永磁同步电机自适应模糊滑模鲁棒无源控制
2019-11-04张懿韦汉培魏海峰储建华彭艳
张懿 韦汉培 魏海峰 储建华 彭艳
摘要:针对传统永磁同步电机滑模控制存在的抖振以及系统鲁棒性差问题,提出基于自适应模糊滑模软切换的永磁同步电机鲁棒无源控制方法。控制系统电流内环通过设计鲁棒无源控制器,得到dq旋转坐标系下的电压给定,有效提高电流预测控制的鲁棒性。转速外环设计模糊滑模软切换控制器,利用双曲正切函数代替符号函数,实现软切换连续控制。采用自适应模糊控制法估计集成不确定边界,有效削弱滑模抖振。实验对比传统滑模控制与新型控制方法,其结果验证了新型控制方法在抖振以及抗扰动方面的有效性和实用性。
关键词:永磁同步电机;自适应模糊滑模;无源控制;滑模控制;鲁棒性
DOI:10.15938/j.emc.2019.09.013
中图分类号:TM 301
文献标志码:A
文章编号:1007-449X(2019)09-0101-07
Adaptive fuzzy sliding mode robust passive control of permanent magnet synchronous motor
ZHANG Yi1,2,WEI Han pei1,2,WEI Hai feng1,2,CHU Jian hua2,PENG Yan3
(1.Institute of Electronics and Information,Jiangsu University of Science and Technology, Zhenjiang 212000,China;
2.Jiangsu Kai Xuan Intelligent Technology Co., Ltd, Suzhou 215000, China;
3.School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200444,China)
Abstract:
Traditional sliding mode control(SMC)of permanent magnet synchronous motor (PMSM) has buffeting problem, and its robustness is poor. In view of this problem, a robust passive control method for PMSM based on adaptive fuzzy sliding mode soft switching was proposed. Through the design of robust passive controller, the internal current loop of the control system was given in the voltage under dq rotating coordinate system, then the current predictive control robustness was improved effectively. In out speed loop, fuzzy sliding mode soft switching controller was designed, and the hyperbolic tangent