结合LBP和SVM的视频表情识别方法
2020-05-13姚丽莎徐国明何世雄
姚丽莎,徐国明,房 波,何世雄,周 欢
(安徽新华学院 信息系统软件研究所,安徽 合肥 230088)
人的脸部是非常值得关注的外部特征。人与人交流不需要接触对方就可以识别对象的一些心里活动,丰富多样的表情能够在很多情况下代替语言表达自己的内心情感。人与人不但可以通过表情来表达情绪,还能分辨出交流者的心理和态度。据Mehrabian的论述,人们在交流的时候肢体语言的方式占据最大比例[1]。视频表情实时识别是一个很有应用价值的研究课题。
人面部表情的复杂性与细腻性使计算复杂度增加,计算量大的算法无法应用到实时视频处理中,所以选用何种算法提取何种特征以增强时效性成为研究难点。针对这一问题,国内外学者进行了研究。如基于Gabor小波变换[2]和LBP(Local Binary Pattern)[3]特征的表情识别方法,这些算法结构简单易实现,但识别率有待提高。文献[4]提出结合时域信息的Gabor运动能量滤波器结合SVM实现表情分类,其效果优于Gabor滤波。针对人脸表情集中于眼睛、眉毛、嘴巴等区域的特点,学者提出了多种区域特征级联表情识别方法。将不同区域的细节特征按照一定的规则形成一个特征向量,并将数据降维后输入分类器进行识别,如文献[5]将Gabor变换后的数据利用径向网络联合编码进行分类;文献[6]通过LBP统计表情局部纹理特征并利用信息熵决策各区域的级联加权值。上述多种区域特征级联表情识别方法充分描述了人脸的表情特征,但是表示数据维度较高会影响识别的实时性。
近年来,级联形状回归模型在特征点检索方向上有了突破性进展,此回归模型从历史经验中获得关于人脸表观至人脸形状的映射方法,建立从表象至形态的映射方法[7]。这类方式不用复杂的人脸形状及其表观建模,效率高,实现也方便,效果好。另外,深度学习方向的人脸特征点定位算法也有很好的效果。深度学习与形状回归框架相结合可更好地提升定位模型的准确性,是目前特征定位的主要方式之一。
