船体水下壁面清污工作效率研究
2019-11-11林海燕王皓
林海燕 王皓

摘 要:为了减少船舶附着物造成的燃油损耗,以及船舶清污带来的非运营时间增加,提出一种船体水下壁面清污的工作方案。通过对船舶外形的特点、工作环境、水下壁面附着物特点进行分析,对船舶清污机器人的不同工作模式进行对比研究,论证了该方案既能达到船体水下壁面清污工作的质量要求,又能提高船体水下壁面清污工作的效率,为船舶清污机器人的深入研究提供思路。
关键词:船体;水下壁面;清污;效率
中图分类号:U672 文献标志码:A 文章编号:2095-2945(2019)28-0058-02
Abstract: In order to reduce the fuel loss caused by ship attachment and the increase of non-operating time caused by ship decontamination, a working scheme for cleaning the underwater wall of ship is proposed. Based on the analysis of the characteristics of ship shape, working environment and underwater wall attachment, the different working modes of ship cleaning robot are compared. It is demonstrated that the scheme can not only meet the quality requirements of the hull underwater wall cleaning work, but also improve the efficiency of the hull underwater wall cleaning work, and provide ideas for the further research of the ship cleaning robot.
Keywords: hull; underwater wall; decontamination; efficiency
引言
船舶常年在水中航行,大量海洋生物會附着在船体上,使得船舶运输的无效负荷增加。此外,船体附着生物和铁细菌、硫酸盐还原细菌会对船体表面的防护层产生化学腐蚀作用,导致船体钢板被强烈腐蚀。为了保证船舶安全航行,延长船舶的使用寿命,船舶需要定期对船坞施行检查。但这样会存在船坞不足、修船时间长的问题,进而增加了船舶的燃油损耗和非营运时间。所以开展船体水下壁面清污效率的研究具有十分重要的现实意义。目前国内外专家在船体清刷工具和壁面机器人方面做了大量的研究工作,本文将对船体水下壁面清污的工作方式进行研究,以提高船舶水下壁面清污效率。
1 船体水下壁面清污系统工作原理
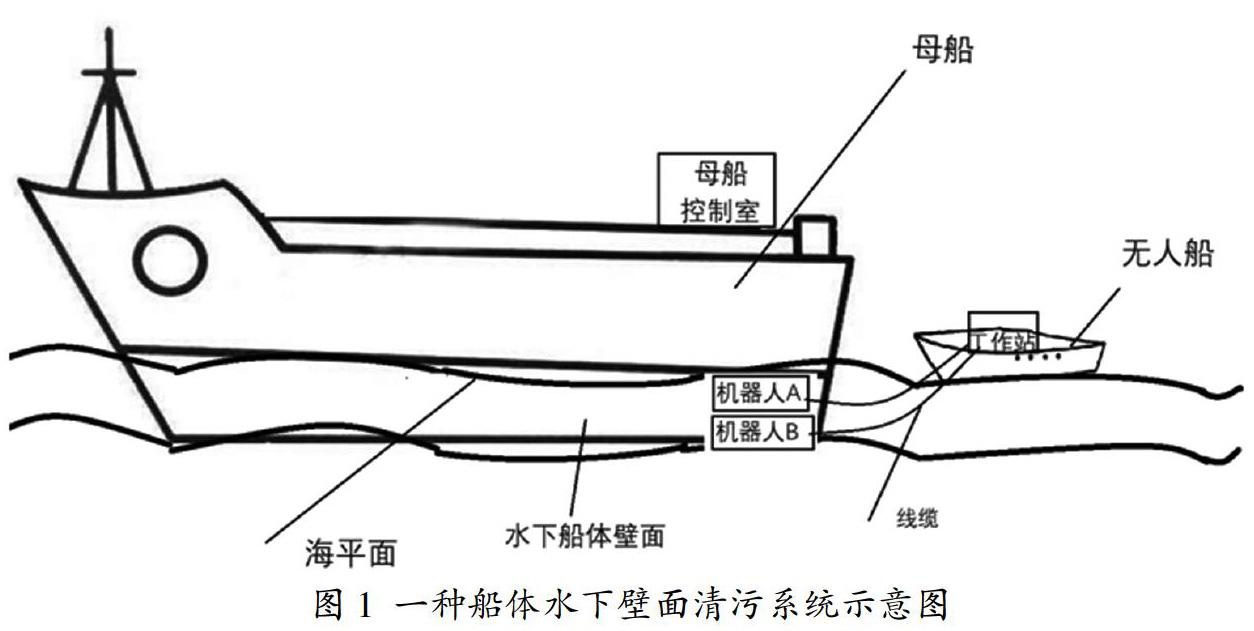
本文设计了一种船体水下壁面清污系统,示意图见图1。该清污系统由母船控制系统和无人船系统两部分组成。母船的控制台装有数据接收器、图像显示器、控制器。母船控制系统实时接收、处理和分析无人船系统所采集的数据并对无人船和机器人进行操作和控制。同时具有显示采集的实时图像和数据存储功能。无人船系统包括太阳能发电装置、无人船工作站、供电电缆、信号电缆、水下清污机器人;无人船工作站具有为水下清污机器人充电和巡检功能,与水下清污机器人进行有线通信,与母船控制系统进行无线通信的功能;水下清污机器人通过自带摄像头所获得水下船体表面的深度立体图像、被清除物面积大小和详细位置数据传给无人船工作站;无人船工作站通过对水下清污机器人传回的数据进行初步分析,判断出水下壁面附着污垢的位置、种类及附着厚度,以及合适的清污工作方式,然后将相关数据传到母船控制台;母船操作人员观察水下画面信息进一步确认清污工作方式,若操作人员确认无人船给出的判断信息,则无人船会对清污机器人发出具体的控制指令;否则操作人员直接发出具体的清污工作指令。对于需要整体清洗类型采用清污机器人并联的工作方式进行清污。对于局部清洗可以采用单独方式进行清污;对于贝壳类污垢由破坚机器人作业,前端钻头部分可以根据环境需要进行-90°~+90°旋转;而对于海藻类污垢,由切割机器人作业。通常采用先破坚后切割的工作方式。
