基于波束形成与波叠加的噪声源三维定位方法研究
2019-11-02卓瑞岩何元章许国松
卓瑞岩,刘 成,何元章,许国松,刘 爽,张 立
(东风汽车集团有限公司技术中心,武汉 430063)
前言
噪声源的准确定位是噪声控制的关键[1]。基于波束形成技术的噪声源定位技术可以通过非接触、中远距离传声器阵列测量,得到噪声源在声成像平面上的二维坐标[2]。因此,波束形成技术在噪声源定位领域取得了广泛应用[3-5]。但波束形成无法识别噪声源三维坐标,且固有的旁瓣效应会引入虚假声源干扰。波叠加法最初应用于结构声辐射的计算[6],随着波叠加理论的不断改进和完善[7-11],其应用范围也得到扩展,结合波束形成和声全息等技术,波叠加法已在噪声源定位领域得到应用[12]。
因此,本文基于波束形成声源定位技术和声压匹配波叠加法基本思想,提出了波束形成与波叠加相结合的声源三维定位方法。该方法用波叠加等效源模拟实际声源,以重建传声器阵列声压误差作为评价指标,采用遗传算法搜索求解等效源三维坐标和源强,实现噪声源的准确三维定位,并根据求解所得等效源相对强度,重建声成像平面上声压分布,有效抑制了波束形成旁瓣效应造成的虚假声源干扰,使识别结果更加清晰。
1 噪声源信息预估
进行噪声源三维定位之前,须先基于波束形成技术进行噪声源数量和二维坐标等信息的预估。波束形成噪声源定位应用中,须预设声成像平面,平面上均匀分布的若干扫描点作为定位结果输出点。波束形成在成像平面上声源实际位置处输出较大,而其他位置输出幅值较小,通过各点输出幅值的对比达到声源定位的目的。
以空间坐标系原点为基准点,由于传声器阵列各阵元到声源距离不同,根据图1所示波束形成示意图推导出第m号阵元相对于基准点接收同一位置处声源发出信号的时间延迟或提前可表示为

式中:s为扫描点的位置向量;sm为第m号传声器阵元的位置向量;M为传声器数目;c0为声速。

图1 波束形成示意图
基于τm(s)将所有通道信号时域波形经过“相位对齐”后再进行“加权求和”,得到该扫描点处时域波束形成输出:

式中:pm(t)为第m号传声器时域声压;wm为m号传声器信号加权系数,取wm=1。通常需要单独对各个频段声源进行定位,因此对式(2)进行FFT变换后可得频域波束形成输出:

式中ω为声波角频率,ω=2πf,f为频率。
波束形成输出结果中,每一峰值均代表该处可能存在声源,峰值XY坐标即为声源的XY坐标。因此,可基于波束形成实现声源个数和二维坐标的预估,将输出峰值二维坐标作为搜索求解声源三维坐标的初始值,如图2所示。

图2 波束形成声源定位示例
2 噪声源三维定位
为识别噪声源三维坐标并消除波束形成旁瓣效应干扰,提出波叠加法与波束形成相结合的噪声源三维定位方法(图3),该方法主要分为3步:
(1)基于波束形成技术对噪声源数量及二维坐标进行预估,预估结果中每一个峰值均表示该处可能存在声源;
(2)提取主要峰值所对应的二维坐标,并在该处布置波叠加等效源,以等效源模拟实际声源,该布置位置则作为搜索声源三维坐标的初始值;
(3)以遗传算法为搜索求解工具,以重建传声器声压误差作为评价指标,搜索求解声源三维坐标及对应源强。

图3 噪声源三维定位方法流程
根据波叠加法基本思想,声场中任意一点的声压均可由各声源(等效源)强度与格林函数计算得到

式中:p(r)为场点r处声压;M为等效源总数;ρ为空气介质平均密度;ω为振动圆频率;rm为其中一个等效源坐标;q(rm)为 rm处等效源强度;G(R)为自由场格林函数,即