function was used instead of symbolic function, then the soft switching continuous control was achieved. Adaptive fuzzy control method was used to estimate the uncertain boundary, and the sliding mode buffeting was reduced effectively. Compared with the traditional SMC and the new control method, the experimental results verify the effectiveness and practicability of the new control method in buffeting and perturbation.
Keywords:permanent magnet synchronous motor; adaptive fuzzy sliding mode;passive control; sliding mode control;robustness
0引言
永磁同步电机具有结构简单、效率高、功率密度高等固有优点,在电动汽车、风力发电、机器人等各种工业领域中得到了广泛的应用。永磁同步电机的控制系统通常采用磁场定向控制,该控制系统结构为一个具有内电流环和外转速环的串级控制结构,传统的PI控制技术由于其实现简单,在内电流环和外转速环中仍然较受欢迎。然而,实际的永磁同步电机系统中存在着大量的内部或外部干扰和不确定性,如未建模动力学、参数变化、摩擦力和负载干扰。传统的线性控制方法,如PI控制,难以取得较好的控制效果。
为此,在具有内外扰动和不确定性的永磁同步电机系统中,多种非线性控制方法被采用来提高系统的控制性能,如鲁棒控制、滑模控制、无源控制、反步控制等。在这些非线性控制方法中,滑模控制方法以其对内部参数摄动和外部干扰的鲁棒性而闻名,其可保证在参数或模型不确定性的情况下保持良好的跟踪性能。文獻针对永磁同步电机的速度环控制,提出了一种基于新型趋近律的滑模控制方法,减小了系统的抖振,同时设计了一种滑模观测器来估计系统的扰动,提高了系统的鲁棒性。文献将滑模控制应用于永磁同步电机的电流环控制,以实现精确的电流跟踪性能。文献设计了一种滑模观测器来估计永磁同步电机电流控制的参数变化和模型不确定性。众所周知,抖振是滑模控制的主要缺点。为了削弱这种现象,众多文献采用边界层积分滑模控制技术对永磁同步电机进行速度控制。随着滑模控制理论的发展,文献提出了一种末端滑模速度控制器,通过选择合适的趋近律,将非线性项引入滑模控制中,有效削弱了系统抖振,提高了系统收敛速度。但是,设计的电机控制器首先采用串级控制结构,与内部电流回路相比,外部速度回路具有相对较慢的瞬态响应。文献提出了一种新的指数趋近律来设计速度和电流控制器。为了抑制系统抖振,系统变量被应用于该趋近律。然而,在上述趋近律中,由于滑模面函数的变化,使得不连续增益迅速减小,从而降低了滑模面附近控制器的鲁棒性,同时也增大了系统收敛时间。
为有效削弱传统滑模控制存在的固有抖振,以及增强控制系统鲁棒性,给出一种基于自适应模糊滑模软切换的永磁同步电机鲁棒无源控制方法。电流内环通过设计鲁棒无源控制器,提高电流预测控制的鲁棒性。转速外环设计模糊滑模软切换控制器,有效削弱滑模抖振。实验结果验证了新型控制方法在抖振及抗扰动方面的有效性。
