智能无人系统环境感知计量评价研究
2020-04-08姜延欢杨永军李新良梁志国吴娅辉刘渊田森
姜延欢 杨永军 李新良 梁志国 吴娅辉 刘渊 田森
摘要:智能无人系统环境感知能力是确保其效能最大化的核心因素。本文针对智能移动机器人、无人机、水下机器人等不同类型智能无人系统的计量评价技术研究现状进行归纳总结,并从机/车载传感器、智能无人系统单体感知、同构/异构无人系统集群协同感知三个层面,以及数据准确、信息可靠等不同维度分析环境感知计量评价的关键技术及解决方法,为提高智能武器环境感知能力开展计量技术研究明确发展方向。
关键词:智能无人系统;无人集群;环境感知;性能指标;计量评价
中图分类号:TJ06文献标识码:ADOI:10.19452/j.issn1007-5453.2020.12.011
由人工智能引领的新一轮科技革命和产业变革推动了武器装备的跨越式发展,武器装备的智能化程度不断加深,无人机(UAV)、无人水下航行器(UUV)、无人地面车(UGV)等新型智能无人系统不断列装部队[1-4]。人机协同、同构/异构无人集群协同等作战模式也不断深化,彻底颠覆了传统的战争理念[5-6]。
目前,美国国防预先研究计划局(DARPA)支持开发的Packbo机器人、QinetiQ公司的“龙行者”机器人,以色列的“守护者”无人车等均具有态势感知、自主机动和独立决策等能力,可以执行侦察巡逻、火力打击、战斗支援等作战任务,并实现了服役[7]。俄罗斯研发的“平台-M”地面机器人(6台)、“暗语”轮式机器人(4台)和多架无人机组成编队协同作战。美国DARPA“进攻性蜂群战术”已取得突破性进展,并拟于2020年12月进行外场试验,所提出的忠诚僚机项目也取得重大突破。不难发现,智能传感及智能算法等技术共同推动的环境感知技术是智能无人系统迅速发展的主要原因。
然而,与智能无人系统技术成熟度不断加强、无人系统协同作战模式应用范围不断扩大相对应的却是环境感知系统计量评价技术极其不健全,限制了智能无人系统环境感知精度和能力的提升,无法为智能无人系统的试验和研制提供计量保障,同时也限制了不同研究机构产品性能之间的比对。亟需通过将计量引入智能无人系统的研制中,促进智能无人系统的正向研发。为此,本文对智能无人系统环境感知的计量评价现状进行分析,并梳理出环境感知计量评价的关键环节及未来的重点研究方向。
1智能无人系统计量评价现状
目前,智能无人系统计量评价的研究非常有限,主要是以美国国家标准与技术研究院(NIST)为主导的计量机构。各大厂商主要还是侧重于智能无人系统的研制及测试。但是测试环境往往无法确保多影响因素的受控,也尚未形成普适的、通用的测试方法。
1.1智能移动机器人
目前,针对智能移动机器人的研究大都集中在测试方面。美国宇航中心测试月球探测车的综合能力时,将试验样车在特定环境下的感知决策、导航定位能力、决策能力、综合能力的任务执行时间作为考核的主要指标。美国洛杉机大学为了测试自主化机器人的可靠性,将其处于恶劣环境,以最长工作时间作为考核标准。美国机器人学会将机器人分类,对每项能力的权重采用投票确定,设置特定环境进行评分,机器人分类、每类机器人的测试内容、测试权重、环境设置由50位全美的机器人学专家投票决定。相关的研究虽然明确了智能移动机器人的功能指标,但是尚未形成比较全面的计量评价指标体系,也尚未形成科学有效的评价方法。
