基于虚拟观测值的伪距差分方法研究
2019-11-12赵亚枝谷守周秘金钟刘一陈冲
赵亚枝,谷守周, 秘金钟,刘一,3,陈冲
(1.山东科技大学 测绘科学与工程学院,山东 青岛 266590;2.中国测绘科学研究院,北京 100830;3.海军工程大学 导航工程系,湖北 武汉 430000)
0 引 言
伪距差分服务是当前应用最广的实时高精度定位服务.随着高精度定位技术的发展,高精度定位需求逐渐由行业需求转为大众需求.随着用户数量增多,计算压力增大,传统伪距差分服务模式不适用大量用户并发接入服务[1-2].
当前伪距差分服务分为两种模式,播发伪距改正数模式与播发观测值模式[3].播发伪距改正数的模式目前由于尚无北斗卫星导航系统(BDS)标准格式,无法兼容BDS.播发观测值的模式需要向用户同时播发基准站的坐标信息[4],导致基准站信息泄漏,与我国现行基准站管理法规相关规定不符,不适用于大范围提供服务.传统服务模式已不能满足当前大众位置服务的需求.
针对伪距差分服务当前存在的问题,本文在服务端提出利用局域连续运行参考站系统(CORS)网数据,生成虚拟格网伪距观测值,并向用户实时播发数据.由于顾及到参考站位置对于差分信息的影响,精度与多站差分相当[5-6].基于虚拟格网伪距观测值的伪距差分方法改进了多基准站伪距差分定位方法,该方法不仅能够保留多站差分的定位精度与高可靠性、格网差分的大量用户接入的优点、兼容BDS,而且能够有效保护我国基准站信息.
1 基于虚拟格网伪距观测值伪距差分方法
虚拟格网伪距观测值是利用一定区域内星历误差、卫星钟差、电离层延迟、对流层延迟等误差具有较好的时空相关性,这些误差对这一区域内接收机的影响大体相同[7].然后将基准站影响定位的各项误差分离及分类,将各类误差按照不同的处理策略处理得到格网中心点处综合误差项,进而得到该位置虚拟观测值[8-10],向用户实时播发.
1.1 格网改正数生成
误差的分类处理是虚拟观测值生成的关键,主要误差项包括卫星钟差、地球自转引起的误差、对流层延迟误差、相对论效应、电离层延迟误差以及残余误差项[11].按照处理方案将误差分成两类,第一类包含卫星钟差、相对论效应和地球自转误差与卫星、卫星位置、站点位置相关的误差,其余误差项分为第二类.
格网改正数生成分为2个步骤:
1)各基准站伪距改正数生成;


(1)
式中:di,bi为格网中心点Gk与各基准站Bi的距离与反距离值;b为参与格网虚拟站点计算的反距离值之和;ai为Bi基准站内插格网中心点Gk所占权重.
由式(1)可知,ai满足以下条件:

(2)


(3)
1.2 虚拟伪距观测值生成
格网中心点伪距综合改正数生成后,虚拟站点坐标已知,结合广播星历可准确求出虚拟站点与卫星的卫地距、相对论效应、卫星钟差、地球自转引起的误差,将接收机钟差置零处理[13].即可恢复虚拟站点处伪距观测值.
(4)

1.3 虚拟观测值伪距差分
流动站进行单点定位粗略确定所在格网,并通过网络接收所在格网中心点的虚拟伪距观测值和站点坐标,实现伪距差分定位.

(5)
单差伪距一般表示站间一次差,站间差分可以直接消除卫星钟差的影响,当基线距离较近时对流层与电离层的影响几乎相同,所以电离层与对流层误差也几乎消除[14].单差伪距观测方程为

(6)

双差伪距表示在单差伪距的基础上进行星间差分,由式(6)可得两颗卫星的单差伪距观测方程:
(7)
式(7)中上标j、i表示不同卫星.两式相减消去接收机相关误差得到双差伪距观测方程:
(8)
在生成虚拟伪距观测值的基础上对影响虚拟观测值生成与服务的主要因素进行分析,得出伪距虚拟观测值差分定位服务最佳配置.其中主要影响因素包括,基准站间距、基线距离、虚拟站点高程选取方法[15].
2 试验分析
2.1 数据
利用湖南CORS网选取79个基准站,基准站平均间距60 km,接收机均采用Trmible R9接收机,观测环境良好.流动端采用华晨北斗CC20双模(BDS+GPS)单频手持接收机于长沙市内采集数据.
2.2 数据分析
2.2.1 基准站间距
本试验分析基准站间距对于伪距差分的影响.挑选基准站间隔为60 km、100 km、180 km;搜索范围分别设为90 km、150 km、200 km,以保证各个间距的网均能够搜索到足够的基准站;生成按经纬度划分1°×1°的格网,基线距离15 km.将三种情况下生成的虚拟伪距观测值进行实时伪距差分定位测试结果与真实坐标对比得出N、E、U方向定位残差,如图1所示.统计结果见表1.并对测试数据的N、E、U方向平面精度超过1 m、垂直精度超过1.5 m数据量与百分比进行统计,如表2所示.