1鲁棒无源控制器设计
隐极式永磁同步电机在d-q旋转坐标系下的数学模型为
dψddt dψqdt=-rsLdωr -ωr-rsLqψd ψq+ud+ψfLdrs uq,
JPndωrdt=Pn(ψdiq-ψqid)-BPnωr-TL。(1)
式中:ψd、ψq为电机定子磁链在d、q轴上的分量;ud、uq和id、iq为电机定子电压、电流在d、q轴上的分量;ωr为电机转子电角速度;ψf为电机转子给定磁链;Pn为极对数;rs为电机定子电阻;Ld、Lq为电机定子d、q轴电感。对于隐极式(表贴式)转子永磁同步电机而言,由于转子给定磁场气隙均匀,定子绕组电感值与转子位置无关,定子绕组电感在d、q轴上的分量相同,即Ld=Lq=L,TL為电机负载转矩,B、J为电机输出轴摩擦阻力系数和转动惯量。令
D=diagLLJP2n,
Dx=ψd-ψfψqJP2nωrT=
D[idiqωr]T,
u=[uduq]T,
y=[idiq]T。(2)
则系统状态方程可表示为
Dx·=-rs0ψq 0-rs-ψd -ψqψd-BP2nid iq ωr+
10 01 00ud uq+0 0 -1PnTL,
y=[idiq]T。(3)
根据式(2)和式(3),将式(1)永磁同步电机dq旋转坐标系下的数学模型推导出无源控制模型为
Dx·=[J(x)-R(x)]x+g(x)u+ζ,
y=gT(x)x。(4)
式中:J(x)=00ψq 00-ψd -ψqψd-BP2n,u=[uduq]T,g(x)=10 01 00,ζ=0 0 -1PnTL,R(x)=rs00 0rs0 000,x=[idiqωr]T。
并且J(x)为反对称矩阵,J(x)=-JT(x),其反映了该系统内部的互联结构。R(x)为半正定对称矩阵,其反映了端口上的附加阻性结构。
定义状态误差向量E=x-x*,其中x*为系统期望向量,即给定向量值;x代表实际向量。将状态误差向量E带入式(4)无源控制模型,得到系统状态误差模型为
DE·-[J(x)-R(x)]E=-Dx·+[J(x)-R(x)]x*+g(x)u+ζ。(5)
取误差能量函数为
HE=12ETDE。(6)
对其进行求导,得到
H·E=-ETRE+ETφ。(7)
式中φ=-Dx·*+[J(x)-R(x)]x*+g(x)u+ζ。
为保证系统快速的动态性能,向其注入阻尼,加速能量耗散,令φ=-RaE。式(7)变换为
H·E=-ET(R+Ra)E。(8)
式中:Ra=diag{Ra1,Ra2,Ra3}为正定对角矩阵,当系统存在扰动时,误差状态方程表示为
DE·-[J(x)-R(x)]E=-Dx·*+[J(x)-R(x)]x*+g(x)u+ζ+ζ。(9)
对HE沿式(9)误差轨迹求导得
H·E=-ETRE+ETφ+ETξ。(10)
为抑制扰动误差,设计φ=-RaE+χ,则
H·E=-ET(R+Ra)E+ET(χ+ξ)。(11)
式中:χ=[χ1χ2],选择合理的χ值,满足ET(χ+ξ)≤0,则H·E<0,误差渐近收敛于零。根据φ=-RaE+χ求得鲁棒无源控制器的输出dq轴给定电压为
ud=-ψdω*r-Ra1id+χ1,
uq=(L+rs)i*q-Ra2(iq-i*q)+ψdω*r+χ2。(12)
2自适应模糊滑模控制器设计
