电动汽车永磁同步电机DTC 策略优化研究
2016-06-29居晓琴
居晓琴

摘要:针对永磁同步电机(PMSM)在实现直接转矩控制(DTC)的过程中存在的低速电磁转矩脉动大的问题,提出了应用电压矢量细化控制策略和七阶滞环细化控制策略进行电动汽车永磁同步电机直接转矩控制策略的优化方法。首先深入研究DTC策略及其在PMSM中的实现方法;然后,在此基础上提出电压矢量细分策略和七阶滞环细分策略,对PMSM的DTC策略进行优化,以减小电磁脉动;最后,运用Matlab/Simulink对优化控制策略与系统进行建模和仿真实验,结果表明,优化后的DTC系统转矩脉动减少约17%,磁链圆曲线较窄,脉动明显降低。该方法可以有效用于电动汽车永磁同步电机的直接转矩控制。
关键词:电动汽车;永磁同步电机;直接转矩控制;转矩脉动
中图分类号:TP273 文献标识码:A 文章编号:1009-3044(2016)13-0230-03
永磁同步电机具有功率密度高、低速转矩密度高、调速范围宽、可靠性高等优点,成为现在新能源电动汽车驱动电机的主要发展方向,能够满足电动汽车低速恒转矩与高速恒定功率方面的相关需求[1-2]。进行能量转换的永磁同步电机主要采用矢量控制与直接转矩控制两种控制方法[3-6]。其中,以转矩为中心进行综合控制的直接转矩控制策略,是直接实现对电磁转矩的控制,车辆可获取优良的动态特性。
本文采用滞环细分策略与电压矢量细分理论对电机进行直接转矩控制等问题进行优化,运用Matlab/Simulink对优化控制策略与系统进行建模仿真,仿真结果验征优化策略的可行性和正确性。
1 直接转矩控制策略
1.1 直接转矩控制策略分析
定子DQ坐标系和转子dq坐标系中磁链空间矢量分析如图1所示,在转子dq坐标系中,对永磁同步电机进行分析。电磁转矩[5]可表示为
定子磁链矢量与转子磁链矢量的夹角定义为负载角。式(4)中中括号内左起第一、二项分别为励磁转矩与磁阻转矩大小。对于表贴式永磁同步电机则没有磁阻转矩。上式表明,在同步电机的相关参数已知的情况下,对应的电磁转矩的数值由定子与励磁磁场的磁链矢量对应的相位差和幅值大小等参量决定。
一般情况下,电机转子的值恒定不变。设计时,为了把电机铁心的作用实现最大程度的发挥,一般采用固定定子磁链的大小的方法。此时,只需调整负载角值就能实现对电磁转矩的合理调整和控制。
对于表贴式永磁同步电动机,由于,所以,式(4)可表示为
1.2 PMSM直接转矩控制策略的实现
能够实现综合控制目的的直接转矩控制原理如图2所示,在该控制系统中要对磁链和转矩进行控制,就必须选择合适的电压矢量[6-7]。为了选取合适的电压矢量,就必须分割电压矢量平面。如图3所示,电压矢量平面被分割为六个区域,每个区域以某一基本电压矢量为中心线,以两基本电压矢量的中心线为边界。
直接转矩控制采用两个滞环比较器来实现对转矩和磁链的控制,当给定值与反馈值的偏差在滞环比较器的上下限内,则输出维持上一个状态值不变;当超出上下限时,滞坏比较器则输出相应的设定值。
转矩和磁链滞环比较器的输入输出可用公式(6 )和(7 ) 表示。式(6)中转矩滞环比较器输出量1表不控制系统将增大转矩,T (k-1)表示上一时刻的转矩滞环比较器输出量,-1表示控制系统将减小转矩式(7)磁链滞环比较器输出量为1表示控制系统将增大磁链,表示上一时刻磁链滞环比较器输出量,-1表示控制系统将减小磁链。
2 直接转矩优化控制策略
2.1 电压矢量细分策略
理想情况下,只要控制系统采样周期足够小,功率器件的开关频率够高,应用SVPWM技术[8]可以合成连续的任意幅值任意角度的空间电压矢量,使得定子磁链的轨迹完全成圆形,电磁转矩对应的脉动很小并完全跟踪期望转矩,而且系统直流电压利用率非常高。然而现在的问题是,当具体操作时,该算法要对时间量进行计算,这样就会相应的增大控制周期的大小,这种情况对限制转矩发生震荡现象发生产生阻碍,对控制效果产生不良影响。
