空气弹簧悬架系统控制模型研究*
2020-03-26彭福泰
彭福泰
(湖北汽车工业学院 汽车动力传动与电子控制湖北省重点实验室,湖北 十堰 442002)
0 引 言
随车辆在我们的生活中扮演的角色越来越重要,车辆的舒适性、操纵稳定性、稳定性等性能越来越受到人们的重视。而车辆的悬架系统直接影响到这些性能。因此笔者主要围绕汽车的振动来进行研究和改进。路面的好坏、车速的大小和车辆的性能都会影响车辆的振动幅度,而振动又会通过车轮、悬架、车身来传递给驾驶员和乘客,从而影响到乘客的舒适性。而且对于车辆来说,剧烈的振动会导致车辆的损坏,加速车辆部件的磨损和断裂,带来安全上的隐患,增加了使用者的维修等成本。由于振动引起的车轮跳动也会使行驶的操稳性和经济性以及动力性的下降,造成一系列的问题。
传统的悬架相对于空气悬架,具有刚度特性不可变,振动噪声较大等缺点,而且空气悬架自振频率较低且基本保持不变的特点,引起了工程师对空气悬架的研究兴趣。空气悬架系统主要分为膜式、囊式和复合式三类。通过气泵的充放气,来实现刚度的可调。笔者首先对空气弹簧的力学性能进行分析,包括刚度特性和频率特性,然后对PID控制器研究介绍和设计,建立空气弹簧的仿真模型,研究在不同车速和不同路况输入下,振动特性的变化对车辆带来的影响,通过仿真分析,对空气悬架和传统悬架在平顺性上的性能进行比较。
相比于国外,我国的汽车工业发展比较晚,对于空气弹簧悬架的研究也晚于西方国家,建国后通过早期探索阶段认识到空气悬架的优势,引进消化吸收着手进行研究。总结汽车空气悬架核心零部件和系统的先进技术和研究进展,进行创新研究,逐步明确后续产品的发展方向、技术研发[8]。1958年,沈阳机车车辆研究所首次尝试在试验车“东风号”客车上安装空气弹簧悬架,并取得了成功[9]。1959年,郭孔辉院士对包括膜式、囊式和复合式等多个类型的空气弹簧的动静态特性进行了初步研究[10]。20世纪80年代,长春汽车研究所为武汉客车制造厂研发设计了与其车型相匹配的空气弹簧悬架,效果较好,车身振动频率也降低至1.1Hz左右,并且在质量上减轻了50 kg[11]。2011年江苏大学的徐兴、陈照章等结合热力学知识,对在充放气状态下的空气弹簧,建立了全主动的数学模型,为空气悬架的高度控制提供了理论上的依据[12]。2015年,吉林大学的周彤,对某款客车的空气悬架进行了参数匹配和相关控制策略,并建立试验系统[13]。我国在这领域虽然在核心技术上与国外还有一定的差距,但也取得了长足的发展和进步。