NIST是智能无人系统计量评价技术研究的先驱者。针对各种类型的应急响应机器人的计量评价开展了大量的研究,并形成了体系化的计量评价能力,主要包括应急响应机器人的机动性、操作能力、传感器及安全性等方面,同时具备各种典型场景的测试能力,形成了比较完善的标准测试方法及指标体系。目前已针对50余种不同类型的地面移动机器人开展相应的计量评价技术研究(见图1),积累了丰富的经验[8]。此外,NIST也针对机器人敏捷性、人机协同等性能的计量评价开展相应的研究,以期能够形成相应的性能指标、测试方法、信息模型、数据集和规划方法。
1.2水下機器人
目前,国外主流的水下机器人研究机构针对水下机器人性能的测试已经形成了比较成熟的测试产品和测试手段,但是所对应的计量评价技术仍极不完善。
美国麻省理工学院(MIT)基于水下机器人测试所需要的条件设计的水池试验系统,能够实现随机波浪制造、激光感应、数据采集等功能,能够实现水下机器人全性能参数的测试(见图2)。英国Saab Seaeye公司在水下机器人云台、水下机器人动力控制系统、水下无刷电机推进器及Led水下机器人探照灯等方面形成了比较成熟的测试手段。美国伍兹霍尔海洋研究所能够实现整机性能测试、俯仰及船艏角度测试、推进器性能测试、机械手作业能力测试、动力定位能力测试、摄像机观测能力测试、通信及相应能力测试等。其相关的测试试验均在海中进行,利于机器人的研发[9]。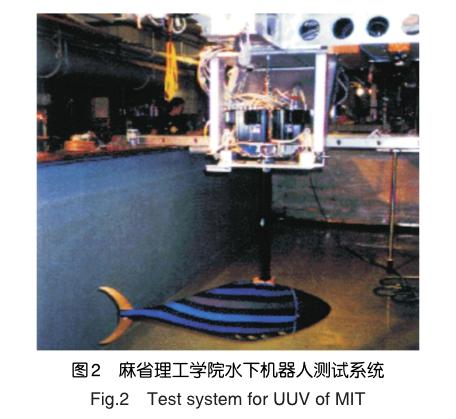
NIST针对水下机器人的计量评价开展了长期的研究,目前已经形成多种标准测试方法,用以支撑水下机器人的研制及试验(见图3)。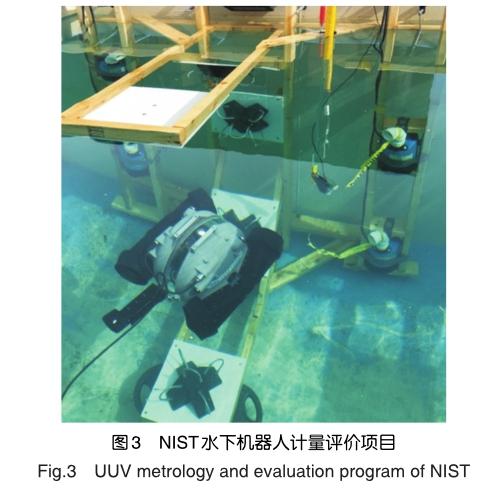
1.3无人机
在小型无人机的计量评价方面,目前主要聚焦在垂直起降系统和手动固定翼系统方面。以NIST为例,目前针对小型无人机系统(见图4)正在开发的计量评价方法有20余种,目前能够实现无人机机动性、有效负载功能、感知能力、能源、无线通信、耐久性、安全性等方面的计量评价能力。
1.4无人集群
随着智能无人系统环境感知、自主决策、执行控制、5G技术等核心关键技术的不断突破,以及人工智能技术的赋能,加之智能无人系统集群具有编队灵活、功能多样性、使用成本低等优势,同构/异构无人集群必将是智能无人系统的发展趋势[10-11]。
目前,国内外针对智能无人系统单体的计量评价技术均开展了不同程度的计量评价研究,更深层次的计量评价技术的研究(如环境感知等)也逐渐提升到战略层面。针对同构/异构无人系统集群的计量评价技术的研究鲜有报道。
综上所述,不难发现目前针对不同无人系统的计量评价技术的发展极不均衡,不同研究机构针对相同无人系统的计量评价项目、手段及方法均存在较大的差别,并没有统一的标准。特别是对于智能无人系统最为重要的环境感知的计量评价仍主要停留在传感器层面,这极大地阻碍了不同研究机构之间无人系统性能比对的难度,也加大了用户对无人系统选型及装备的难度。此外,随着同构/异构无人系统集群研究的不断深化,针对无人集群的协同感知的计量评价能力也亟需开展。
2智能无人系统环境感知计量评价关键环节
2.1机载传感器
为了实现效能的最大化,智能无人系统往往都会搭载各种类型的传感器,以实现环境信息和自身状态信息的精确感知,为无人作战系统的自主决策提供必要的技术数据。
目前针对传感器的校准主要还是基于实验室标准条件进行校准,当智能无人系统在高低海拔、高低温度等复杂环境条件下运行时,无法确保传感器测量数据的准确可靠。因此,亟需实现多参数耦合条件下传感器的计量校准能力。