迄今为止,虽然人脸表情自动识别技术在各种应用推动下发展很快,但鲁棒的自动人脸表情识别系统仍尚未建立。根据国内外学者对表情识别的研究,以上几种算法都有其各自的局限性,同时由于信息量过大,使得识别及分类算法的效率受到严重影响。如何提高算法的效率成为了分类识别算法重要的研究方面。
本文通过LBP算子检测人脸,利用多级级联回归树模型对人脸68个关键点进行训练,提取脸部表情的几何特征,并依据此特征结合SVM来判别人脸表情,进而完成7种表情的分类。
1 特征提取算法
表情识别一般讲的是从机器通过人脸的照片判别人物当时的情绪。从结构上理解表情即眉毛、鼻子、嘴巴和脸的不同组合,最简单的方式便是对这些几何位置进行分类来判别表情。本文提出采用LBP(局部二值模式)特征结合SVM(支持向量机)进行决策表情分类的方法,基本流程如图1所示。
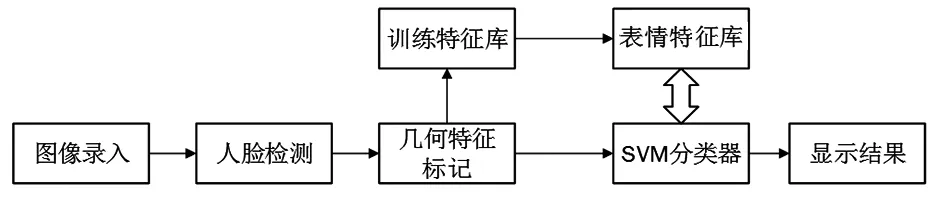
图1 识别过程Fig.1 Recognition process
人脸表情基本识别思路如下:
1)在图中找到人脸,这是最基本的要求。否则就无法获得五官的信息以提取表情特征;
2)找到人的面部以后,分析其几何与纹理特征来表示不同的表情;
3)选取分类方法来判别这些特征。
脸部情绪特征的提取一般有下面的方式:整体模版匹配和基于几何纹理特征的匹配。整体模板匹配中,模板一般用像素点或是向量。在几何特征的匹配中,在图中探测到主要的特征点,经由特征点的距离与主要部分相对尺寸得到特征向量。基于特征的方式比基于模板的方式计算量大,但对面部位置、尺度、头部方向、大小都不敏感。