图1 伪距差分定位残差序列图
表1 误差统计

站间距/kmRMS/m NEU平面三维 600.1800.1400.4680.2280.521 1000.6130.5711.4480.8381.673 1800.6620.8411.5581.0701.890

表2 超限数据统计
根据表1数据分析,可以得出基准站平均为60 km、100 km时平面与垂直方向均符合要求;基准站为180 km时平面与垂直方向均超限.从表2可以看出,基准站为60 km时垂直仅有1个数据超限,站全部历元数的0.3%;基准站为100 km、180 km时平面超限历元数占全部历元20%~25%;100 km时垂直超限历元数较60 km时显著增多,达到32.7%,180 km时达到61.46%,超过一半历元.
综上所述,基准站60 km时能达到最优的差分定位性能,能满足平面优于1 m、垂直优于1.5 m定位需求.我国基准站网建设除西北部分地区外均能满足要求,东部地区基准站平均间距在10~30 km,大部分地区均能够达到用户定位需求.
2.2.2 基线距离
由试验1的结果可知基准站平均间距60 km实时差分效果最佳,所以本试验选取平均间距为60 km的基准站网与90 km搜索范围生成格网点虚拟伪距观测值,基线距离为30 km、60 km、120 km来测试格网伪距差分的定位性能;通过变换格网中心点位置达到控制基线距离的目的.实时伪距差分残差序列如图2所示.统计结果如表3所示.
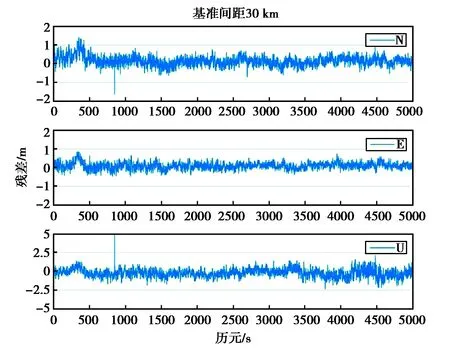