笔者选取的研究对象是膜式空气弹簧,首先是从力学特性的角度,对空气弹簧的刚度和频率特性进行分析和理论推导,搭建出空气弹簧悬架和传统悬架系统的1/4数学模型,建立微分方程,介绍并设计出PID控制器,在MATLAB/Simulink对空气悬架模型进行仿真,然后对比传统悬架系统,用平顺性评价指标进行对比分析。
1 空气弹簧的刚度阻尼特性
在空气弹簧的弹簧力计算中,由于空气弹簧的变形从而引起空气弹簧内压,空气弹簧内部气体质量,有效面积的变化等,而空气弹簧的变形主要体现在高度的变化,因此空气弹簧的主气室体积,气体质量,有效面积都可以看成是高空气弹簧对其簧上质量起到隔振作用,而簧上质量的振动响应则是对空气弹簧减振作用的评价标准,由牛顿第二定律可以求得簧上质量运动微分方程:
式中:m1为空气弹簧簧上质量(kg);g为重力加速度(g=9.8 m·s-1);F为空气弹簧垂向受力(N)。

(1)
(2)
式中:p1为附加气室压强;p0为本体气室压强;mb为空气弹簧本体气室气体质量。
由于空气弹簧的变形从而引起空气弹簧内压,空气弹簧内部气体质量,有效面积的变化等,而空气弹簧的变形主要体现在高度的变化,因此空气弹簧的主气室体积,气体质量,有效面积都可以看成是高度的函数,令v1=v1(h),p1=p1(h),m1=m1(h),Ae=Ae(h),则有:
(3)
(4)
(5)
(6)
(7)
(8)
空气弹簧在无激励时,空气弹簧簧上质量使空簧刚度保持一个值即为静态高度h0,但当空气弹簧受到外界激励导致空气弹簧发生变化,会产生一个空簧动态高度h:
h=h0+(x-xg)
(9)
式中:h0为静态高度;h为空簧动态高度;h为空气弹簧受到激励产生的位移。通过式(9)求时间导数得方程:
(10)
得动刚度为:
(11)
(12)
式中:Ae为空气弹簧气囊的有效面积(m2);Al为空气弹簧想胶囊与附加空气室中间连接管路的有效面积(m2);xg为连接管路当中气体的位移(m);l为空气弹簧管路长度(m)。空气弹簧橡胶气囊和附加气室中联连接管路的气体质量视为恒定,同时考虑气体的惯性效应及其与关闭之间的摩擦,依据流体力学的空气弹簧阻尼计算,首先根据空气弹簧两气室压强变化之差来计算:
(13)
式中:在静高度时有(ρ1=ρ0);λ为管道阻力系数,ζl为局部阻力系数。
(14)
(15)
(16)
(17)
有管路空气弹簧的阻尼为:
(18)
进一步带入式(18),即:
(19)
式中:kt为管路阻力系数;v2为附加气室体积。
依据空气弹簧的刚度与阻尼数学表达式及其振动微分方程,知道了空气弹簧刚度和阻尼特性。