1.1 人脸检测
局部二值模式(Local Binary Pattern,LBP)特征不会因为旋转或者光照变化而发生明显变化,并且LBP特征的算法比较容易计算,处理视频人脸表情识别能够更有效,实时性更好。局部是指图像上某个像素点的纹理特质,很多情况下是指这个点和周围像素点的关系;二值模式指用中心像素的二值化作为阈值。
最简单的LBP模式,将一幅图像以像素为单位分成若干3×3的区域。把周围8个像素的值与中心像素进行比对,若是不小于中心像素的值则被设置为1,不然的话为0。这样,3×3范围内的8个像素点经过与中心像素比较可产生8位二进制数00010011(将该二进制转换为十进制数即LBP码,共256种),即得到该窗口中心像素点的LBP值,这个值即可反映该区域的纹理信息。计算过程如图2所示。
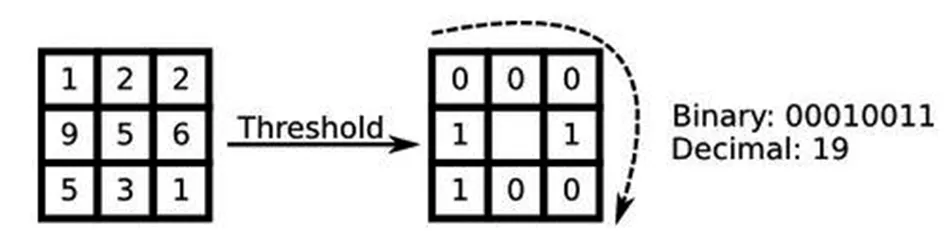
图2 LBP算子计算过程Fig.2 Calculation process of LBP operator
LBP算子值因光照而产生的变化很小,因为在不同光照下,不改变周围像素与中心像素的关系,即一定程度下均匀变化的光不影响LBP算子值。因此在一定程度上,该算法可以解决因光照带来的影响。同时LBP算法计算简单也有助于本文实时分析图像。如图3所示,不同光照下的LBP特征变化很小,可以解决一些因光照带来的影响。
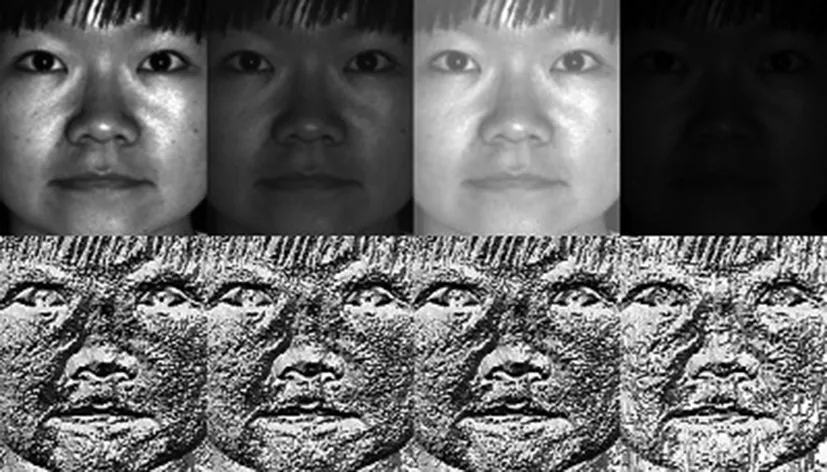
图3 不同光照下的LBP特征Fig.3 LBP characteristics under different light
