真空机械手精确转运系统设计研究
2019-11-11王国轩聂晓峰杜江涛朱洪超
王国轩 聂晓峰 杜江涛 朱洪超

摘 要:当前,自动化已经广泛应用于工业生产中。文章中真空机械手采用PLC脉冲输出信号控制步进电机沿纵向与横向运动,通过发送脉冲的个数实现精确定位的功能;利用真空吸盘代替机械手手爪,实现了对物料的吸取与释放。并研究完成了对机械手硬件系统、软件系统和触摸屏画面的设计。实践证明,该系统操作方便、运行平稳,能够对物料进行安全精确的转运,使用效果良好。
关键词:真空机械手;可编程逻辑控制器;触摸屏
中图分类号:TP241.3 文献标识码:A 文章编号:2095-2945(2019)28-0007-05
Abstract: At present, automation has been widely used in industrial production. In this paper, the programmable logic controller (PLC) pulse output signal is used to control the longitudinal and transverse motion of the stepper motor in the vacuum manipulator, and the accurate positioning function is realized by sending the number of pulses. The vacuum sucker is used to replace the manipulator claw to realize the absorption and release of the material. The hardware system, software system and touch screen of the manipulator are designed. The practice shows that the system has the advantages of convenient operation, smooth operation, safe and accurate transfer of materials, and good application effect.
Keywords: vacuum manipulator; programmable logic controller (PLC); touch screen
引言
当前,传统的工业生产正迅速向人工智能生产转变,设计能大幅提高生产效率并保证产品质量的智能设备是人们的不懈追求。在一些恶劣的工作环境、高强度流水车间等利用机械手来实现生产劳动可以大幅度节约人力物力,提高生产作业的安全性;并且还可以根据生产需求的变化,便利地改变作业程序。这样就在可以实现工作目的的同时,大大提高生产效率,因此具有很大的研究价值[1-2]。为此提出一种利用可编程逻辑控制器(PLC)来操控机械手的机械手爪、步进电机以及传感器等做出各种指定且复杂多变的动作,来实现工业生产的精确转运系统,这是当前形势下顺应时代的产物。
1 转运系统作业方案
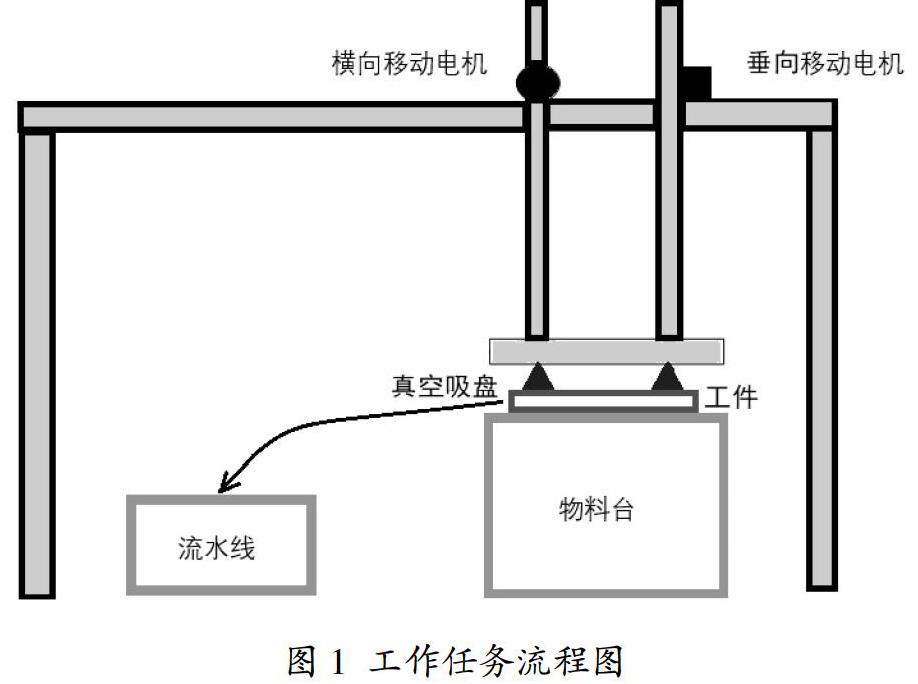
1.1 工作任务及流程
