无人驾驶汽车关键技术研究
2020-04-20蒋孙权
蒋孙权


摘 要:近些年来,无人驾驶技术作为变革性划时代的技术被提出,已经取得了飞跃式的发展。无人驾驶车辆以增强公路安全,解决交通拥堵,提高驾驶效率,减少空气污染为宗旨,得到大力发展。为此,对国内外学者在无人驾驶汽车的关键技术的研究问题进行了概述,并根据目前的研究进展,对无人驾驶汽车的关键技术今后的研究方向进行展望,为以后的发展提出参考和建议。
关键词:无人驾驶;关键技术;路径规划;轨迹跟踪
无人驾驶汽车现阶段处于市场研究与技术发展阶段,有关专家与机构预测2021年无人驾驶汽车可以全面上市。约至2035年,仅中国就将有约860万辆自动驾驶汽车。无人驾驶要求,汽车在无人驾车的情况下安全地送达乘客,且要求汽车注重低成本、低维护、高效率、稳定性、舒适性等原则。本文将对于无人驾驶中涉及的多项关键技术进行论述研究。
1 无人驾驶汽车简介
无人驾驶汽车系统可分为四个部分:任务决策、环境感知、路径规划和车辆控制。
1.1 任务决策
无人驾驶车辆在行驶过程中存在着诸多的任务,车辆的位置、路径、环境都对系统选择任务的优先性和工作量等存在一定的影响。任务决策讲究实时性与有效性,随实时环境变化而快速有效地决策,属于动态系统。
1.2 环境感知
环境感知作为无人驾驶车辆的眼睛与触觉,实时感知道路环境的变化与整合。主要通过以下两个途径:一是通过无人驾驶车辆的GPS/IMU、LIDAR、摄像头、雷达和声呐等传感部件对车道路识别、交通标示与信号、行人、车辆等环境感知,实现车辆定位、物体识别和跟踪等行为;二是通过通信网络传递外部环境,如车联网下道路、车辆、停车场等交通信息变化情况,由通信中心统一信息收集与传递。
1.3 路径规划
路径规划是指在道路实时环境情况下,寻找一条起点至终点的安全行驶路线,并以路径长度最短或时间最短、能量消耗最少等原则。总体可分为两类:全局路径规划与局部路径规划。全局路径规划主要是在已知地图的情况下,利用已知的局部信息,规划一条最优化且可行的路径。局部路径规划主要是在突发情况(即外部实时环境变化)时,生成的局部行驶路径。因此,局部路径规划在全局路径规划的前提下,行驶过程中适应实时外部环境变化而规划,生成最优化的行驶路径。
1.4 车辆控制
车辆控制是指无人驾驶车辆在路径规划的前提下,通过环境感知,对车辆实现横向与纵向的控制,如车辆跟随速度控制、超车的转向控制、紧急情况的制动控制。车辆控制关系着无人驾驶车辆如何实现时间、空间两方面的最优化解,减少车辆与路径规划之间的误差。
2 无人驾驶车辆的关键技术
