一种新型主动横向稳定杆装置的设计与特性分析*
2019-11-02张红党吴海东张凤娇江晓莹
陈 松,张红党,吴海东,张凤娇,江晓莹
(1.常州机电职业技术学院,常州 213164; 2.南通航运职业技术学院,南通 226010)
前言
横向稳定杆作为车辆悬架的辅助弹性元件,主要作用是减小车辆在转向时的侧倾。而对于质心较高的SUV车辆处于高速大转角等工况时,由于无法根据车辆的行驶状况调整车辆的侧倾角刚度,故会使车辆容易发生侧翻[1]。针对传统被动横向稳定杆存在的问题,一种能够根据车辆的行驶状况,主动调整车辆侧倾角刚度的主动横向稳定杆(AARB)装置成为了研究的热点[2]。
英国剑桥大学的Sampon团队[3-4]针对质心较高的铰接车辆容易出现侧翻的问题,采用液压式AARB装置并建立了主动侧翻控制模型,通过仿真与试验验证了该AARB装置能有效避免车辆在高速转向时的侧翻。韩国的KIM等[5]基于液压式AARB装置设计了前馈与反馈控制器,并通过仿真与台架试验验证了该装置对车辆的侧倾稳定性具有较好的控制效果。Davide等[6]针对轿车转向行驶时的侧倾控制问题,提出了一种电机控制式的AARB装置,通过采用鲁棒控制提高了对电机转速的控制效果。华中科技大学段小成等[7]针对SUV车辆在转弯时容易发生侧翻的问题,提出了采用AARB装置并设计了模糊PID控制器进行控制,通过仿真试验验证了该装置对车辆的侧倾控制效果。南京理工大学丁义兰等[8]针对某重型车辆,提出了一套电机控制式的AARB装置,依据车辆的不同行驶工况制定了不同的控制策略,有效解决了重型车辆在各行驶工况下的侧翻控制问题。江苏大学郑恩瑞等[9]分别在MATLAB中建立了AARB的模糊控制器和在ADAMS中建立了整车多体动力学模型,在此基础上进行了联合仿真,较好地实现了对车辆侧倾的主动控制。
大量的研究都集中在采用液压控制式或电机控制式的AARB装置替换传统的被动横向稳定杆装置来实现对车辆转向侧倾时的主动控制,但到目前为止都没有在对所设计的AARB杆装置建立侧倾角刚度计算模型的基础上,分析各结构参数对车辆侧倾角刚度的影响规律。由于电机控制式的AARB与液压控制式相比[10],具有响应速度快、结构简单、成本低、维修与改装方便等优点,同时考虑到谐波齿轮机构具有传动比大[11]、体积小、传动平稳、噪声小和传动效率高等诸多优点,本文中基于谐波齿轮结构设计了一种电机控制式的AARB装置,建立了车辆侧倾角刚度的计算模型,分析各结构参数对侧倾角刚度的影响规律。在此基础上,通过试验来验证该AARB在车辆侧倾控制方面的效果。
1 电动AARB装置
图1所示为本文中所提出的电机控制式AARB装置的结构示意图,该AARB装置主要由左右齿轮减速机构、左右稳定半杆、悬架连接臂、ECU和直流电机等组成。电机的电枢轴与左、右两侧谐波齿轮中的波发生器相连。

图1 AARB结构示意图
当车辆转向发生侧倾时,ECU驱动直流电机工作,带动左、右谐波齿轮机构中的波发生器旋转。在左侧的谐波齿轮机构中,波发生器为主动件;由于柔轮与底盘固连,为固定件;刚轮与左侧的稳定半杆连接,为输出件。在右侧的谐波齿轮机构中,波发生器为主动件;由于刚轮与底盘固连,为固定件;柔轮与右侧的稳定半杆连接,为输出件。
则左侧的谐波齿轮传动比i[12]为

右侧的谐波齿轮传动比 ih′[12]为

式中:z3为左侧谐波齿轮机构中柔轮的齿数;z4为左侧谐波齿轮机构中刚轮的齿数;z3′为右侧谐波齿轮机构中柔轮的齿数;z4′为右侧谐波齿轮机构中刚轮的齿数;n为左侧谐波齿轮机构中刚轮与柔轮的齿数差;n′为右侧谐波齿轮机构中刚轮与柔轮的齿数差。由于左、右两侧的谐波齿轮机构均采用双波式,故 n=n′=2。此时式(1)和式(2)变为