计算一整幅包含背景的人脸图像的LBP特征和人脸LBP特征进行比对是无法定位人脸的。LBP特征即可反应某处的纹理信息,进行人脸检测的思想是根据比较人脸图像与目标图像的LBP特征的相似性来确定该图像是否是人脸,但是该过程只是进行了人脸识别,也就是判断一幅图像是不是人脸,而非一副图像是否包含人脸,如何在一整幅图象中找到人脸才是关键。既然已经可以识别人脸,那么在输入图像中截取一部分分别进行LBP特征的提取与判定,可以判定图像中截取的位置是否为人脸,这样一直循环遍历整幅图像,便可以定位到人脸的位置。
本文采用设定的窗口在图像上滑动多尺度扫描整个图像,图4为人脸检测过程,通过分类器去判别是否是人脸。首先检测窗口与将要进行检测的对象进行对齐,然后移动窗口进行下一次比较,直到这副图像被窗口遍历,最后进行缩放原始进行多尺度检测,图5为多级级联分类进行定位人脸的过程。通过计算窗口覆盖下的图像特征,与目标特征进行匹配来确定这部分图像的内容。
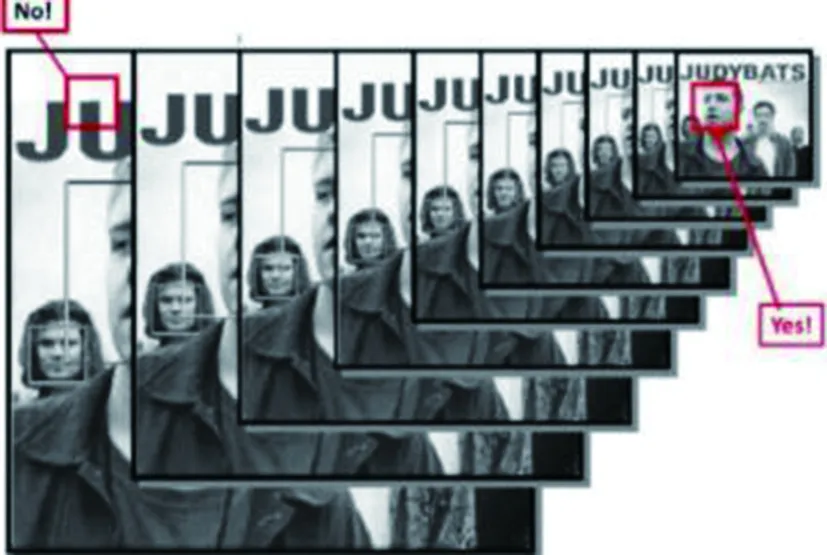
图4 人脸检测过程Fig.4 Detection process of face
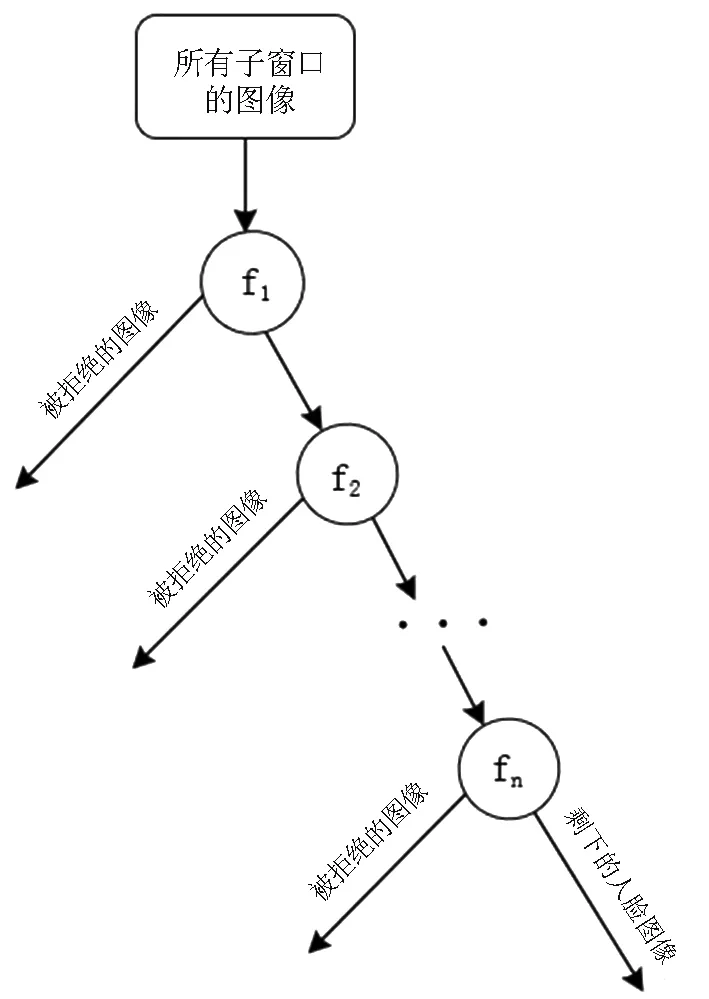
图5 级联分类定位人脸过程Fig.5 The process of face positioning by cascade classification
其中,计算两张图片LBP特征向量的相似度实现人脸识别,相似度公式为
(1)
该式即是卡方检验,可以检测类别的相关性。式中H1、H2分别为两幅图像的LBP直方图(Histogram)。d越小,表示差异越低,两幅图像越接近,越相似;相同则d为0。
1.2 训练关键点模型
人脸关键点检测(Facial Landmark Detection)是根据输入的人脸图像,自动定位出面部关键特征点,如眼睛、鼻尖、嘴角、眉毛以及人脸各部件轮廓点等[8]。根据这些特征点的关系来判断目前的情绪状态[9]。