本项目设计的是实际工业生产中需要用到的真空机械手转运系统,工作任务及流程如图1所示。当物料进入到物料台上时,物料台上的光电传感器立即产生作用,给机械手一个信号,垂向移动电机随之启动,带动机械手下降;当其下降到设定的下方极限位置时,行程开关传感器检测到设定位置时,给机械手一个信号,纵向电机立即停止;然后真空泵得电启动,通过真空吸盘将物料吸起;然后垂向移动电机启动,带动机械手向上移动,当到达设定位置时,垂向移动电机制动;接着横向移动电机立即开始向左移动,当机械手移动到设定的左极限位置,也就是流水线起始端正上方,这时横向移动电机接收到行程开关传感器的信号立即制动;垂向移動电机重新启动,带动真空机械手向下移动,移动到位之后真空泵失电,将物料放到流水线指定位置;最后机械手原路返回到物料台上方。
1.2 控制模式选择
(1)手动模式:当控制台启动时,机械手首先会自动回到物料台上方,在触摸屏界面中触摸手动按钮,然后触摸上升或者下降按钮时,机械手就立即启动,随之上升或者下降。再次触摸手动按钮时,移动电机立即制动,机械手不再移动。
(2)自动模式:在触摸屏界面中触摸自动按钮时,控制系统立即进入到自动运行模式,当光电传感器检测到物料台上有物料时,机械手开始做匀速运动,机械手不论此时位于哪个位置,都将按照设定的程序移动到物料台上方,通过真空吸盘将物料吸起。机械手带着物料开始向上移动时,当接近开关检测到上极限位置,垂向移动电机制动,横向移动电机立即启动带着机械手向左运动,当接近开关检测到左方设定的极限位置时,横向移动电机停止,垂向移动电机再次运动,带着机械手向下方移动,当接近开关检测到下极限位置时,机械手立即停止移动,真空吸盘将物料放在流水线指定区域,然后机械手原路返回,循环往复。
(3)停止模式:正常当机械手处于自动运行模式时,在触摸屏中触摸启动按钮,机械手就会有条不紊的运行;当需要停止时,触摸停止按钮,机械手不管此时位于何处,机械手都将回到初始位置,然后停止运功。当设备发出警报声或者在生产中突发事故时,立即触摸急停按钮,机械手立即响应,停止运动。
2 系统硬件设计
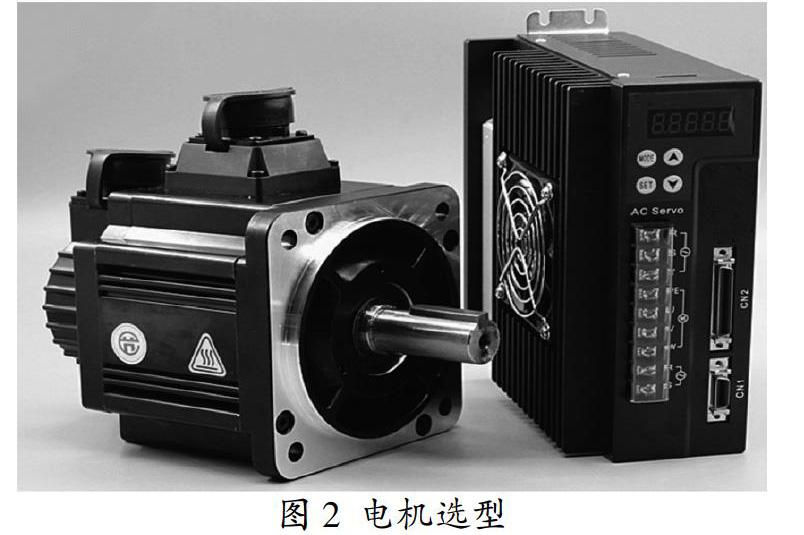
2.1 电机选型
基于前述作业方案,对于此项目用到的垂向移动电机与横向移动电机两个电机,选择的是北京时代超群电器科技有限公司生产的伺服电机,其型号为130AEA38025-SH3,如图2所示。此型号电机采用铜芯工艺,铜芯电机在工作过程中发热更少且更加节能;外壳采用铸铁密封构造,防护等级高;由于铸铁机型重量大,运行更加稳定耐用;采用高分子树脂绝缘技术加强绝缘性能,从而保障安全;转子采用铸铝特殊槽压制造,启动转矩大,惯性小,节省启动和停止的时间;振动小,噪音低,抗电冲击能力强,能在一些极端环境中持久工作[3]。
2.1.1 垂向移动电机控制
垂向电机通过伺服变频器能接收控制系统给定的上移或者下移的信号使机械手向上或者向下移动,垂向移动电机的控制图如图3所示,变频器选用的是INV ABB 2.2kW型号。
2.1.2 横向移动电机控制
横移电机通过伺服变频器能接收控制系统给定的左移或者右移的信号使机械手向左或者向右移动,横向移动电机的控制图如图4所示,变频器选用的是INV ABB 1.5kW型号。
2.1.3 真空发生器控制
利用真空泵控制真空吸盘吸起物料,在此基础上,首先需要确定真空发生器的产生的压力能否使得真空吸盘吸住物体,借助气压传感器能到达目的。气压传感器选用江苏联测仪表有限公司的扩散硅压力变送传感器,此传感器能进行水压、液压和气压测量,测试精准,性能稳定[4]。气压传感器结构、接线图如图5、6所示,真空发生器的控制电路如图7所示。
2.2 传感器选型
2.2.1 光电传感器
