。
5 实验验证
以一台12/8极SRM作为控制对象,并基于dSPACE平台进行了实验验证。为了提高本方案中的滞环响应速度,本实验采用比较器作为滞环硬件,代替传统的软件滞环控制。
图13(a)、(c)、(e)、(g)为传统TSF控制,图13(b)、(d)、(f)、(h)为改进型TSF控制,分别在电机300、500、700和1 200 r/min,负载为1 N·m时的控制效果。

图13 实验波形图
在换相初期,即本文定义的换相区间一,由于后一相转矩产生能力不足,即便电流一直保持增长,后一相的转矩也始终低于参考转矩,总转矩此时出现向下的转矩脉动;而随着转矩产生能力的增强,电流逐渐从最高点降落,从而使转矩维持在一定幅值。在换相初期,随着参考转矩的下降,前一相电流也随之降落,转矩随着给定转矩的降落而减小。但在换相区间的后半段,即本文定义的换相区间二,此时由于前一相电感变化率较大,电流的降落速度无法满足转矩的跟踪要求,转矩无法减小到给定转矩,因此会出现一个较大的向上转矩脉动。
改进型TSF控制后一相在换相初期转矩的跟踪能力较差,此时将前一相的参考转矩抬高,利用其良好的转矩产生能力弥补后一相转矩此时的跟踪不足。在换相区间后半段,由于前一相转矩产生能力较强,无法降低至参考转矩,此时对后一相的参考转矩进行负补偿,使其实际转矩降低,抵消前一相带来的转矩波动。改进型TSF控制在区间二中使后一相的参考转矩得到了负补偿,因此其实际电流得到了降低,从而削弱了在进入单相导通区时电流不能及时降低,导致转矩脉动的情况。换相角经过在线寻优,在拖尾电流不能满足本文要求时也会进行择优选择,当负转矩较大时,会将换相角提前。改进型TSF控制的转矩脉动相比于传统TSF控制分别降低了10%、20%、25%和30%。
图14为改进型TSF控制的动态特性,速度从800 r/min减速至400 r/min再加速至1 000 r/min,负载为0.5 N·m。当电机为800 r/min时,存在拖尾电流,因此换相角提前,后一相的开通角随之提前;当电机减速至400 r/min时,拖尾电流相对较小,所以此时将换相角略微滞后,电流峰值随之减小,且转矩脉动会降低;当电机加速至1 000 r/min时,随着转速的增加,电流无法快速降到零,因此换相角需要大幅度提前,同时转矩脉动也会有所提高。
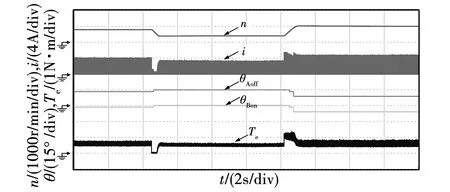
图14 改进型TSF控制的转速动态特性
6 结 论
本文针对开关磁阻电机转矩脉动问题提出一种转矩补偿型的自适应换相TSF控制,使开关磁阻电机换相区域转矩脉动得以抑制。在换相区域通过转矩补偿的方法,抑制了SRM的转矩脉动,并针对该方法产生的负转矩,进行末端相电流检测,寻优最优换相角,使TSF控制的换相角实时更新。该方法与传统TSF控制相比,换相角设置灵活,对转矩波动的抑制效果更明显。本文以一台三相12/8极SRM为控制对象,进行了仿真与实验验证,证明本文所提方法的有效性和可行性。