考虑不同工况下的电机参数摄动,永磁同步电机运动方程为
ω·r+(a+a)ωr+(d+d)=(b+b)iq。(13)
式中:a=BJ,b=P2nJψf,d=PnJTL,a,b以及c为电机参数摄动量。
定义电机转速跟踪误差e(t)=ωr(t)-ω*r(t),其中ωr(t)为永磁同步电机实际转速,ω*r(t)为给定电机转速。由此得到动态方程为
e·(t)=-ae(t)+w(t)+f(t)。(14)
式中:w(t)=biq-aω*r(t)-d-ω·*r(t),f(t)=-aω^r(t)-d+biq。
为有效减小稳态误差,选择以转速跟踪误差e为自变量的积分型滑模面为
s=e+k∫10e(τ)dτ。(15)
对式(15)求导得
s·=e·+ke=-ae(t)+w(t)+f(t)+ke(t)。(16)
令 s·=0,f(t)=0,得到滑模等效控制ueq表达式为
ueq=1b[(a-k)e(t)+aω*r(t)+d+ω·*r(t)]。(17)
为有效增强系统抗参数摄动以及外部负载扰动的鲁棒性,进一步改善抖振问题,采用双曲正切函数软切换控制器
ubc=-htanh(s)。(18)
控制器输出(q轴电流给定)为
u=i*q=ueq+ubc。(19)
定义Lyapunov函数为
v=12s2。(20)
对其求导得
v·=ss·=s[-ae(t)+w(t)+f(t)+ke(t)]=
s[-bhtanh(s)+f(t)]=
-bh|s|+f(t)s≤-|s|(bh-|f(t)|)。(21)
选取合适的双曲正切函数软切换控制器增益h,满足bh>|f(t)|,则v·<0,系统稳定。
h参数的选取使用模糊推理法,将模糊控制器的输入量s、s·和输出量h进行归一模糊化,记为s~、s~·和h~。其论域规划为和。取s~和s·模糊语言值为{N(负),Z(零),P(正)},h模糊语言值为PS(正小),PM(正中),PB(正大)}。设计隶属度函数为高斯型隶属函数,采用Mamdani模糊推理,模糊控制规则设计为表1所示。
使用重心法对模糊输出h进行反模糊计算
h=∑Ni=1piμi(s~)μi(s~·)∑Ni=1μi(s~)μi(s~·)=pTw(s)。(22)
式中:w(s)=[w1(s)w2(s)…wn(s)]T,
p=[p1,p2…pn]T,
wi(s)=μi(s~)μi(s~·)∑Ni=1μi(s~)μi(s~·)。
假設h*为h的最优值选取,采用自适应律p·=βb|s|w来调节h*值,系统渐近稳定。
证明:
设计自适应模糊滑模控制律为
u=1b[(a-k)e(t)+aω*r(t)+
d+ω·*r(t)-htanh(s)]。(23)
为取得最小控制,存在参数h^满足滑模条件以及ε=h^-h*,ε取表1正小数。h^可表示为h^=p^Tw,其中,p^为取得最小滑模控制的最优矢量。
定义参数矢量误差为
p~=p-p^。(24)
构造Lyapunov函数为
v=12s2+12βp~Tp~。(25)
对其求导得到
v·=ss·+1βp~Tp~·=
s[-bhtanh(s)+f(t)]+1βp~Tp~·≤
-|s|(bh-|f(t)|)+1βp~Tp~·=
-b|s|h*+ε-1b|f(t)|-
b|s|(h-h^)+1βp~Tp·=
-b|s|h*+ε-1b|f(t)|+
1βp~T(p·-βb|s|w)。(26)
考虑到h*为达到滑模条件的最优值,自适应律选为p·=βb|s|w,上式变为v·=-|s|(bh^-|f(t)|)<0,系统渐近稳定。