在此基础上,结合实验室环境、复杂环境、现场环境下海量的计量校准数据,建立完善的传感器计量校准数据库,同时结合深度学习、云计算等先进技术方法,形成基于数据驱动的校准及补偿,解决智能无人系统动态量值的溯源问题,为全链条的建模分析、不确定度评价、动态误差补偿修正提供最基础的准确数据支撑。
2.2单体环境感知
智能无人系统主要通过多传感器融合的方式实现不同类型传感器信息不同层级的融合,并实现智能无人系统环境建图、定位等关键功能。但是由于测量的不确定性、噪声的干扰、传感器信息的关联及滤波算法本身的问题等,往往会影响测量结果的准确性。以智能移动机器人的定位精度为例,其定位精度在1~10cm,这对于扫雷、排爆等特殊用途的机器人而言是不能接受的。因此,应全面分析动态感知的误差来源、相关性和传递关系,形成科学有效的计量评价方法,确保多传感器融合后的信息输出的可靠性。
智能无人系统环境感知计量评价需重点解决图像识别、语音识别、建图及定位、目标探测等功能层面的计量评价技术(见图5)。首先实现实验室环境条件下的标准计量评价方法,延伸至复杂环境下的计量评价,最终实现面向现场复杂环境的计量评价。对于智能无人系统而言,计量对象不再是传统的计量器具,而是多系统、多维度的复杂系统,如何提炼核心的计量评价指标是开展计量评定的基础。在此之上,需结合智能无人系统的特殊性,形成定制化的计量评价方法及评价系统。除此之外,还需进一步发挥计量的特殊性,实现关键性能参数及系统层级的综合不确定度评定。对于智能无人系统而言,其所面临的参数更加复杂,甚至超出传统计量参数的范围,如图像识别、语音识别等功能,如何提炼计量指标是需要深入挖掘的问题。此外,标准语音数据库、标准图像数据库等数字化的标准的重要性也日益凸显,如何在该领域发挥计量的保障作用也亟须解决。从智能无人系统的本质而言,其不单单是多传感器的简单叠加,而是卡尔曼滤波、粒子滤波、深度学习等算法层面的深度融合,对实现计量评价技术与数据算法的融合,实现融合信息的有效评价具有重要的意义。
通过对智能无人系统进行深入的挖掘分析,最终形成完善、科学的计量评价指标体系,实现智能无人系统环境感知能力的有效评估,为武器装备的试验及研制提供计量保障,实现真正意义上的“科技要发展,计量需先行”。
2.3智能无人集群协同感知
随着智能无人系统的自主化程度不断提升和5G等新一代通信技术的高速发展,智能无人集群的协同能力得到飞速的提升,极大地解决了智能无人系统单体全局感知能力不足、作战功能有限的限制。同构/异构智能无人集群协同能够实现集群网络中各节点之间的实时通信,确保信息共享,形成全方位立体式的感知网络,为集群中无人系统的协同任务分配及协同响应形成技术支撑作用,提升整体的协同效能。
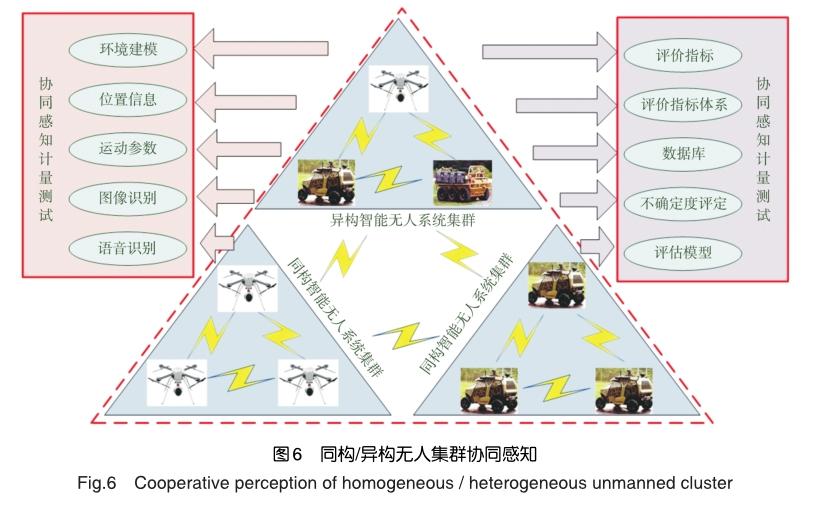
对于智能无人系统集群而言,所面临的工况更加复杂,智能无人系统集群的计量评价不仅仅是集群中各智能无人系统的简单相加,而是多参数高度耦合的、复杂非线性的问题。所面临的技术困难也将成倍增加。对于智能无人集群协同感知而言,主要需解决的是分布式结构条件下环境建模、位置参数、运动参数、图像识别、语音识别等协同感知能力(见图6),基于所能够提取的多维度参数结合先进数学理论进行分析,提炼可靠的计量评价指标,形成协同感知的计量评价体系,基于數据驱动及模型驱动的方法,建立可靠有效的环境感知评价模型,最终实现特定及复杂场景环境下的验证。