因为有光照、姿态、遮挡等问题的负效应,人脸关键点检测不容易实现。本文首先用LBP特征定位人脸,并进行人脸目标跟踪[10],然后进行人脸68个关键点检测。本文利用几何特征进行表情检测[11],使用基于Ensemble of Regression Tress(ERT)算法级联回归,即基于梯度提高学习的回归树方法[12]。该方式检测速度快,效果也不错。同时对于不完整的人脸依旧能够进行检测。
当获得一张图片后,算法会产生一个初始形状(initial shape)即先预估一个大致的特征点位置,然后采用Gradient Boosting方式减小初始形状和标注位置(ground truth,真实特征点位置)的偏差平方和(损失函数)。用最小二乘法使偏差最小化,获取每一级的级联回归因子。式(2)描述了偏差平方和,式中yi为预测值,ti为标注值。
(2)
Gradient Boosting算法是在迭代时选择梯度下降的方向来保障结果最好。损失函数用来表示模型的“靠谱”水平,如果模型未过拟合,损失函数变大,模型的错误率增高,如果让算法能够使损失函数一直降低,即表明算法模型在不断地改进,而最佳的方法是损失函数在其梯度方向上下降即Gradient Boosting算法的思想。
面部特征点定位的思想可以理解为学习一个回归函数F,输入图像I,输出为θ,即特征点的位置,则θ=F(I)。通俗来讲,级联回归模型能够统一为学习多个回归函数{f1,f2,…,fn}:
θ=F(I)=fn(fn-1(…f(θ0,I),I))
(3)
θi=fi(θi-1,I),i=1,…,n
(4)
级联是指当前函数fi的输入依赖于上一级函数fi-1的输出,而每一个fi的学习目标都是逼近特征点的真实位置θ,θ0为初始形状。回归当前形状θi-1与标注位置θi之间的差:Δθi=θi-θi-1。核心公式为