综上所述,基于自适应模糊滑模软切换的永磁同步电机鲁棒无源控制系统原理框图如图1所示。电流内环通过设计鲁棒无源控制器,提高电流预测控制的鲁棒性。转速外环设计自适应模糊滑模软切换控制器,有效削弱滑模抖振。
图1基于自适应模糊滑模软切换的永磁同步 电机鲁棒无源控制系统原理框图
Fig.1Block diagram of robust passive control system of PMSM based on adaptive fuzzy sliding mode soft switching
3实验验证与分析
在永磁同步电机交流调速实验平台上,对本文提出的基于自适应模糊滑模软切换永磁同步电机鲁棒无源控制方法进行了相应的验证,实验平台如图2所示。
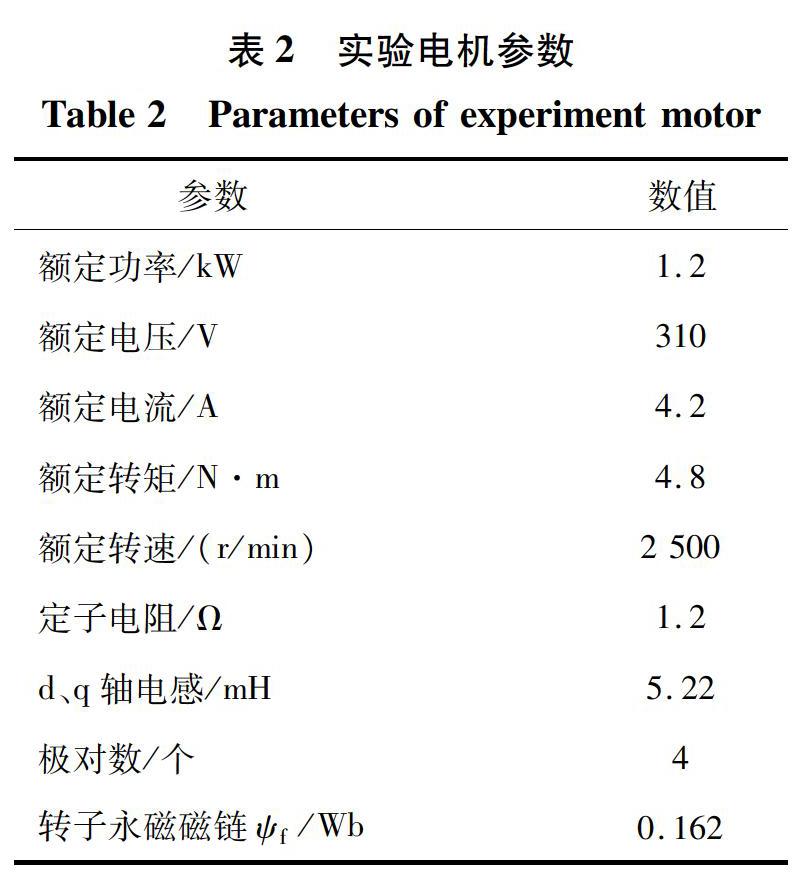
相应地,实验电机参数如表2所示。
实验过程选取给定转速突变、负载扰动以及转速正弦变化三种典型工况进行实验研究。另外,为更为直观地体现新型无源控制方法的优势所在,该实验将新型控制方法与传统滑模控制方法进行对比,并且传统滑模控制方法转速外环采用传统滑模控制,该滑模控制选取补偿项ubc=ksgn(s),对比新型软切换控制;内环电流采用传统PI控制,对比新型鲁棒无源控制。
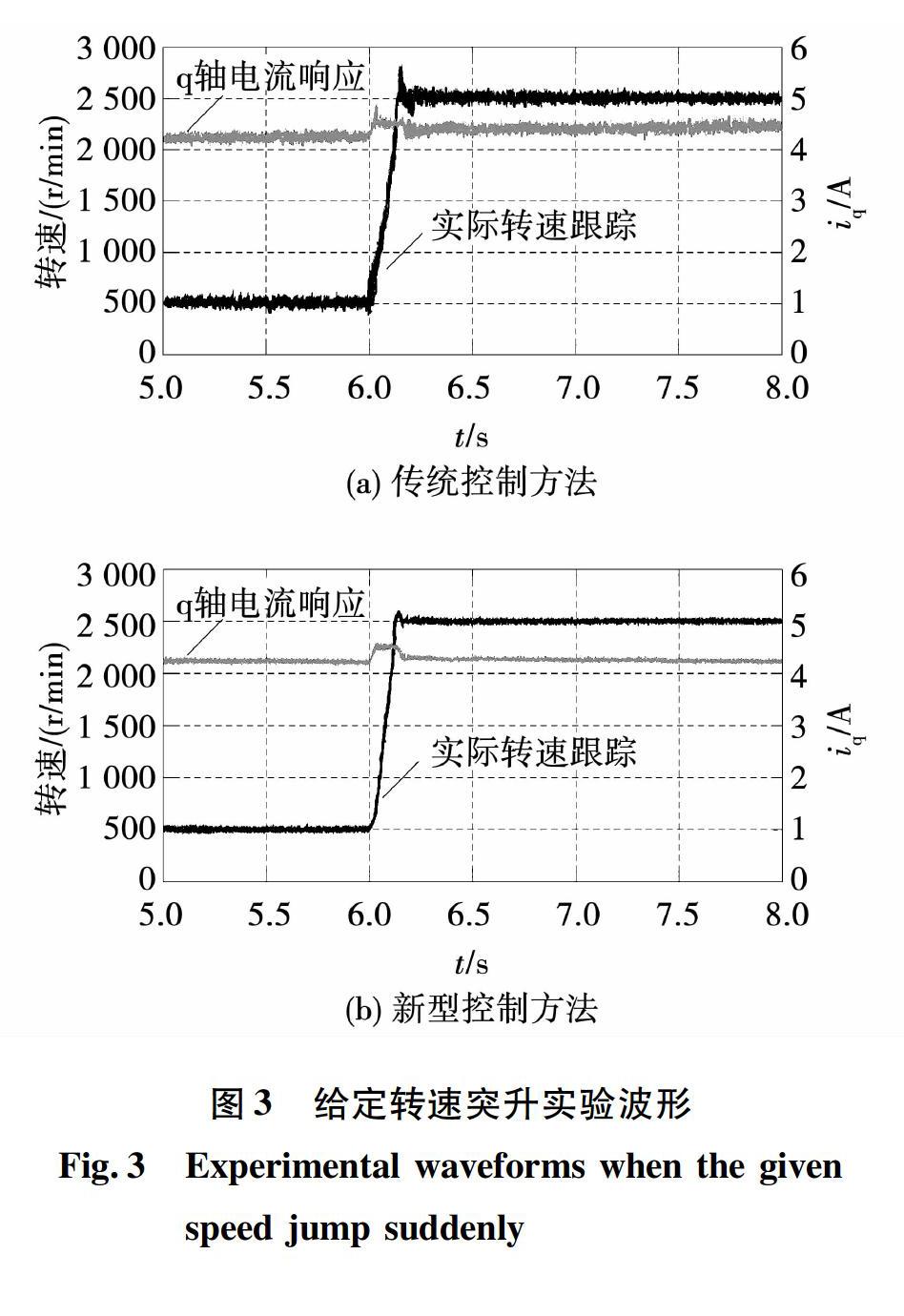
电机运行过程中,考虑给定转速突变。图3为电机处于额定负载转矩、给定转速突升工况下的实际转速跟踪以及q轴电流响应波形,其中图3(a)为传统滑模控制对应的响应波形,图3(b)为新型控制方法对应的响应波形。实验过程中,电机稳定运行于500 r/min,在6 s时刻,给定转速由500 r/min突变至额定转速值,对比图3(a)和图3(b),在转速稳态过程中,传统控制方法下的电机实际转速值以及q轴电流值抖振较大,毛刺较为严重,而新型控制方法下的电机转速值和电流值较为平稳,无明显毛刺,自适应模糊滑模控制的抗抖振优势得以发挥;在给定转速突升过程中,图3(a)传统控制方法下的实际转速值存在约250 r/min的超调量,q轴电流值在该过程中上升,同样存在0.3 A左右的超调量。对比图3(b)新型控制方法,在给定转速突升过程中,电机实际转速上升较为平滑,仅存在约50 r/min的超调量,并且q轴电流值近乎无超调,鲁棒无源控制优势得以发挥。
电机运行过程中,考虑给定负载转矩的突变。图4为电机处于额定转速、突加额定负载转矩工况下的实际转速跟踪以及q轴电流响应波形,其中图4(a)为传统滑模控制对应的响应波形,图4(b)为新型控制方法对应的响应波形。实验过程中,在6 s时刻之前,电机空载稳定运行于额定转速值,在6 s时刻,突加额定负载,对比图4(a)和图4(b),在负载稳态过程中,空载工况下,传统控制方法和新型控制方法下的电机实际转速值以及q轴电流值均较为平稳,抖振较小,突加额定负载后,传统控制方法下的转速电流响应波形出现较为严重的抖振现象,对比图4(b)新型控制方法,相应的转速电流相应波形较给定负载前无明显变化,体现出新型控制方法对于外部负载扰动的较强鲁棒性;在突加负载过程中,两者q轴电流值均迅速上升至额定值,对比图4(a)和图4(b),传统控制方法下的电流上升存在1 A左右的超调量,同时实际转速瞬间降低约400 r/min,约0.15 s后趋于稳定。而新型控制方法下的q轴电流仅存在约0.2 A的超调,并且转速值近瞬间降低100 r/min,后迅速上升至稳态值,动态性能优良。新型控制方法在抗扰动鲁棒性方面的优势得以体现。