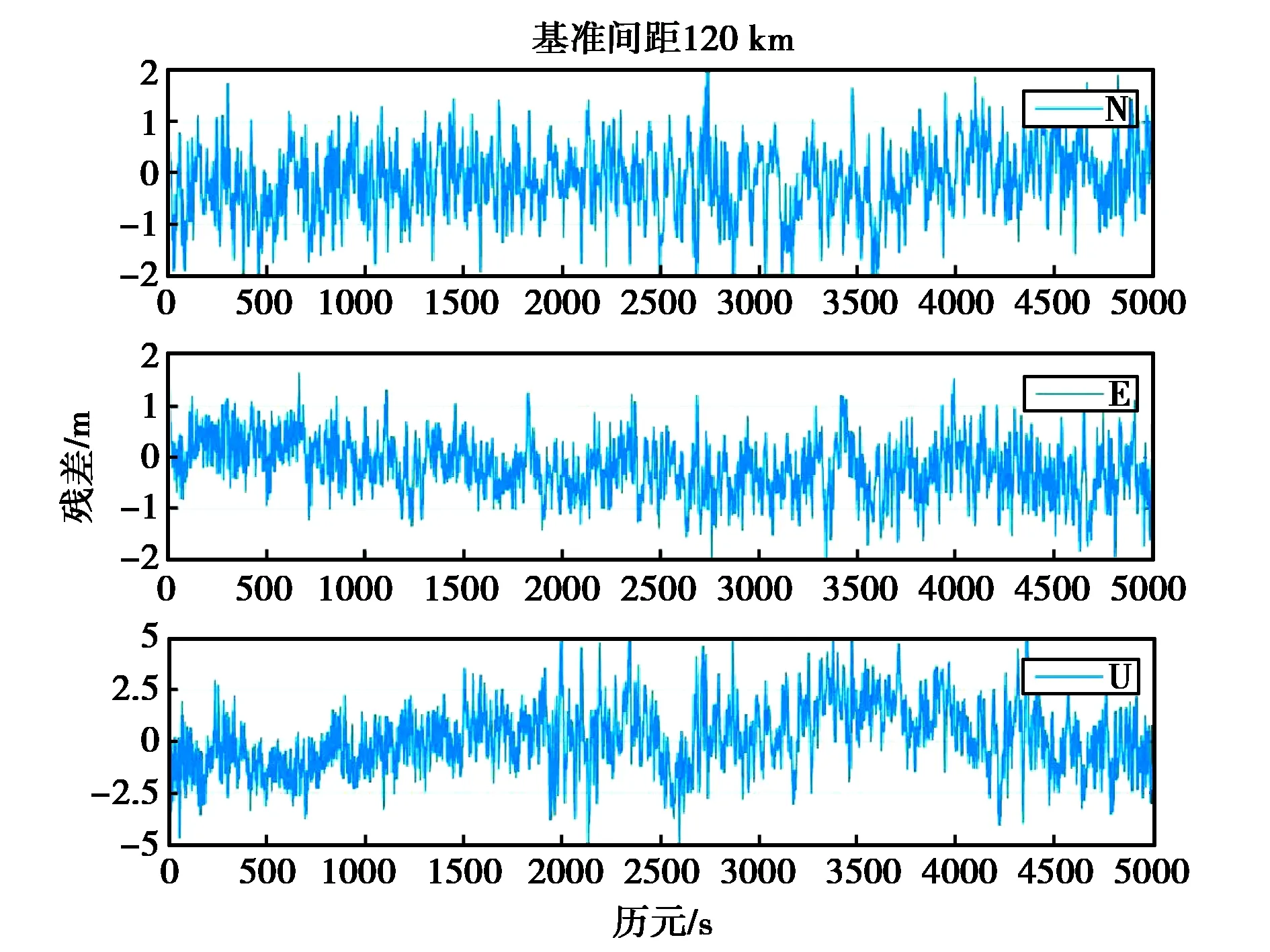
图2 伪距差分定位残差序列图
表3 误差统计

基线长度/kmRMS/m NEU平面三维 300.2900.2040.5800.3540.680 600.4990.3160.5660.5910.818 1200.7090.5951.6720.9261.911
通过表3可知基线距离为30 km、60 km时定位精度均满足平面优于1 m,垂直优于1.5 m的定位精度.基线距离为120 km时平面定位精度满足要求,垂直方向超限.垂直方向精度随基线长度增大定位精度下降明显,平面下降较平缓.说明在基线长度达到120 km的时候时空相关性下降明显.综上所述,基线距离为30 km、60 km、120 km分别对应格网划分的0.5°×0.5°、1°×1°、2°×2°格网的边缘,所以在步长为0.5°和1°均满足要求.
2.2.3 虚拟参考站高程
本试验目的在于探索虚拟参考站高程选取对于差分服务性能的影响.实验设计基准站平均间距60 km、格网划分1°×1°,服务端分别同时生成与流动站高程差为0 m、50 m、100 m的格网中心点处虚拟伪距观测值,流动端测试设备为CC20手持机,基线距离15 km.实时伪距差分残差序列如图3所示.统计结果如表4所示.



图3 伪距差分定位残差序列图
表4 误差统计

高差/mRMS/m NEU平面三维 00.1800.1400.4680.2280.521 500.2870.1940.7360.3470.814 1000.2570.4660.9730.5321.109
通过表4可以得出,虚拟站点高程与流动站高程相同时定位性能最好,随高差增大平面定位精度略有下降,垂直方向定位精度下降明显.总体定位精度还满足平面优于1 m、垂直优于1.5 m的设计精度.
综上所述,虚拟站点高程选取时要尽量与流动站高程接近,一般CORS站高程能代表格网区域内的高程,所以这里选取格网周围CORS站平均高程作为虚拟站点高程进行差分定位服务.
3 结束语
面对基准站坐标涉密不能传输、伪距改正数模式标准格式无法兼容BDS与大用户量并发服务等问题,提出了基于虚拟格网伪距观测值的伪距差分方法,从基准站间距、基线距离、虚拟参考站高程方面分析,综合考虑定位精度、可靠性等因素,在定位精度为平面优于1 m、垂直优于1.5 m的定位需求时,基准站平均间距60 km,格网划分大小为1°×1°,选取该地区平均高程作为虚拟站点高程即可满足要求.