选取 z3′=z4时,ih=-ih′,此时左、右横向稳定半杆输出大小相等、方向相反的力矩。当车辆转向发生侧倾时,AARB的ECU根据车辆的侧倾情况,对直流电机输出力矩的大小与方向进行控制,通过左、右两侧的谐波齿轮减速机构,使左、右稳定半杆产生较大的反力矩,实现对车辆侧倾的主动控制。由于车辆转向时的车速与转向盘转角不同导致车辆的侧向加速度不同,对应的侧倾角也不同,为使车辆的侧倾随侧向加速度的变化符合驾驶员感知规律,以便驾驶员通过采取减速等方法减小车辆进一步的侧倾,防止车辆侧翻的发生,侧向加速度与理想侧倾角间的变化关系应具有如图2中的0ABC线段所示[13]。
车辆侧倾控制时,ECU通过对侧向加速度传感器的采样经计算得到车辆的理想侧倾角,并将其与实际侧倾角的差值作为如PID、模糊、滑模等控制器的输入参数,输出参数为直流电机产生的转矩,实现对车辆理想侧倾角的跟踪。
当车辆直线行驶在较平坦路面上时,车辆产生的侧倾角较小,ECU对电机不供电,电机不工作以减少能耗和延长直流电机的使用寿命。当一侧路面有较小颠簸或两侧均有较小颠簸但一侧颠簸程度大于另外一侧时,ECU同样不对电机供电。现以左侧为例对AARB中电机不供电的情况进行分析:左侧路面的较小颠簸会使得左侧的横向稳定半杆产生较小的转矩T1带动左侧谐波齿轮机构的刚轮产生转动,由于左侧的柔轮固定,此时左侧波发生器变成了从动件,电机输出轴被拖动。

图2 侧向加速度ay与理想侧倾角φ特性图
此时,电机输出轴得到的转矩为

将式(5)进一步化简得

由于电机的输出轴同时与左、右谐波齿轮机构的波发生器固连,故电机输出轴的转动会使右侧谐波齿轮机构中的波发生器转动进而带动右侧稳定半杆的转动。此时,右侧的波发生器仍为主动件,右侧的刚轮为固定件,柔轮为从动件。
同理可得右侧稳定半杆得到的转矩为

式中:Tm为电机输出轴得到的转矩,N·m;T1,T′1分别为左、右侧横向稳定半杆产生的转矩,N·m;
前面已得出 ih=-ih′ ,联合式(6)与式(7)得

即左、右两侧的稳定半杆产生大小相等、方向相反的转矩。故当一侧路面有较小颠簸或两侧均有较小颠簸但一侧颠簸程度稍大于另一侧时,AARB在功能上相当于被动横向稳定杆。同样,当ECU出现故障时,ECU对电机也不供电,电机不工作。此时AARB在功能上也相当于被动横向稳定杆,增加了AARB装置的可靠性。
2 侧倾角刚度计算
当车辆发生侧倾时,ECU触动直流电机工作,通过两侧的谐波齿轮机构带动左右稳定半杆相对扭转,从而使AARB从原来车辆没有发生侧倾时的ABCDEF位置变成车辆发生侧倾时的A’BCDEF’位置,如图3所示。图中:BE为杆件体;C,D点通过橡胶套与悬架弹簧下支座连接;AB,EF为与杆件体相连的连接杆,并假设稳定杆的杆件在承受侧倾力矩时只发生扭转,不产生弯曲。

图3 AARB侧倾时的几何关系及受力图
车辆发生侧倾时,采用变形叠加法得A’和F’两点沿z方向的绝对位移量Δz,为车辆侧倾引起的垂直位移与AARB作用时产生的位移之和,即

则AARB在zox平面内的绝对转角β为

因此,AARB对应的侧倾角刚度Kφ为

将式(9)代入式(11)并化简得

根据车辆发生侧倾时的几何关系,结合图2得

考虑到 φb,φ较小,有 tanφb≈φb,tanφ≈φ,将式(13)和式(14)分别化简得


由式(15)和式(16)得

根据车辆发生侧倾时电机经过谐波齿轮减速机构产生的转矩与AARB产生的对车辆反侧倾力矩的关系,得出图2中A’点所受的力Frod为

对式(18)化简得

将式(17)和式(19)代入式(12)得

式(9)~式(20)中:Δz为 A’,F’两点沿 z方向的绝对位移量(两者相等),m;φb为左、右两侧稳定半杆经减速机构后各自输出的转角(两者相等),(°);φ为车身侧倾角,(°);f为 AARB左、右摇臂末端的垂向位移(两者相等),m;L为横向稳定杆的横向总长度,m;b为稳定杆摇臂的纵向长度,m;A’B与BE和EF’与BE的夹角均为α,(°);Frod为AARB作用时对摇臂末端产生的垂向力,N;MT为稳定半杆产生的转矩,N·m;MR为AARB产生的反侧倾力矩,N·m;E为材料的弹性模量,Pa;I为稳定杆主惯矩,m4。
3 侧倾角刚度影响参数分析
当车辆转向侧倾时,AARB根据车辆的侧倾情况,通过改变电机输出转矩的大小与方向来调节车辆侧倾角刚度,以实现对车辆侧倾的主动控制。为研究通过改变AARB的侧倾角刚度实现对车辆侧倾的主动控制,须对AARB侧倾角刚度的影响因素进行分析。在实际安装时,横向稳定杆的横向总长度L一般为定值,根据式(20)中的主要影响参数并结合某一车型,该车的主要参数如表1所示。针对该车的稳定杆安装与工作的实际情况[14],取参数MT=80~175 N·m,60°≤α≤120°,b/L=0.15~0.4,φb=2°~9°,进行AARB作用时的车辆侧倾角刚度特性的分析。
(1)α对车辆侧倾角刚度的影响