根据所研究文献[14],由空气弹簧的刚度特性计算知道当激励频率增高,系统垂向刚度随振幅的增大而增大。当附加气室的容积为零时,即为节流孔趋于无穷大使得情况时,空簧系统表现出只有主气室在单独作用。在低频段,随附加气室容积的增大,空簧系统的动态刚度在减小,在中部与高部频段,随着其附加气室的增大,空气弹簧的动刚度则在小幅度的增大。而空气弹簧附加气室在低频区对于其阻尼的影响则恰好相反,随着着频附加气室容积的增大,阻尼也增大,在中频区段,趋势与刚度相同,并且由于增速比较明显,会有一峰值,在高频去段,变化则相对不明显,趋于一常值。
当空气弹簧的管路较短时,该连接一般被认为是节流孔连接。当节流孔的容积为零时,即为节流孔趋于无穷小时的情况时,空簧系统表现出附加气室和主气室在连为一体共同作用。在中低频段时,随节流孔直径的增大,空簧系统的动态刚度在减小,且其变化变化比较明显,在高部频段,随着其节流孔直径的增大,空气弹簧的动刚度则影响不明显。而空气弹簧节流孔直径对于其阻尼的影响具体如下,随着着节流孔直径的增大,阻尼会减小,与激励频率呈现正相关。
首先针对刚度和频率特性进行力学分析;然后建立空气弹簧系统和传统悬架系统的1/4数学模型和微分方程,在热力学知识下对空气弹簧弹力进行计算,并在MATLAB/Simulink模块分别建立它们的仿真模型,对路面输入进行分析,建立路面输入的仿真模型。然后再建立整体的空气弹簧悬架1/4模型;设计PID控制器,结合上述整体1/4模型和路面输入,对整体模型进行仿真。通过车身加速度、悬架动行程与轮胎动载荷三个悬架性能评价指标的均方根值对控制器的悬架性能改善程度进行评价。
2 空气弹簧悬架系统控制模型的建立
空气悬架系统与很多因素有关,我们在建立数学模型的时候要做到有必要的简化,这样可能对结果有一些偏差,但整体模型会得到极大的简化,有利于我们的研究与分析。主要从以下几个方面进行简化:
(1) 忽略轮胎的阻尼特性。在实际的应用中,轮胎的阻尼特性对振动是有影响的,但与空气弹簧的阻尼值相比,就显得特别小,这时可以忽略。只考虑轮胎的刚度特性。
(2) 忽略传动系、制动系、转向系等的影响。只考虑空气弹簧和减震器带来的振动影响。
(3) 选取整车的空气弹簧系统数学模型。考虑空气弹簧受到主动控制力作用。
得到的模型如图1所示。
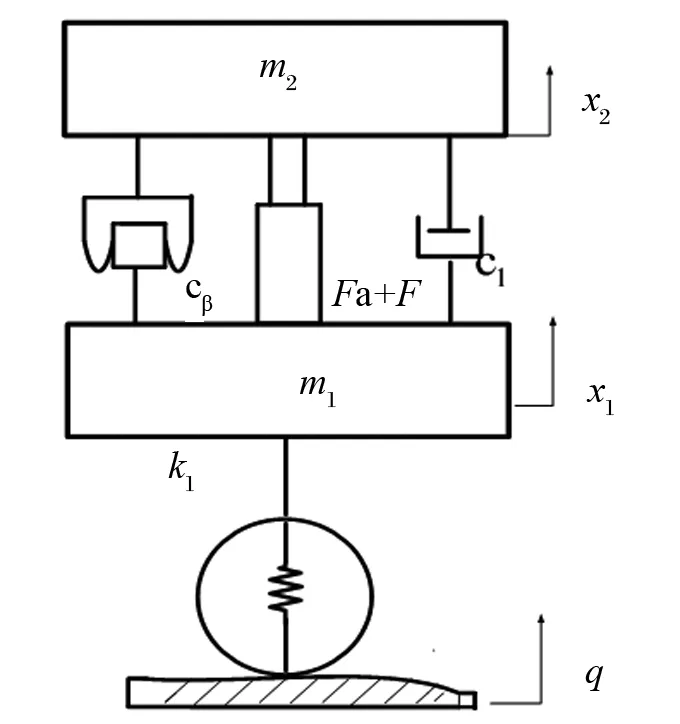
图1 空气弹簧悬架系统控制模型
当行驶路面条件改变时,气泵通过对空气弹簧充放气,从而产生主动控制力Fa,cβ为空气弹簧节流孔阻尼,空气弹簧的支撑力可以表示为Fa+F,得到空气弹簧振动的微分方程,如公式20所示:
(Fa+F)=0
k1(x1-q)-(Fa+F)=0