光电传感器选用的是大伟电气有限公司的红外线感应光电开关E3F-DS30C4接近漫反射式传感器,采用ABS塑料外壳螺旋设计,内置进口抗干扰芯片,灵敏度高,反应迅速。同时使用LED灯增加使用寿命,检测距离在30CM以内[5]。如图8所示,光电传感器的功能是检测物料台是否存在物料,当物料台上有物料被检测到时,就会给机械手一个输入信号,机械手开始工作[6]。其电路原理图如图9所示。
2.2.2 接近开关传感器
接近开关传感器选用的是深圳沪工自动化有限公司生产的沪工电感式接近开关,型号LJ18A3-8-Z/BX,直流三线常开,如图10所示,可以检测8mm范围物体。接近开关的作用是避免与被检测物体产生直接接触而损坏机械手和物料[7]。项目中接近开关的功能是检测真空吸盘与物料之间或者机械手与设定的极限位置之间的距离。当没有物体挡住接近开关时,它的开关一直处于闭合状态,当有物体挡住接近开关时,开关断开。能在有水或者其他喷溅液体的环境中运行,反应速度快,安装方便[8]。接近开关的输出电路如图11所示。
2.3 PLC选型
本项目可编程逻辑控制器(PLC)选用的是德国西门子生产的S7-200PLC。西门子公司经历了一百七十多年的发展,其生产的PLC已经非常成熟[9]。
2.3.1 I/O分配表
根据项目要求,配置了如下表中的输入点和输出点,其中具体输入点分配和具体的输出点分配如表1所示。
2.3.2 系统电气框图
根据表1中的输入点和输出点的具体分配,设置了系统电气框图如图12所示。下半部分为输入开关量,电源为24V;上半部分为输出开关量,供电电源可以是直流24V、交流220V等。
2.3.3 系统主电路及控制电路设计
根据上述所需要PLC电源、两个移动电机以及真空泵,设计了如下的系统主电路的电气原理图,如图13所示。西门子PLC的电源和开关电源均通过变压器连接到母线上;为了防止过载,将两个移动电机和真空泵通过过载保护器后再连接到母线上,使系统更加安全稳定的运行。
2.4 触摸屏选型
触摸屏组态界面也常称为人机界面,简称HMI。它是用户与操作系统之间沟通的桥梁,是计算机系统的重要组成部分,现在广泛应用于手机、社区服务、银行自助服务和车载显示等各类场景[10]。人机界面实现工业系统的“语言”与人类语言的转换,可以分为信息输入与信息输出两种,信息输入指的是由操作者对仪器下达的“命令”,如电灯和门窗的打开与闭合、电路的通断等;信息输出是由机设备给用户传达的信息,例如故障、报警、声音、灯光等。一个良好的触摸屏可以使操作过程变得更加简洁,在增加设备使用年限前提下,能使生产设备在使用过程中发挥出更大作用[11]。
2.4.1 监控界面
系统的监控界面中显示日期、截止目前工作数量、吸料延时和故障报警等栏目,如图14所示。
2.4.2 保护时间设置
系统的保护时间设置界面主要包含以下几点:(1)機械手回原点限时(S);(2)机械手升降限时(S);(3)机械手侧移限时(S);(4)返回触摸屏主界面。
在机械手工作中过程会出现不可预知的危险,设置保护时间是为了防止控制系统出现故障。这样在机械手工作过程中能迅速关闭系统,以防止出现机械手和人体碰撞等重大的安全事故以及经济损失,系统参数保护界面如图15所示。
2.4.3 系统报警界面
系统的故障报警界面中主要包含报警显示与报警复位两部分,如图16所示。在进行故障复位之前,操作人员应首先查明故障原因,并及时排除故障,然后才可以进行报警复位。
3 系统软件设计
3.1 SFC顺序功能图
搬运物料机械手在自动工作模式下的SFC顺序功能如图17所示,根据顺序功能图,结合输入输出点的具体分配,就可以编写控制程序实现控制功能。
3.2 自动运行程序