2 水上水下清污结合对提高水下清污工作效率的作用
船舶按照用途来分,有客运船、普通货运、集装箱船、散货船、油船等,不同类型的船舶其船体具有不同的结构类型,船体外形也各不相同。但大体结构如图2所示。
船舶在大海上航行时,船体一部分在海平面以上,另外一部分在海平面以下,分界线对应的是设计水线,最容易被海水侵蚀的船体是设计水线以下壁面,即船体水下壁面部分。
海水中影响船体腐蚀的海生物可分为三类。一类是细菌和海藻类,一类是柔软的海洋生物,第三类是硬质海洋动物,如藤壶、贝类等。船舶在海水中航行,各类微有机体很快附着于船体水下壁面,进而微生物繁殖,宏观生物依附于微生物逐渐成长,船体水下壁面被海藻、软体生物、贝壳类覆盖,宏观生物死亡腐烂处微生物大量繁殖,继续附着第二代宏观生物,其中,贝壳类生物一般附着牢固,当第一代死亡之后,其外壳不易脱落,第二代则在其硬壳上继续繁衍,造成船底附着生物增厚,经过几个繁殖周期,船底附着的生物可达一定厚度。
根据附着物种类分析,船体水下壁面清污工作主要需要清除贝壳类,清除海草类,根据船体壁面保护的角度,需要进行除锈、防腐层修复。如果清除贝壳类、海藻类、打磨锈迹、防锈修复四个环节都在船坞中进行,会存在船坞不足的问题,增加船舶非运营时间,如果四个环节都在船舶停靠码头时水下进行,则打磨锈迹的铁锈会污染海水,并且在水中清除锈迹后不能进行防腐层修复工作,很快会再次产生锈迹。通过对比分析和实地调研,在水下开展贝壳类、海藻类清除工作,由于水下进行附着物清除,船舶进港停泊时间都可以让清污机器人进行附着物清除工作,时间上灵活性高,清理及时,避免船体水下壁面附着物过厚,造成的清理困难。进船坞除锈和壁面防腐修复工作时间相对减少,可以合理安排船期和船坞排期,在保证工作质量的同时,有效提高工作效率,延长船舶寿命。
3 机器视觉的应用对提高水下清污工作效率的作用
机器视觉在水下清污机器人上的应用可以使人们更加清楚地了解船舶水下部分的附着物种类和船体壁面腐蚀程度。比如,清污机器人在清除贝壳类和海草类附着物的过程中,通过机器视觉拍摄船体附着物和腐蚀情况,将获取图像传回无人船工作站,无人船工作站传回母船控制室,让管理人员了解船体不同位置附著物和腐蚀情况的差异,总结经验,进行分区管理,区分重点清污区域和非重点清污区域,确定不同的清污方式和清污时间;了解贝壳类、海藻类生物附着周期,设置合理的清污周期;了解防腐层破损情况,绘制船体腐蚀情况曲线,结合船舶航行日程安排及船坞的排期,决定进船坞开展打磨锈迹和防腐层修复工作的时间。合理利用通过机器视觉获得的图像数据,在清污时间和清污区域方面都能有的放矢的开展清污工作,避免了无效、低效清污工作,节省时间,有效提高工作效率。
4 分层并联工作模式对水下清污工作效率的影响
为了提高清污机器人的工作效率,可将船体水下壁面分为若干层,靠近水面的是上层,靠近船底的是下层,船底为底层,多台清污机器人并联工作。第一,多台清污机器人并联工作的情况,完成指定的清污工作,可以成倍的缩短清污时间。第二,由于船体上宽下窄,船体表面附着物造成的船壁凸凹不平,清污机器人上下往复越障行走开展清污工作,需要不断调整位姿来进避免倾覆,而按照上层、下层、底层来分,多个清污机器人同时在各自水平层绕船体一周或在船底开展清污工作,位姿调整幅度和频率明显减少,机器人倾覆的可能性大大减少。第三,在船壁的不同水平层海洋污染物附着情况不同,清污方式可能不同,可根据本层附着物特点设定通过破坚方式清除贝壳类污染物的时间和通过切割方式清除海藻类污染物的时间。以上三点均可在不同程度上提高清污机器人的工作效率。
5 结束语
我国近年来在水下机器人领域取得了举世瞩目的成绩,为水下机器人技术在各行各业应用奠定了坚实基础。但因为船舶水下清污需要考虑船舶材料、形状,附着物特点及环保回收等因素,还要结实际需要对水下清污机器人进行针对性的研究开发,在清污机器人清污方式和工作效率方面有所改进。目前,经走访调研多家船厂,结果表明水上水下清污结合、机器视觉的应用、清污机器人分层并联工作方式,均能有效提高船体水下壁面清污工作效率。
参考文献:
[1]陈彦臻,胡以怀.船体表面附着物清洗技术的研究及应用[J].表面技术,2017,46(10):60-71.
[2]章炜.机器视觉技术发展及其工业应用[J].红外,2006,27(2):11-17.
[3]李定川.机器视觉原理解析及其应用实例[J].机器视觉,2017:73-75.