为验证新型控制方法在转速时变工况下的实际转速跟踪响应性能,电机运行过程中,给定转速正弦波形实时变化,并且考虑给定负载转矩的突变。图5给定电机转速正弦变化下的实际转速跟踪响应波形,其中图5(a)为传统滑模控制對应的响应波形,图5(b)为新型控制方法对应的响应波形。实验过程中,在6.5 s时刻之前,电机处于空载工况,给定电机最大值2 500 r/min,最小值500 r/min的正弦变化转速值,由图可以看出,空载工况下,传统控制方法与新型控制方法实际转速均可较好地响应给定转速,新型控制方法在转速抖振方面占据一定优势。在6.5 s时刻,突加额定负载,传统控制方法下的转速跟踪立即出现较为严重的抖振现象,实际转速无法准确跟踪给定。相较于新型控制方法,突加负载后的转速除在6.5 s时刻瞬间存在较小的转速下降外,其余时刻转速跟踪与空载工况下几乎相同,抖振现象不明显,转速跟踪响应性能优良,新型控制方法在抗扰动鲁棒性方面的优势得以体现。
4结论
本文提出一种基于自适应模糊滑模软切换的永磁同步电机鲁棒无源控制方法。电流内环通过设计鲁棒无源控制器,提高电流预测控制的鲁棒性。转速外环设计模糊滑模软切换控制器,利用双曲正切函数代替符号函数,实现软切换连续控制。采用自适应模糊控制法估计集成不确定边界,有效削弱滑模抖振。
以一台1.2 kW永磁同步电机为实验对象,研究基于本文提出新型控制方法下的转速电流响应波形,考虑给定转速和给定负载转矩突变两种典型工况对电机运行的影响。实验过程对比传统滑模控制方法和新型控制方法,结果表明本文提出的新型控制方法可有效削弱传统永磁同步电机滑模控制固有的抖振现象,转速动态响应优良,并且对外部负载扰动有着较强的鲁棒性,该新型控制方法在高精度伺服应用领域有着广阔的前景。
参 考 文 献:
[1]周荔丹, 李杏, 姚钢,等. MP MMC驱动六相永磁风力发电机建模及控制研究.电机与控制学报,2019, 23(5): 84.
ZHOU Lidan, LI Xing, YAO Gang, et al. Modeling and control for six phase permanent mag netwind turbine driven by MP MMC. Electric Machines and Control, 2019, 23(5): 84.
[2]盖江涛, 黄守道, 黄庆, 等. 基于负载观测的永磁电机驱动系统自抗扰控制.电工技术学报, 2016, 31(18): 29.
GAI Jiangtao,HUANG Shoudao,HUANG Qing,et al.Active disturbance rejection controller for perma nent magnet motor drive system control based on load observer. Transactions of China Electro technical Society, 2016, 31(18): 29.
[3]彭熙伟, 高瀚林. 永磁同步电机的改进对角递归神经网络PI控制策略.电机与控制学报, 2019, 23(4): 126.