表1 车辆参数
在研究α对车辆侧倾角刚度影响时,取α=90°为参考点,并定义不同α值下的车辆侧倾角刚度相对于参考值α=90°时的变化率为

分别改变 φb,MT和 b/L进行仿真,分析不同φb,MT和b/L下,ΔKφ随α的变化关系,结果如图4~图6所示。

图4 b/L=0.25,M T=110 N·m,φb取不同值时,刚度变化率与α的关系
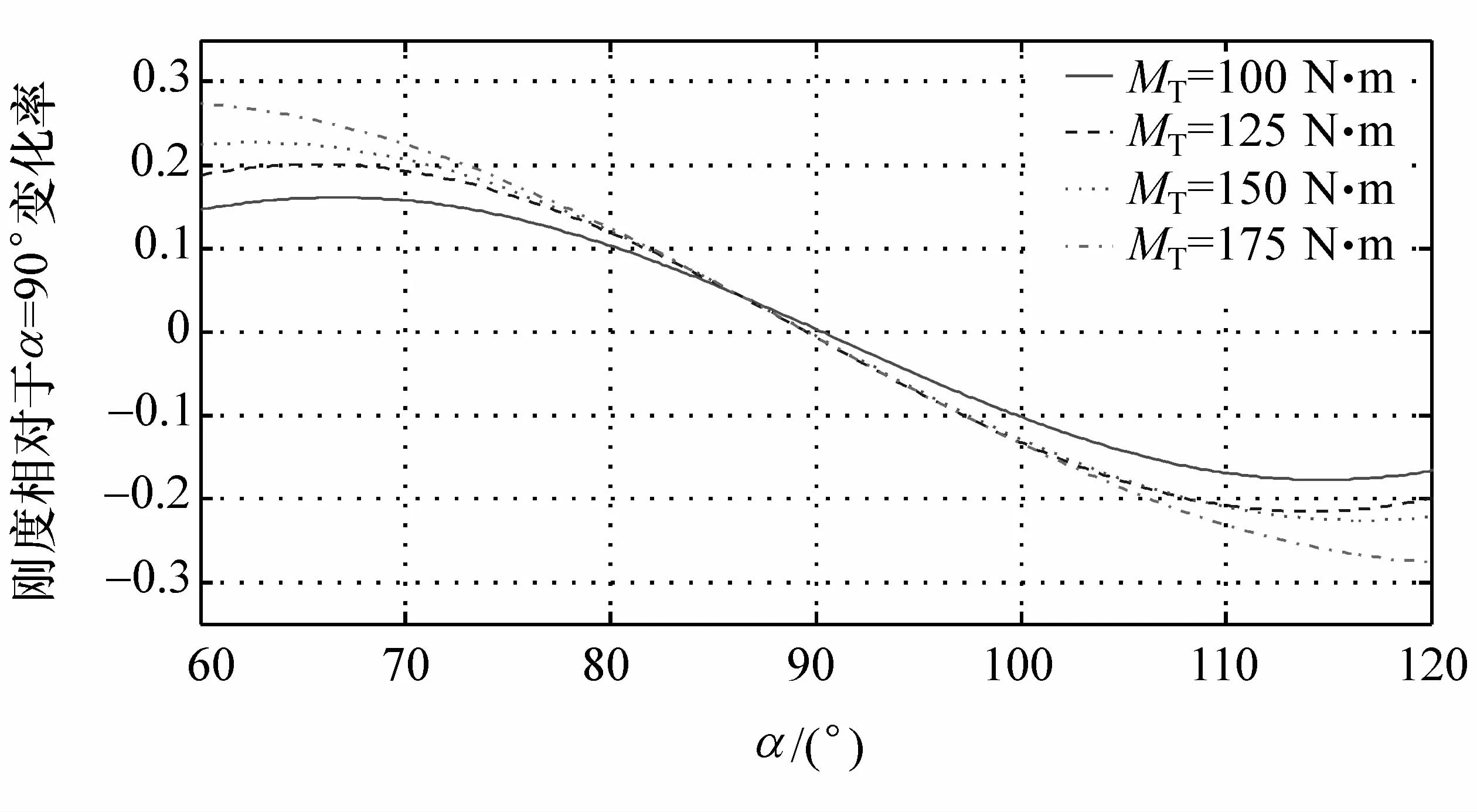
图 5 b/L=0.25,φb=6°,M T取不同值时,刚度变化率与α的关系