根据前述公式可知,需基本电压矢量(100)与来合成,可得到
同理,可得出合成时基本电压矢量(100)与(110)所需作用时间为;合成时基本电压矢量(100)与(110)所需作用时间为,。
根据细分矢量的圆周对称性,各扇区合成电压矢量除了两个基本电压矢量不同之外,有此特点:合成的电压矢量与合成的电压矢量的作用时间等同;合成的电压矢量与合成u3的电压矢直作用时间等同;合成电压矢直与合成的电压矢量的作用时间等同。合成电压矢量的幅值 恒为,所求时间结果显示并不需要零矢量作用。
为了使电压波揪对减小转矩脉动有利,这里把每种电压状态的作用时间都一分为二,使其关于0.5T中心线对称。以第一个扇区为例,合成电压矢量波形如图4所示。
2.2 七阶滞环细分策略
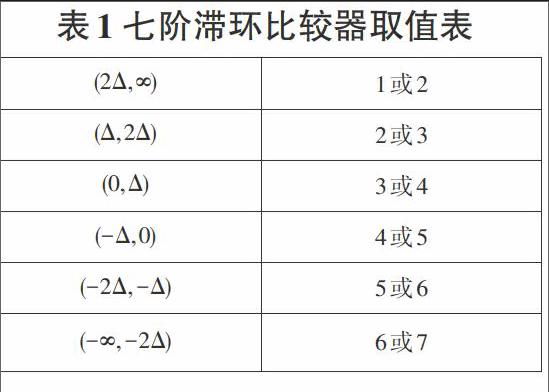
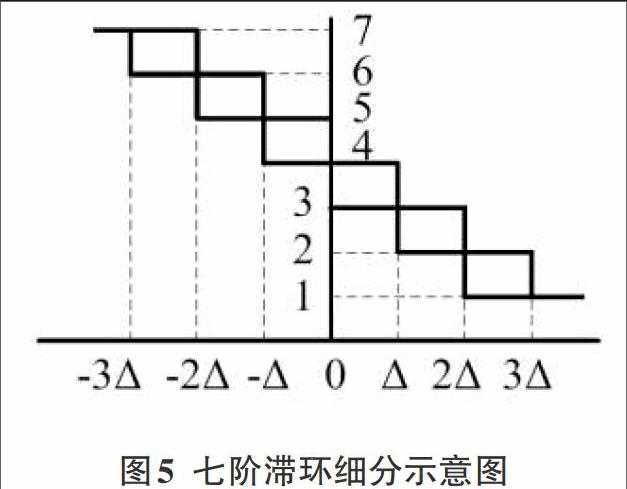
基本的滞环比较器只能取两个值,仅仅提供了偏差方向的信息(+1,-1),(偏差是期望值与实际值之差)这些偏差信息不能反映出实际偏差的大小,因此有控制不精确、转矩脉动偏大的问题[11]。为了解决这个问题,使开关电压矢量的选择更加合理,即不仅根据偏差信息,还要根据偏差的大小来确定,所以在此引入滞环细分的方法。将定子磁链和转矩偏差各自分为七个等级,见图5,等级1-7分别代表偏差信息:3、2、1、0、-1、-2、-3。绝对值越大代表需要采用能够越大程度的改变磁链与转矩的空间电压矢量。
当偏差落在以下某个区间时,取值见表1。
3 结论
为了解决永磁同步电机在实现直接转矩控制的过程中存在的低速电磁转矩脉动大问题,提出了应用电压矢量细化控制策略和七阶滞环细化控制策略优化永磁同步电机直接转矩控制策略。在Simulink仿真环境下,对采用常规直接转矩布控策略与优化策略的电机直接转矩控制操作进行建模和仿真,仿真结果表明优化后的系统动态响应快,电磁转矩脉动明显减小。
参考文献:
[1] 陈虹,宫洵,胡云峰,等.汽车控制的研究现状与展望[J]. 自动化学报, 2013, 39(4): 322-346.
[2] Li J,Yu J J,Chen Z. A Review of Control Strategies for Permanent Magnet Synchronous Motor Used in Electric Vehicles[J]. Applied Mechanics and Materials, 2013, 32(1): 1679-1685.
[3] Reza C, Islam M D, Mekhilef S. A review of reliable and energy efficient direct torque controlled induction motor drives[J]. Renewable and Sustainable Energy Reviews, 2014, 37(9): 919-932.
[4] 黄向慧,孙楠.基于模糊 SVPWM 的永磁同步电机直接转矩控制[J].计算机测量与控制, 2013, 21(11): 3004-3007.
[5] Hartani K, Maata F, Merah A. Sensorless Master-slave Direct Torque Control of Permanent Magnet Synchronous Motors Based on Speed MRAS Observer in Electric Vehicle[J]. Abdelkader Merah, 2014,37(6):1754-1760.
[6] 林海,周海森,张玲,等.软件决定开关模式的永磁同步电机 SVM-DTC 仿真建模[J].系统仿真学报, 2014, 23(4):140-144.