(5)

图6为算法的回归过程,ERT是在学习Tree的过程中,直接将形状(shape)的更新值ΔS存入叶子结点(leaf node),初始位置ΔS在通过所有学习到的Tree后,平均形状(mean shape)加上所有经过的叶子结点的ΔS,即可得到最终的人脸关键点位置,图7为算法检测到的关键点。

(a)t=0 (b)t=1 (c)t=2 (d)t=3 (e)t=10 (f)Ground truth图6 算法的回归过程Fig.6 Regression process of the algorithm
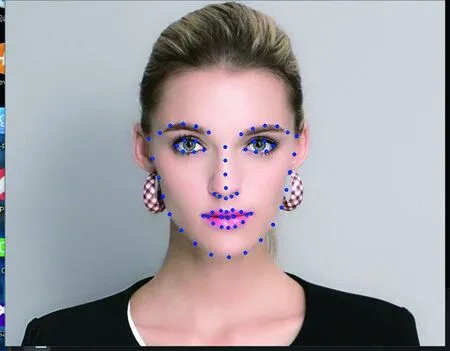
图7 关键点标记Fig.7 Key marks
2 表情分类与识别
人脸表情识别在识别表情之前需要检测到人的面部,然后通过分析人面部五官等特点判别此时目标对象所表达的情绪。这需要建立一个判别依据,即分类器。采集一些正样本(各种表情的图像)建立表情库,然后训练分类器,给每一种表情状态贴上标签,这是分类器的训练。表情识别过程输入一幅图像,分类器来识别判断这副图像的类别。
支持向量机(support vector machine,SVM)是二类分类模型方法,支持向量机模型是定义在特征空间上的间隔最大的线性分类器,SVM的学习策略是间隔最大化[13]。SVM最大分类间隔可以简单理解为存在两类二维数据,若是把数据画在二维坐标平面上,可以很简单用一条线把两类数据分开。理论上这条线可以有无数种,但是,总有一条能够满足靠近这条线的点(正负样本)与这条线的距离最大时便是最好的选择,即是SVM算法所求的决策边界。