无人驾驶车辆控制技术是由传感感知、自主控制、自主学习、机械动力学、系统集成与优化、能耗与散热管理等诸多前沿科技学科组合而成的一门综合技术。在无人驾驶车辆技术发展的历程中,与现阶段所遇到的瓶颈,无人驾驶车辆的关键技术主要可分为以下几个方面:
2.1 环境传感与定位技术
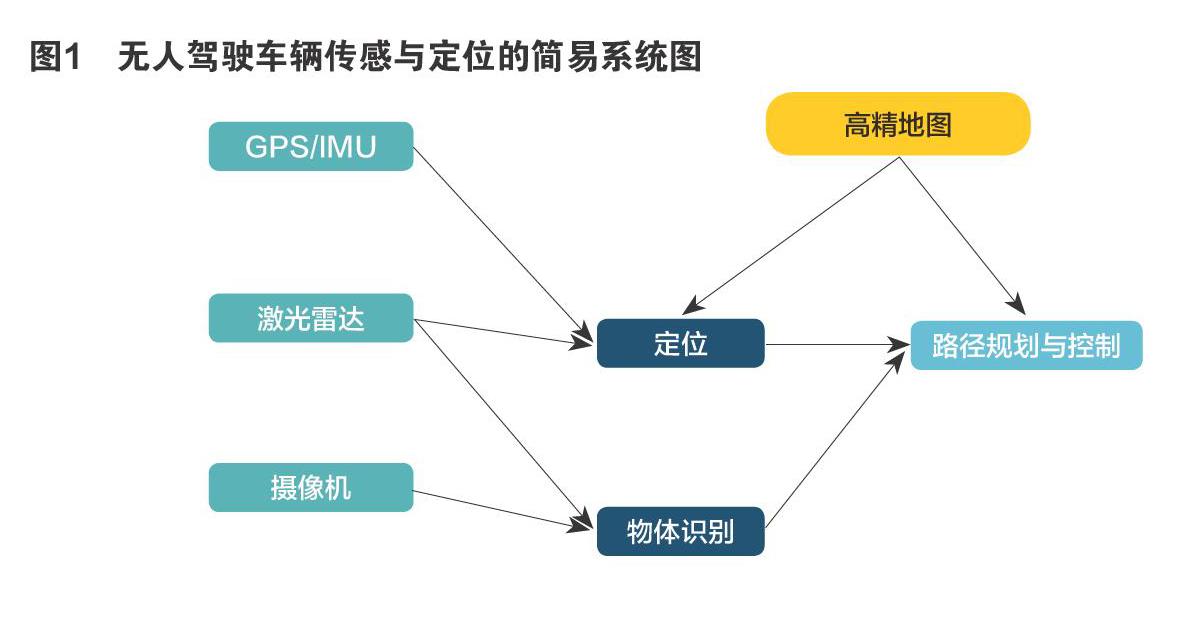
无人驾驶车辆装备有许多不同类型的主传感器,通过传感器对车辆周围的环境进行感知,将不同传感器的数据有效融合,提炼出车行环境信息以及车行状态信息。目前,常用于无人驾驶车辆的传感器有:GPS/IMU、摄像机、激光雷达(LIDAR)、雷达、声呐等。图1为无人驾驶车辆传感与定位的简易系统图。以下主要介绍GPS/IMU与激光雷达的技术应用。
2.1.1 GPS/IMU
GPS的更新频率低(10Hz),在车辆快速行驶时很难给出精准的实时定位。惯性传感器(IMU)的误差会随着时间的推进而增加,只可在短时间内依赖IMU进行定位。GPS定位精准但更新频率低,IMU更新频率高但误差累积大。因此,对GPS与IMU两种定位传感器运用卡尔曼滤波的传感融合。GPS定位、弥补与IMU的精准性结合,实现无人驾驶车辆实时精准的定位。图2为GPS与IMU传感器的融合定位示意图。
2.1.2 激光雷达
激光雷达(LiDAR)通过发射激光,接收-反射的始建于角度,推算目标物体的距离与位置信息。LiDAR与一般的雷达相比,检测距离更远,精准度更高,可达厘米级。LiDAR在无人驾驶车辆中主要可用于高精地图的绘制,障碍物的检测;若在地图信息已知的情况,可用LiDAR对比收集的信息,实现精准的定位。
2.2 无人驾驶路径规划与寻径技术
2.2.1 路径规划
路径规划是在环境传感识别后获取的地图环境信息的基础下,规划与决策出一条最优化的行驶路径。其前提出确定规划路径上的位置与环境信息,比如交叉口的转弯半径,障碍物的形状大小位置,车道路信息等。目前路径规划处于无人驾驶试验园与定制结构化道路环境下的试验与调试阶段,并开展在突发情况下,无人驾驶车辆的局部路径规划能力。
(1)全局路径规划。全局规划路径是在已知环境信息下,规划出发点到目的地的最佳路径,但不加入行驶过程中的环境信息。目前常见的全局路径规划算法可分为下列几种类型:栅格法、可视图法、自由空间法、蚁群算法、神经网络法等。
(2)局部路径规划。局部路径规划是基于实时获取的环境信息,规划出适应环境变化的局部路径。局部路径规划由于外部环境未知,因此算法难度大,环境复杂度高,因此尚未出現最优化的局部路径规划算法。局部路径规划中应该用最广泛的算法有遗传算法、人工势场法及模糊逻辑控制法三种。
2.2.2 路由寻径