从技术实现层面而言,如何实现复杂场景下多目标、多因素的计量评价成为需要重点考虑的因素,现有的技术手段能否满足智能无人集群提出的复杂测试需求,如何科学有效地实现关键参数的计量评价均成为不得不考虑的问题。同时,考虑到智能无人集群维度的迅速增加,也需考虑如何结合先进的理论及数值仿真技术与计量评价的有效结合,形成相应的虚拟计量评价方法。
除此之外,对于智能无人集群而言,由于通信引入的延时问题是协同感知评价的重要指标,探究基于量子精密测量的在线及原位校准技术,实现计量校准技术的扁平化,对于提升智能无人集群的作战效能同样具有重要的现实意义。
3未来研究重点和方法
随着智能无人系统智能化程度的不断加深,针对其所开展的智能评价技术已经不再是传统的针对传感器的计量评价,所对应的维度也亟需拓展,从确保传感器数据准确到多传感器融合信息的可靠,突破复杂系统不确定评定技术,再到感知系统的可靠评价,并最终实现实验室标准环境下的计量校准到面向战场复杂环境的多参数耦合条件下的计量评价,解决计量校准“最后1km”的问题。要解决这个问题,需要从以下几个方面展开:
(1)多部门多专业结合智能无人系统感知的特性,结合先进测量体系理念,实现理论、仿真及试验等研究手段的深度融合,形成多手段、全方位的计量评价方法及模型。
(2)梳理智能无人系统的计量评价指标体系,细化各评价指标的计量校准方法。此外,为了应对新技术带来的环境感知的技术突破,也亟须研制相对应的计量仪器实现关键参数的计量校准。
(3)人工智能技术大背景下也亟待实现智能传感、5G技术、大数据、区块链、量子计量等技术与人工智能技术的深度融合,基于智能无人系统计量校准数据的深度挖掘、分析,实现重要指标参数的在线及原位校准,为智能无人系统的研制及试验提供计量保障。
4结论
随着人工智能、智能传感、5G等技术的快速发展,智能无人系统的技术成熟度得到了迅速的提升,无人机、无人车等智能无人系统及其所组成的同构/异构无人系统集群颠覆了传统的作战模式,然而,相应的计量评价技术却无法为现有的技术发展形成支撑作用,亟须开展相关的计量评价技术研究。主要结论如下:
(1)智能无人系统环境感知是充分发挥其效能的基础,需从机/车载传感器层面、智能无人系统单体感知层面以及同构/异构无人集群三个层面分别开展计量评价技术研究,以提供计量保障。
(2)现有的实验室环境下的计量校准已无法满足智能无人系统全工况、大范围的使用环境,从理论、仿真及试验三个层面相结合,实现复杂环境下的计量校准,解决智能无人系统动态量值的溯源问题,为全链条的建模分析、不确定度评价、动态误差补偿修正提供最基础的准确数据支撑。
(3)在确保传感器数据准确的基础上,从多传感器融合的角度出发,探究智能无人系统环境感知的计量评价指标、方法及评估模型,实现复杂系统的综合评定,确保环境感知信息的准确可靠。
(4)由智能无人系统单体拓展至同构/异构智能无人集群的计量评价,实现协同算法与智能无人系统单体算法层面的深度挖掘,结合计量参数实现无人集群的有效评估。同时充分发挥量子计量扁平化的优势,实现量值的在线化校准。
参考文献
[1]Lu Y,Xue Z,Xia GS,et al. A survey on vision-based UAV navigation[J]. Geo-spatial Information Science,2018,21(1):21-32.