(20)
式中:m1为非簧载质量(kg);m2为簧载质量(kg);q为路面输入位移(m);k1为轮胎刚度(N/m);F为空气弹簧支撑力(N);c1为悬架阻尼系数(N/m);x1为车轮位移(m);x2为簧载质量位移(m);Fa为主动控制力(N)。
在对汽车振动的研究中,路面输入有着极大的影响。对汽车平顺性的分析中,模拟路面给车轮激励,这时就需要路面不平度的模型,一般上我们把沿道路长度I变化的垂直方向上的高度q(I)称为路面不平度在路面不平度的测量中,我们有专门的仪器水准仪来进行测量。测量得到的数据通过拟合,得到路面不平度的功率谱密度Gq(n)[15-17]:
(21)
式中:Gq(n)称作路面不平度系数,m3;W为频率指数,一般取2;n为空间频率,m-1,它是波长的倒数;n0=0.1(m-1),为参考空间频率。
根据所建立的空气弹簧数学模型,搭建分析模型,搭建空气弹簧有效压强、空气弹簧有效面积、空气弹簧弹力,路面输入模块,利用MATLAB/Simulink,进而用空气弹簧的仿真模型和传统悬架的仿真模型进行计算求解如图2、3所示。
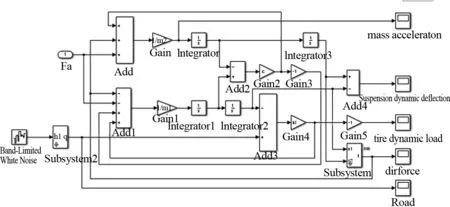
图2 空气弹簧悬架Simulink仿真图
由路面输入和传统悬架微分方程可同理得到传统悬架的仿真图(见图3)。
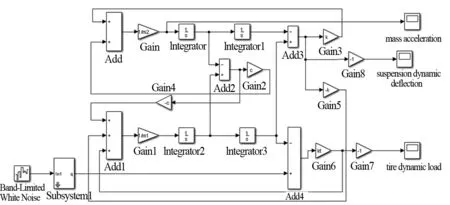
图3 传统悬架Simulink仿真图
评判悬架性能好坏的指标,参考汽车理论,一般用车身加速度、悬架动挠度和轮胎与地面的相对动载这三个指标来评价。在本文中,我们以期望的加速度与实际加速度差值为输入,以空气弹簧产生的主动控制力为输出,通过得到的空气弹簧悬架模型和PID控制模型,共同建立空气弹簧悬架系统主动控制的模型。模型如图4所示。
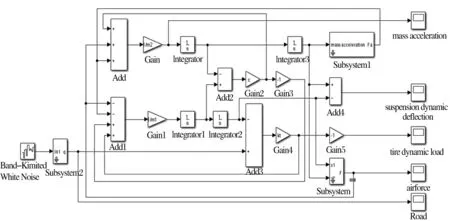
图4 PID控制空气弹簧悬架Simulink仿真模型
3 空气弹簧悬架系统控制仿真分析
如上所述,车身加速度、悬架动挠度和轮胎与地面的相对动载这三个评价指标评判着悬架性能的好坏,影响着乘客乘坐的平顺性、舒适性和驾驶的操纵稳定性。我们以这三个性能的均方根值进行评价。
根据建立的路面输入,可由路面滤波白噪声模型来得到路面激励曲线。由于我国C级路面占的比重比较大,而且本次研究的车辆对象为轻型的商用车。故本文分别将C级路面作为路面输入,C级路面车速选为80 km/h,将得到路面输入Simulink仿真曲线,如图5所示。仿真所需要的参数和参数数值大小如表1所列。