一般来讲普通的SVM就是用来完美划分两类数据的一条线,如图8所示。这是最完美的一条直线,该条线处于两类数据的中部且距两类数据一样的距离。而这些离分界线最近的点就是支持向量(Support vector),若是分类高维的点,SVM的分界就是平面或者超平面。支持向量机中最核心的是支持向量,在样本集中定位到某些特定的点作为支持向量,就可以依据这些支持向量计算出分类超平面,然后再依据超平面对类别进行归类划分。SVM是一种有监督式的机器学习分类算法,所以对于给定的训练样本,要确定每个样本的归类是1还是0,即每种样本都需要标注一个确切的类别标签,用来SVM训练。对于样本的特征及其维度,SVM并没有限定,本文采用特征点的几何特征作为训练对象,提取人脸五官68点特征进行分析与记录,并使用SVM分类器进行训练分类识别。
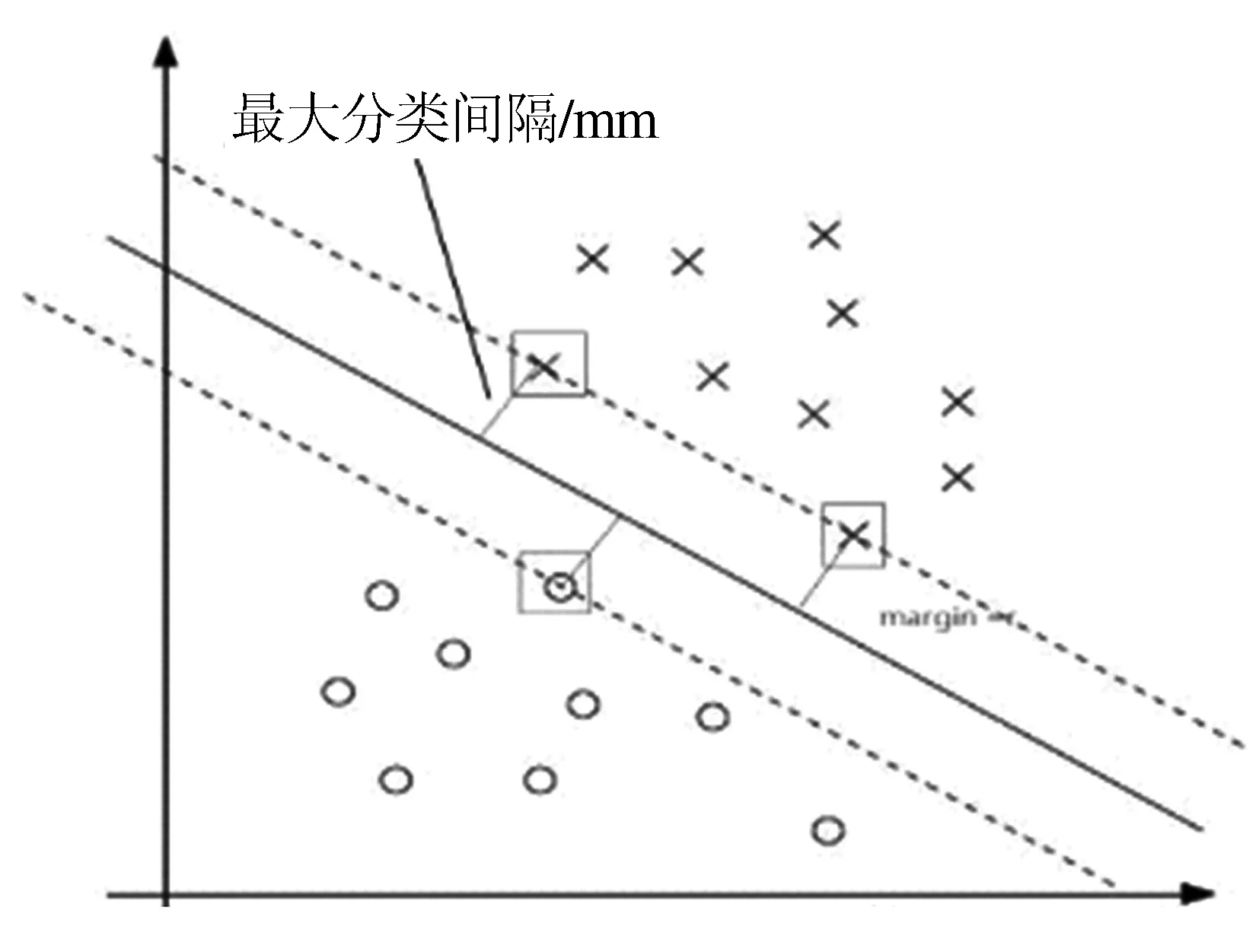
图8 支持向量机最大分类间隔Fig.8 Maximum classification interval of support vector machines
3 实验结果与分析
为了说明结合LBP和SVM表情识别方法的有效性,本文采用CK+数据库进行实验评估。CK+数据库是CK数据库的扩展库,是由卡内基梅隆大学建立的一个有生气、厌烦、恐惧、开心、平常、伤心、惊讶7种表情的表情序列数据库。实验随机选取表情库中50位测试者的表情序列为训练集,在剩余的测试者中随机选取30位测试者的表情序列作为测试集。本文将数据集中的视频合成为一段大小为640×480,帧率为30的avi格式视频来模拟摄像头采集的图像展示实验效果。7类表情的识别效果如图9所示,分别对应平常、开心、厌烦、惊讶、生气、恐惧和伤心等表情。
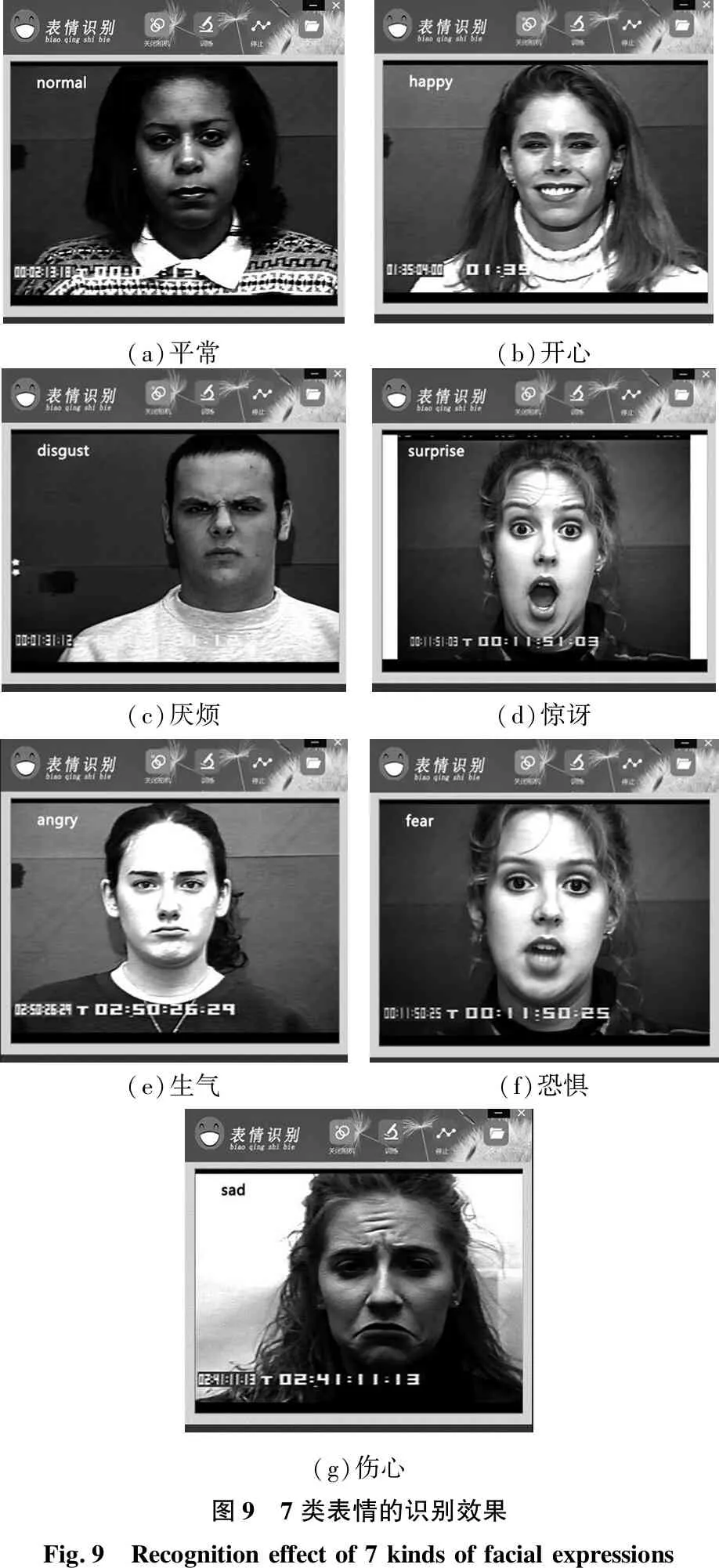