此路由寻径区别于常见的谷歌或百度地图的导航,无人驾驶车辆的路由寻径,需要计算路径模块的行为决策和动作规划等,需要考虑无人驾驶车辆执行特定动作控制之间的难易程度,寻找一条最为优化的路径。无人驾驶车辆常见的路由寻径的最短路径算法主要有两种:Dijkstra算法和A*算法。(1)Dijkstra算法是一种常见的图论中的最短路径算法。通过给定初始点(源节点),寻找与下一节点之间的最短距离。对周围每个点的递进式查询,考察最近路径点,最终达到终止点,该最短距离集合S即为输出的最优路径结果。(2)A*算法是一种启发式的路径规划算法,主要用来完成栅格地图的路径搜索,其规划结果能满足路径最短,搜索效率相比Dijkstra算法和贪心算法更高效。
2.3 轨迹跟踪控制技术
在已规划的轨迹路径下,通过车辆的驱动/制动系统、转向系统完成车辆的侧向运动与纵向运动的控制,实现换道、超车、跟随等动作,同时兼顾行车过程的安全性、舒适性和稳定性等原则。汽车的纵向和侧向控制发生耦合以及车辆参数的不确定性,所以需分别设置控制器并解耦。目前应用较广的控制算法有PID算法、最优控制、模型预测控制算法、鲁邦控制法、模糊控制和滑膜控制等等。图3为基于PID的控制算法系统。
3 未来展望
(1)环境传感技术:LiDAR的高精度测量与感知,是无人驾驶汽车环境传感技术绕不过去的技术,但现阶段的当务之急是如何快速把其成本大幅降低,满足广大市场的需求。
(2)无人驾驶路径规划与寻径技术:无人驾驶各模块控制规划问题并不难,难在将控制问题的各个上下游模块解决方案配合协调效果,才是未来无人驾驶路径控制的难点和挑战所在。
(3)轨迹跟踪控制技术:轨迹跟踪是在路径控制的前提下完成的各种控制动作,未来研究重难点在动作控制的前提下,兼顾行车过程的安全性、舒适性和稳定性等原则。
4 总结
本文研究无人驾驶车辆的控制系统,首先阐述了无人驾驶车辆的系统构成,主要研究无人驾驶车辆的关键技术,环境传感与定位技术、路径规划与寻径技术和轨迹跟踪控制技术。在研究过程中主要分析了现阶段无人驾驶控制技术的研究现状、研究重点和所遇的瓶颈,有助于提高无人驾驶控制技术研究的系统化与逻辑化,为无人驾驶车辆后续学习者提供全面的知识基础。
基金项目:2018年浙江省教育厅一般科研项目(Y201839122)。
参考文献:
[1]万璐.无人驾驶概念股成新的风口[J].理财, 2016(02):58-59.
[2]孙正良.美国自动驾驶汽车道路测试法规简介[J].汽车与安全,2016(06):82-85.
[3]庄雷雨.典型路况下无人驾驶车辆局部路径规划方法研究[D].武汉:武汉理工大学, 2017.
[4]张婷.基于虚拟场景的路径规划技术研究及应用[D].大庆:东北石油大学,2007.