PENG Xiwei, GAO Hanlin. Improved diagonal rec ursion neural network and PI control of permanentmagnet synchronous motor. Electric Machines and Control, 2019, 23(4): 126.
[4]刘春强, 刘伊伦, 孔凡一, 等. 基于时变参数扰动观测器补偿的永磁同步电机非光滑速度调节器.电工技术学报, 2019, 34(4): 664.
LIU Chunqiang, LIU Yilun, KONG Fanyi, etal. Non smooth speed controller based on time varying p arameter disturbance observer compensation for per manent magnet synchronous motor. Transactionsof China Electro technical Society, 2019, 34(4): 664.
[5]林立, 黄苏融. 永磁同步电机系统线性化H∞鲁棒控制.电机与控制学报, 2009, 13(4): 541.
LIN Li, HUANG Surong. H∞Robust control with linearization technique for interior permanent magnet synchronous motor servo system. Electric Machines and Control, 2009, 13(4): 541.
[6]杨书生, 钟宜生. 永磁同步电机转速伺服系统鲁棒控制器设计.中国电机工程学报, 2009, 29(3): 84.
YANG Shusheng, ZHONG Yisheng. Robust controller design for PMSM speed servo systems. Proc eedings of the CSEE, 2009, 29(3): 84.
[7]高庆忠, 关焕新, 于子淞, 等. 自适应补偿器永磁同步电机积分型连续滑模控制.电机与控制学报, 2017, 21(2): 103.
GAOQingzhong, GUAN Huanxin, YU Zisong, et al. Integral continuous sliding mode control strategy with adaptive compensator for permanent magnet synchronous motor. Electric Machines and Control, 2017, 21(2): 103.
[8]崔家瑞, 高江峰, 張波, 等. 永磁同步电机滑模变结构鲁棒控制.电机与控制学报, 2016, 20(5): 84.
CUI Jiarui, GAO Jiangfeng, ZHANG bo, et al. Robust control of synchronous motor based on sliding mode variable structure. Electric Machines and Control, 2016, 20(5): 84.
[9]吴春, 齐蓉, 高峰. 基于扩张PCHD模型的永磁同步电机无源控制. 控制与决策, 2014, 29(5): 895.
WU Chun, QI Rong, GAO Feng. Passivity based control of permanent magnet synchronous motor based on extended PCHD.Control and Decision, 2014, 29(5): 895.
[10]刘栋良, 崔言飞, 赵晓丹, 等. 基于反推控制的永磁同步电动机速度的模糊控制.电工技术学报, 2014, 29(11): 38.
LIU Dongliang, CUI Yanfei, ZHAO Xiaodan, et al. Fuzzy control of speed of permanent magnet synchronous motor based on backstepping control. Transactions of China Electrotechnical Society, 2014, 29(11): 38.
[11]MORAWIEC M. The adaptive backstepping control of permanent magnet synchronous motor supplied by current source inverter. IEEE Transactions on Industrial Informatics, 2013, 9(2): 1047.
[12]ZHANG X,SUN L,ZHAO K,et al.Nonlinear speed control for PMSM system using sliding mode control and disturbance compensation techniques. IEEE Transactions on Power Electronics, 2013, 28(3): 1358.
[13]CHANG S,CHEN P,TING Y,et al.Robust current control based sliding mode control with simple uncertainties estimation in permanent magnet synchronous motor drive systems. IET Electric PowerApplications, 2010, 4(6): 441.
[14]LIU X,ZHANG C,LI K.Robust current control based generalized predictive control with sliding mode disturbance compensation for PMSM drives. ISA Transactions, 2017, 71(2): 542.
[15]BAIK I,KIM K,YOUN M.Robust nonlinear speedcontrol of PM synchronous motor using boundary layer integral sliding mode control technique. IEEE Transactions on Control Systems Technology, 2010,8(1): 47.
[16]S LI, M ZHOU, X YU.Design and implementation of terminal sliding mode control method for PMSM speed regulation system. IEEE Transactions on Industrial Informatics, 2013, 9(4): 1879.
[17]ZHANG B,PI Y,LUO Y.Fractional order sliding mode control based on parameters auto tuning for velocity control of permanent magnet synchronous motor. ISA Transactions, 2012, 51(5): 649.