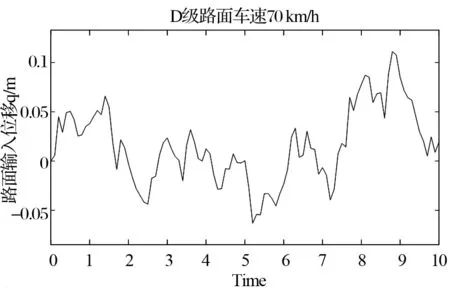
图5 C级路面车速80 km/h激励曲线
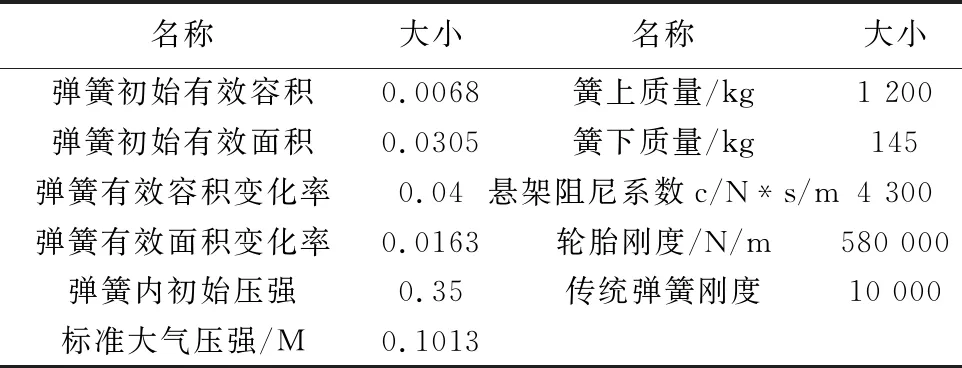
表1 空气弹簧悬架模拟仿真参数
根据前面的PID控制空气弹簧悬架仿真模型及路面激励,得到PID控制下的车身加速度、悬架动行程和轮胎动载荷曲线,将此结果与被动控制的空气弹簧悬架模型得到的车身加速度、悬架动行程和轮胎动载荷曲线进行比较。C级路面、车速为80 km/h条件下得到的评价指标。
改善情况对比,从图6可以看出,在PID控制策略下,车身加速度有了明显的减小。车身加速度的峰值在PID控制策略下差不多减小了一半,改善效果明显,使得乘坐的平顺性大大提高;在图7中,悬架动挠度在有些波峰上有些减小,但在一些区域内,动挠度反而还会有所增大。改善效果不是很明显。从图8可以看出,轮胎动载也有很大程度的减小,在峰值处有很大的改善,舒适性提高。
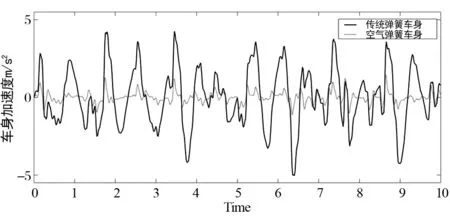
图6 C级路面80 km/h车身加速度曲线
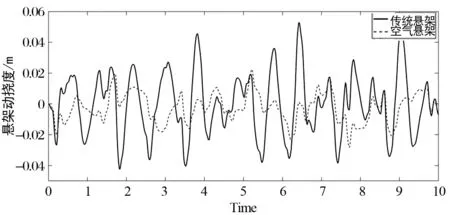
图7 C级路面80 km/h悬架动挠度曲线
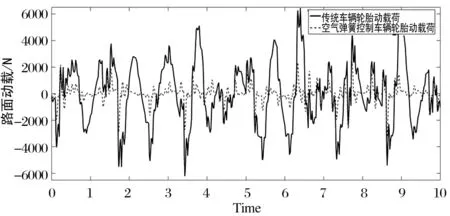
图8 C级路面80 km/h轮胎动载曲线
综合以上,在C级路面、80 km/h条件下,PID控制策略相对传统悬架在性能上有了很大的改善。从计算的结果可以看出,PID控制对车身加速度和轮胎动载有较好的改善。对悬架动挠度而言,由于三个评价指标会相互影响,使得悬架动挠度的改善效果不是太明显。但综合上来看,PID控制器对乘坐的平顺性和舒适性是有很大改善的。
4 结 论
以空气弹簧为研究对象,首先对它的分类和结构原理进行介绍,然后对空气弹簧的力学特性进行研究,之后建立空气弹簧仿真模型,设计PID控制器,用PID控制策略来对空气弹簧模型进行仿真,通过平顺性的评价指标来对空气弹簧系统和传统悬架系统进行比较,说明空气弹簧在PID控制器下能改善悬架的平顺性和舒适性。总结为以下几点:
(1) 空气弹簧的刚度具有非线性的特点,能更好的适应路面不断变化的要求,提高行驶的舒适性和平顺性。
(2) 空气弹簧能在PID控制器的作用下,根据路面实际的加速度,来适时通过气泵充放气得到主动控制力,使得空气悬架系统能适应不同工况的需求。
(3) 通过对传统悬架系统和空气弹簧系统的比较,在PID控制器下的空气弹簧系统能较大程度的改善行驶的舒适性和平顺性。