在生产过程中,通常情况下,机械手都处于自动运行模式。为实现顺序控制功能,在PLC中通常采用顺序控制继电器(SCR)指令。顺序控制程序被分为若干个SCR段,一个SCR段对应于顺序功能图中的一步。当选择自动运行模式时,启用SCR指令S2.0,机械手开始向下运动;机械手运动到下限位时,则自动转动到下一个工位;机械手向右运动到达右极限位置时,则重新启动状态S2.0,机械手进入循环运行状态,以此实现工业的批量生产。在机械手自动运行过程中无论机械手此时位于何种状态,只要按下复位按钮,机械手都会自动复位,回到状态S1.0。自动运行程序如图18所示。
3.3 报警
控制系统的运行安全性极其重要,因此转运系统需要具备一个有效可靠的警报安全系统。通过设置保护时间,防止行程开关或者限位开关失灵时,机械手无休止移动,甚至与生产物料或者机械台发生碰撞,威胁人身安全。因此机械手通过吸盘吸取物料时,首先需要通过光电传感器I1.5检测物料台上是否有物料。如没有物料,线圈Q0.5发出警报,提醒工作人员在物料台上放入物料。当机械手在移动过程中发生故障报警时,机械手自动停止运行,报警灯常亮。此时需操作人员进入触摸屏运行报警界面人工复位,切断控制系统的电源并且将故障排除后,才能再次恢复控制系统。
4 结论
本真空机械手精确转运项目结合电气控制技术、运动控制技术、传感器与检测技术以及PLC应用技术,实现了把工件从物料台精准转运到流水线的功能。项目在满足稳定性、安全性和精度的基础上,极大地提高了生产流水线的作业效能。本文中真空机械手采用PLC脉冲输出信号控制步进电机沿纵向与横向运动,通过发送脉冲的个数实现精确定位的功能;利用真空吸盘代替机械手手爪,实现了对物料的吸取与释放。并研究完成了对机械手硬件系统、软件系统和触摸屏画面的设计。实践证明,该系统操作方便、运行平稳,能够对物料进行安全精确的转运,使用效果良好。
文章主要完成了以下几个方面的成果:(1)对完成精确转运目标功能所需要的硬件包括伺服电机、光电传感器、接近开关、气压传感器及真空泵等进行选型,并加以分析整合。(2)对所需的控制器PLC进行选型、硬件配置和软件编程,从而实现对各个运行组件的控制,尤其是对伺服电机的精准步进控制。(3)通过利用真空吸盘代替机械手手爪,对机械手硬件系统、软件系统和触摸屏界面的设计,实现了对工件吸取与释放的柔性定位控制。
参考文献:
[1]赵春生.可编程序控制器应用技术[M].河北:人民邮电出版社,2013:168-180.
[2]朱相磊,冯泽虎.电机与电气控制技术[M].北京:高等教育出版社,2014:92-98.
[3]陈恳,杨向东,刘莉.机器人技术应用[M].北京:清华大学出版社,2016:106-111.
[4]陆祥生,杨秀莲.机械手理论及应用[M].北京:中国铁道出版社,2015:40-63.
[5]杨文生,沈兆奎,王宝中.液压与气压传动[M].北京:电子工业出版社,2017:224-264.
[6]李超.气动通用上下料機械手的研究与开发[D].陕西:陕西科技大学,2013:11-16.
[7]吉顺平,孙承志,路明.西门子PLC与工业网络技术[M].北京:机械工业出版社,2017:1-6.
[8]齐进凯.气动机械手的结构设计分析及控制的研究[D].上海:东华大学,2016:7-14.
[9]张州,刘广瑞.基于PLC控制的气动机械手系统[J].机电产品开发与创新,2014,16(3):18-25.
[10]李桂莉.物料抓取机械手结构与控制系统研究[D].山东:山东科技大学,2002:17-29.
[11]Wu HB, Peng AQ, He SM. Robot Safe Motion Planning Based on Minimized Danger Index[J]. Journal of Mechanical Engineerin, 2015,51(9):18-27.