式中:R为 rm与 r的距离,R=|rm-r|;k为波数,k=ω/c。再将式(4)写成矩阵的形式,即

式中:P为场点声压向量;Q为等效源强度向量;T为P与Q传递函数矩阵,即

式中:GNM(R)为第N个场点与第M个等效源间格林函数;R为第N个场点与第M个等效源间空间距离。
当等效源和场点位置确定后,T可通过格林函数计算得到;之后测量得到场点声压P1,代入式(6)反算出等效源源强Q。为保证方程有唯一解,需令N≥M。根据计算所得等效源强度,可再由式(7)计算得到其他场点处声压值P′(R)为

由于在搜索等效源位置过程中,R为变量,因此P′,T′和Q′均为 R的因变量,只有当搜索过程中R与真实声源位置相同时,P′(R)和 Q′(R)才会与实际值相等;而当R偏离真实声源位置时,P′(R)和Q′(R)也会偏离实际值。
因此,设定目标函数为

P1与P2通过阵列声压测量获取,场点声压P1用于搜索过程中计算等效源强度,场点声压P2用于搜索过程中判断等效源位置和强度是否准确,P1与P2场点位置不能重合,否则搜索无法进行。E(R)值的大小可作为评价搜索过程中等效源位置R与真实声源偏差大小的指标,E(R)越小,等效源距离真实声源越近。
3 搜索模型
根据本文提出算法的基本思路,图4示出搜索空间的定义方法。

图4 声源三维坐标搜索模型
图4 中“·”为波束形成定位结果,在该处布置波叠加等效源,虚线矩形框为根据波束形成定位结果确定的遗传算法搜索求解空间。在遗传算法对等效源位置进行搜索求解的过程中,各个等效源在图4中虚线框所示搜索范围内随机变化组合,直到各等效源位置均与实际声源位置重合,此时E(R)达到最小值,等效源的空间位置R即为所求最优解,搜索求解过程结束。
4 试验验证
以扬声器作为已知声源,在半消音室中进行上述噪声源三维定位方法的有效性验证。
4.1 试验模型
本试验所设计传声器阵列为4×4的16阵元等间距平面网格阵列,阵元间距0.1 m。设定波束形成声成像平面为Z=1 m平面,传声器阵列位于Z=0平面,阵列中心为空间坐标系原点O。在空间点(0,0,1.5 m)处布置扬声器作为声源,播放声音频率为3 000 Hz。试验模型如图5所示,图中示出了声源、声成像平面及传声器阵列面之间空间位置关系。试验现场如图6所示。
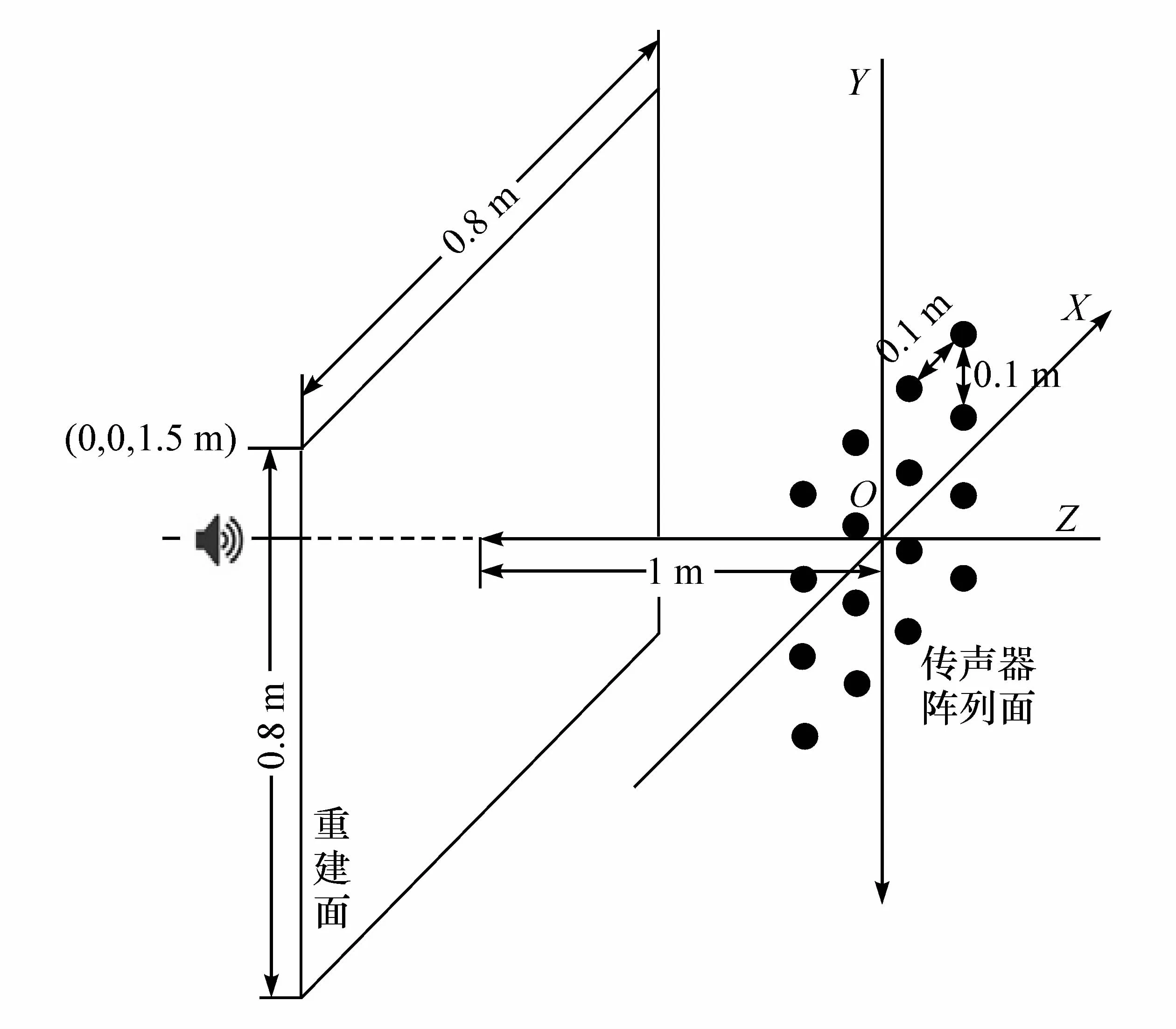
图5 试验模型

