一种基于流行排序的显著性目标检测的改进方法
2019-11-13温彬彬王丽佳李月朋胡雪花陈旭凤
温彬彬 王丽佳 李月朋 胡雪花 陈旭凤
【摘 要】该文对现流行的基于图的流行排序显著性目标检测算法[1]分析算法中存在的先验背景过于理想化的缺陷,提出了一种基于全局对比度的前景特征[2]特征与背景特征进行有机结合使得查询节点更为精准,从而使显著性检测更为准确有效。
【关键词】排序;检测;改进方法
中图分类号: TP391.41 文献标识码: A文章编号: 2095-2457(2019)29-0186-002
DOI:10.19694/j.cnki.issn2095-2457.2019.29.088
An Improved Method of Significance Target Detection Based on Epidemic Sequencing
WEN Bin-bin WANG Li-jia LI Yue-peng HU Xue-hua CHEN Xu-feng
(Hebei institute of industrial technology, Shijiazhuang Hebei 050091, China)
【Abstract】This:paper is now popular popular sort significant target detection algorithm based on graph analysis algorithm[1]too idealistic defects existing in the prior background, proposed a based on the outlook for the global features[2]and the background characteristics of the organic combination of query node makes more accurate, making significant detection more accurate and effective.
【Key words】The sorting; Detection; Improved method
0 引言
信息高速发展的现代社会,图像信息是主要的数据资源,海量的信息给图像的高效处理带来了巨大的挑战,人们往往只关心图像或者视频中小区域内容,那图像处理的时候就需要把人们感兴趣的区域找出来,图像显著性检测是计算机视觉领域的关键技术之一。图像显著性检测研究的主要内容是如何准确快速的提取图像中感兴趣的区域。
1 基于图的流行排序显著性算法
基于图的流行排序显著性算法(MR算法)是目前研究较多、效果较为显著的一类算法,MR 算法的过程是一个两阶段的流形排序过程,定义图模型,选取图像边界处的节点作为背景种子点,以背景种子点作为查询节点进行流行排序,构造第一阶段显著图,然后对得到的显著图自适应阈值分割后选取前景种子点,以前景种子点作为查询节点进行流行排序,构造最终显著图。可以看出,MR算法将第二阶段的种子节点是建立在第一阶段的输出显著图的基础上,最终显著图依赖于第一阶段获取的边界节点特征是否明显,当前景目标有较大部分接触到图像边界时,MR效果不佳。
2 改进的算法
本文在MR算法的基础上研究提出了一种在背景种子点筛选上的改进算法,旨在保留MR算法对大部分图像的良好实验效果,同时改进MR算法先验背景过于理想化的缺陷。由于MR算法只考虑了背景特征二没有考虑前景特征,无法得到一些参考全局对比度才能检测到的显著区域,本文的算法引入了基于全局对比度的前景特征,将前景和背景作为样本点进行排序生成显著图[3-5]
本文方法基于MR算法中的闭环图模型,将所有节点设为查询节点,相当于直接利用闭环图本身的最优相似度矩阵 A,计算每个节点与其他节点的差异和。在公式f*=(D-?鄣W)-1y中令y=|1,1,1,…,1|T以此可以得到一個显著图Sfg,该显著图即为考虑到全局特征得到的各个节点的显著值,计算公式为Sfg=A*|1,1,1,…,1|T, Sfg对应到每个像素构成的显著图就是基于前景特征的显著图Sfg用自适应阈值进行二值化,得到的被标记为显著的节点的集合就是前景特征种子节点。
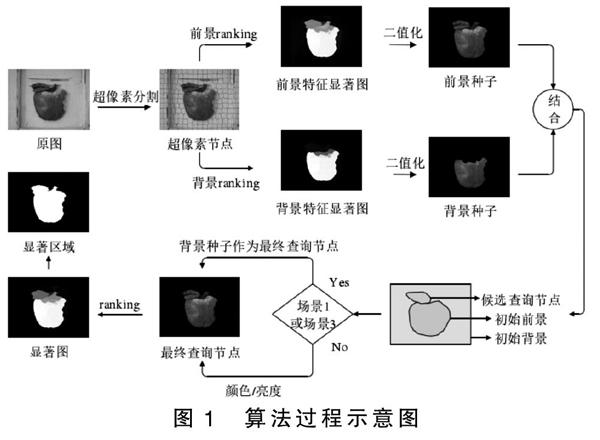
图1 算法过程示意图