(a)平常(b)开心(c)厌烦(d)惊讶(e)生气(f)恐惧(g)伤心图9 7类表情的识别效果Fig.9 Recognition effect of 7 kinds of facial expressions
为了比较不同表情识别算法的性能,本文采用文献[3]、文献[5]和本文算法统计20次表情识别实验结果。图10所示为不同算法7类表情的平均识别率。
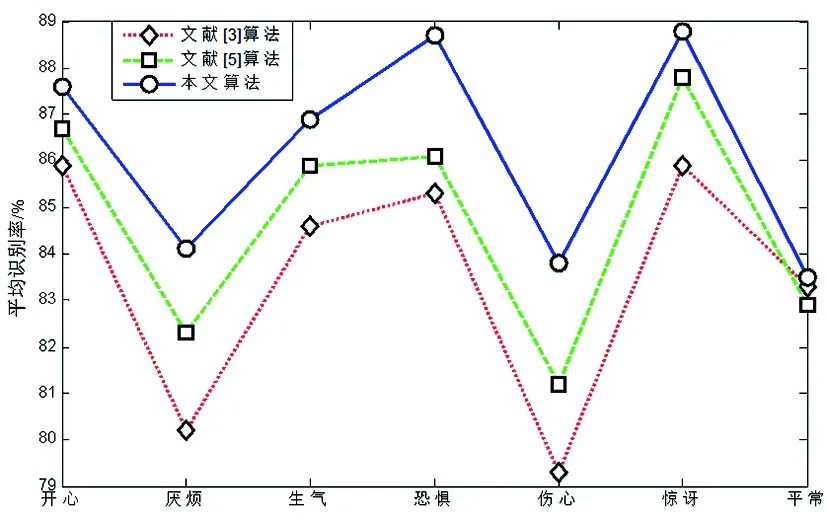
图10 不同算法7类表情的平均识别率Fig.10 Average recognition rate of 7 kinds of facial expressions in different algorithms
不同算法的综合性能比较见表1。从图10和表1可以看出,本文算法在保证识别实时性的同时,相对于其他两种算法平均识别率有了一定提高。
表1 不同算法的综合性能比较
Tab.1 Comprehensive performance comparison of different algorithms
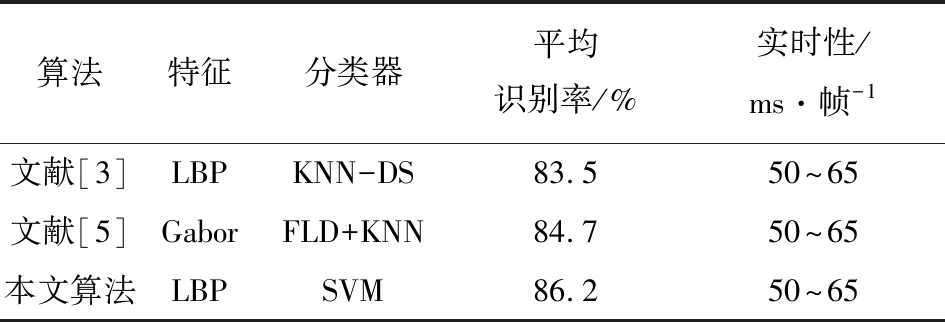
算法特征分类器平均识别率/%实时性/ms·帧-1文献[3]LBPKNN-DS83.550~65文献[5]GaborFLD+KNN84.750~65本文算法LBPSVM86.250~65
4 结束语
本文提出一种计算简单快速的LBP特征结合SVM进行决策表情分类的方法,实现了人脸表情判别在视频方面的应用。通过LBP算子检测人脸,并利用多级级联回归树模型对人脸68个关键点进行训练,提取脸部表情的几何特征,并依据此特征结合SVM来判别人脸表情,进而完成7种表情的分类。通过实验表明,本文算法与其他算法相比识别性能有了一定提高,同时保证了表情识别的实时性。但是本文算法还不能实现对姿势的要求,侧面人脸表情还不能得到检测识别。