图6 试验现场
4.2 试验结果
基于4.1节所述试验模型,首先进行噪声源数量及二维坐标信息预估,然后进行噪声源三维定位。
4.2.1 噪声源预估结果
基于波束形成对噪声源的XY二维坐标进行识别,噪声源预估结果如图7所示。

图7 噪声源预估结果
将波束形成识别结果中主瓣及旁瓣的XY坐标和幅值信息进一步提取如表1所示。

表1 噪声源预估结果 m
由表1可知:主瓣(即旁瓣比100%处)对应真实声源,且主瓣XY坐标为(-0.02 m,0),与实际声源 XY坐标(0,0)误差仅为 0.02 m;但同时在(0.02 m,0.44 m)和(0.02 m,-0.40 m)处存在旁瓣比高达84.2%和81.9%的虚假声源干扰。
4.2.2 噪声源三维定位结果
基于波束形成准确识别出真实声源二维XY坐标基础之上,在主瓣及旁瓣处均布置波叠加等效源,运用本文提出方法,进行声源三维坐标识别和旁瓣干扰抑制,计算结果如表2所示。识别出真实声源三维坐标为(-0.02 m,0,1.54 m),与声源真实的三维坐标(0,0,1.5 m)相符。

表2 噪声源三维定位结果 m
再由计算所得波叠加等效源强度,重建出二维重建面,其旁瓣效应消除结果如图8所示。由图可见,二维定位结果更加清晰明辨,旁瓣比分别由84.2%和81.9%下降为32.2%和48.1%,旁瓣效应造成的虚假声源干扰被很好抑制。

图8 旁瓣效应消除结果
5 结论
(1)为对噪声源进行三维定位,本文中根据波叠加法基本思想,提出了基于波束形成的噪声源三维定位方法。试验结果表明,所提出方法可准确识别噪声源三维坐标,并可通过等效源强度计算和重建面声压重建,有效抑制波束形成旁瓣效应造成的虚假声源干扰。
(2)所提出方法中对声源进行了假设,即通过中远程阵列声压测量时,被定位声源可近似为点声源,因此该算法更适用于分布较为稀疏的点声源三维定位。