算法的流程是:首先对原图像进行超像素分割,以超像素为节点构建闭环图模型[6],过流行排序构建前景和背景特征显著图,然后二值化得到前景种子和背景种子,将两类种子结合作为第二阶段的查询节点,再一次通过流形排序算法,即得到了最终的显著图。算法过程示意如图1所示
具体步骤如下:
Input:图像Image
Output:图像超像素分割节点图,图像最终的显著图
1)将图像利用SLIC的方法进行超像素分割,以每一个超像素的节点建立闭环图G,计算度矩阵D和权值矩阵W。
2)计算矩阵(D-αW)-1,将对角线元素置为0。
3)基于前景特征的流行排序:依据公式Sfg=A*|1,1,1,…,1|T,将所有节点作为查询节点进行流行排序计算,得到前景特征显著图Sfg,以自适应与之二值化后得到前景种子。
4)基于背景特征,依次采用上、下、左、右边界的结点作为样本,生成指示向量y,计算出对应边界的第一阶段显著性图,将第一阶段的显著图二值化的结果作为查询节点在进行一次流行排序计算,最后整合成显著性图像Sbq,再将其进行二值化得到背景种子。
5)将前景种子和背景种子进行结合得到最终的查询节点。
具体结合方法为:
(1)计算初始前景fgQuery种子和背景种子的交集,即两次被标记为显著区域的节点集合)初始背景bgQuery(前景种子和背景种子的非,即两次被标记为非显著区域的节点集合)候选查询节点candidate(剩余的种子点,即待判定为前景或背景的点)[7]。
(2)判断图像的前景种子和背景种子的相似性,若相似性较大则命为场景1,若前景种子和背景种子存在部分差异,则命为场景2,若前景种子和背景种子存在显著差异,则命为场景3,若符合场景1或者场景3,令最终查询节点fianl Query=背景种子,直接进行最终的计算;否则,继续下列步骤。
(3)最终查询节点初始化为初始前景mapfinal=fg Query,对于每个候选节点candidate与初始前景平均特征的欧几里得距离,最為候选节点与初始前景的相似度。
6)由fianl Query得到矩阵y,利用公式f*=(D-?鄣W)-1y计算各个节点的排序值,得到的排序值即为各个超像素的显著值。将超像素节点的显著值对应到图像中的每个像素,求得图像的显著图saliencymap。
3 结果分析及总结
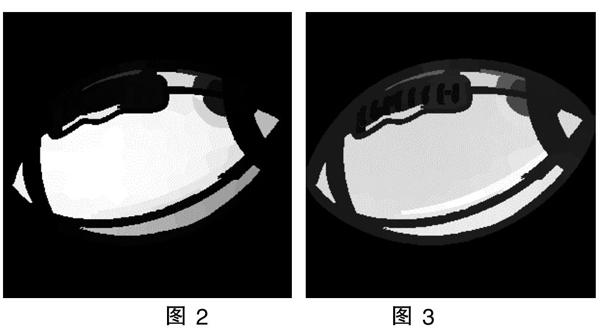
图2 图3
图2是利用经典的MR算法检测后结果,图3是改进算法后的检测结果,由图分析可以看出,改进的算法效果较为好。
文章针对现在流行的MR算法中仅使用图像四个方向边界处的节点作为查询节点的问题,提出了基于全局对比度的前景特征,并将前景特征与背景特征进行有机结合,使得查询节点更为精准,从而使显著性检测更为准确有效。
【参考文献】
[1]Yang C,Zhang L,Lu H, et al. Saliency Detection via Graph- Based Manifold Ranking[C].2013 IEEE Conference on Computer Vis ion and Pattern Recognition IEEE Computer Society, 2013:3166-3173.
[2]L.Wang, J.Xue, N.Zheng, and G.Hua. Automatic salient object extraction with contextual cue. In ICCV, 2011.1.
[3]Y. Lu, W.Zhang,H.Lu, and X.Y. Xue.Salient object detection using concavity context. In ICCV, 2011.1.
[4]M.M.Cheng,G.X.Zhang,N.J.Mitra,X.Huang,and S.M.Hu.Global contrast based salient region detection.In CVPR, 2011.1, 4,6.
[5]Y.L.Xie, H.C.Lu,and M.H.Yang. Bayesian saliency via low and mid level cues.IEEE TIP, 2013.1,6.
[6]J.Sun,H.C.Lu,and S.F.Li.Saliency detection based on integration of boundary and soft-segmentation. In ICIP,2012.1.
[7]汪梅.基于流行排序和结合前景背景特征的显著性检测[J].计算机应用,2016(2).