[2]Lin C,Wang H,Yuan J,et al. Research on UUV obstacle avoiding method based on recurrent neural networks[J]. Complexity,2019,4(1):1-16.
[3]Unlu H U,Patel N,Krishnamurthy P,et al. Sliding-window temporal attention based deep learning system for robust sensor modality fusion for UGV navigation[J]. IEEE Robotics andAutomation Letters,2019,4(4):4216-4223.
[4]王海,陶呈纲,唐勇,等.无人机终端定约束条件下的定航程轨迹规划方法[J].航空科学技术, 2019, 30(9):130-134. Wang Hai, Tao Chenggang, Tang Yong, et al. Fixed Distance path programming method for UAV under the constraint of fixed terminal[J]. Aeronautical Science & Technology, 2019, 30(9):130-134.(in Chinese)
[5]Zhao X,Dong Y,Yuan X J,et al. Improvement of unmanned aerial vehicle cluster atmospheric monitoring algorithms[J]. Journal of Environmental Protection and Ecology,2019,20(3):1068-1075.
[6]Ammad U M,Ali M,Le J D,et al. UAV-assisted dynamic clustering of wireless sensor networks for crop health monitoring[J]. Sensors,2018,18(2):555.
[7]鄒丹,李晓楠,杨浩敏.军用机器人的研究和应用[J].科技导报, 2015,33(21):54-58. Zou Dan, Li Xiaonan, Yang Haomin. Research and application of military robots[J]. Science & Technology Review, 2015,33(21):54-58.(in Chinese)
[8]Coursey B. Standard test methods for response robot[R]. Gaithersburg:National Institute of Standards and Technology,2011.
[9]陳元杰,葛锐,孔新雄,等.水下机器人测试及相关机构介绍[J].计测技术, 2014, 34(5):8-12. Chen Yuanjie, Ge Rui, Kong Xinxiong, et al. Introduction of underwatervehicletestingtechnologyanditsresearch organizations[J].Metrology&Measurement Technology, 2014, 34(5):8-12.(in Chinese)
[10]陈黎.军用无人机技术的发展现状及未来趋势[J].航空科学技术, 2013(2):11-14. Chen Li. Development and trend of military UAV Technology[J]. Aeronautical Science & Technology, 2013(2): 11-14. (in Chinese)
[11]杨春宁,杜黎明,李春.未知区域无人机协同搜索方法及效率分析[J].航空科学技术, 2019, 30(10):56-63. Yang Chunning, Du Liming, Li Chun. Methods and efficiency comparison of UAV swarms collaborative search in unknown area[J]. Aeronautical Science & Technology, 2019, 30(10):56-63.(in Chinese)
(责任编辑王为)
作者简介
姜延欢(1990-)男,博士,工程师。主要研究方向:人工智能。
Tel:010-62457426
E-mail:jiang_yanhuan@163.com
Research on Environmental Perception Metrology and Evaluation Technology of Intelligent Unmanned System
Jiang Yanhuan*,Yang Yongjun,Li Xinliang,Liang Zhiguo,Wu Yahui,Liu Yuan,Tian Sen
Science and Technology on Metrology and Calibration Laboratory,Aviation Key Laboratory of Science and Technology on Dynamic Testing and Calibration,AVIC Changcheng Institute of Metrology & Measurement,Beijing 100095,China
Abstract: The environmental perception ability of intelligent unmanned system is the core factor to ensure its maximum effectiveness. The metrology and evaluation technology of different types of intelligent unmanned system such as intelligent UGV, UAV and UUV are summarized. The key technologies and solutions of environmental perception metrology and evaluation from three aspects such as aircraft/vehicle sensor, perception of individual intelligent unmanned system, collaborative perception of isomorphic/heterogeneous unmanned system cluster, and different dimensions such as accurate data and reliable information are analyzed.
Key Words: intelligent unmanned system; unmanned cluster; environment perception; performance index; metrology evaluation