图 6 M T=110 N·m,φb=6°,b/L取不同值时,刚度变化率与α的关系
由图4~图6可知,在b/L,MT,φb分别取不同的值时,随着AARB的中部与纵向部分的夹角α的增加,车辆的侧倾角刚度减小。但总的来说α对车辆的侧倾角刚度影响较小,为方便分析其它参数对车辆侧倾角刚度的影响,以下均取α=90°进行分析。
(2)b/L对车辆侧倾角刚度的影响分析
取b/L=0.25为参考点,同样由式(21)定义不同b/L值时的车辆侧倾角刚度相对于参考值b/L=0.25的变化率 ΔKφ,再分别改变 φb和 MT进行仿真,分析不同φb和MT下ΔKφ随b/L的变化关系,结果如图7和图8所示。

图7 M T=110 N·m,φb取不同值时,刚度变化率与b/L的关系

图8 φb=6°,M T取不同值时,刚度变化率与b/L的关系
由图7和图8可知,在MT与φb分别取不同的值时,AARB摇臂的纵向长度与横向总长度的比值对AARB的侧倾角刚度影响较大,b/L的增加会明显减小车辆的侧倾角刚度。一般AARB的横向总长为定值,故增加 AARB摇臂的纵向长度会降低AARB的侧倾角刚度。
(3)MT对车辆侧倾角刚度的影响
取MT=110 N·m为参考点,并同样由式(21)定义不同MT值下的车辆侧倾角刚度相对于参考值MT=110 N·m时的变化率ΔKφ,再分别改变b/L和φb进行仿真,分析不同 b/L和 φb下,ΔKφ随 MT的变化关系,结果如图9和图10所示。

图9 φb=6°,b/L取不同值时,刚度变化率与M T的关系

图10 b/L=0.25,φb取不同值时,刚度变化率与M T的关系
由图9和图10可知,在b/L与φb分别取不同的值时,稳定杆输出力矩MT对AARB的侧倾角刚度有一定影响,但与其它参数不同的是,它的增加会增大车辆的侧倾角刚度。由于本文中采用双头输出的电机,故两侧输出转矩之和为电机的输出转矩。由于左右两侧谐波齿轮的传动比相同,故双头电机的每一侧输出转矩为电机输出转矩的一半,则稳定杆输出转矩MT为

由式(22)可知,在直流电机输出转矩Tm一定的情况下,增加谐波齿轮传动比ih,会增加AARB输出的转矩MT,从而AARB的侧倾角刚度会明显增加。
(4)φb对车辆侧倾角刚度的影响分析
取φb=6°为参考点,并同样由式(21)定义不同φb值时的车辆侧倾角刚度相对于参考值φb=6°的变化率ΔKφ,分别改变b/L和MT进行仿真,分析不同b/L和MT下,ΔKφ随 φb的变化关系,结果如图11和图12所示。
相较于峨眉、昆仑等其他门派对魔教的敌视,武当对于魔教的态度似乎有些模棱两可。理智上他们觉得魔教行事诡谲,不为道义所容,如张翠山在初识殷素素时就曾因她是天鹰教弟子而抗拒与其交往。但情感上他们却又能无视对方的身份,对所接受的人付出真心,如张翠山带殷素素回武当时,师门也对他们表示祝福,并且尽力维护。

图11 M T=110 N·m,b/L取不同值时,刚度变化率与φb的关系

图12 b/L=0.25,M T取不同值时,刚度变化率与φb的关系
由图11和图12可知,在b/L与MT分别取不同的值时,稳定半杆输出转角φb对AARB的侧倾角刚度有一定影响,它的增加会减小车辆的侧倾角刚度。根据所设计的AARB的工作原理,得

式中θm为直流电机输出转角,(°)。
在直流电机输出转角θm一定的情况下,增加谐波齿轮传动比ih,会减小稳定半杆输出的转角φb,从而使AARB的侧倾角刚度增加,这与在采用MT对AARB的侧倾角刚度的分析结论一致。
4 AARB试验研究
为验证所设计的AARB在控制车辆侧倾方面的效果,搭建硬件在环试验台架,如图13所示。首先在主机上采用MATLAB/Simulink建立整车动力学模型并编写控制程序,然后将模型和程序经Real-Time Workshop(RTW)转换成C代码后下载至目标机上实时运行。采用交流电机代替发动机实现车轮转速调节,试验人员根据转向试验工况对转向盘进行操纵,车辆的转向盘转角信号、AARB电机转子位置信号和车辆轮速信号通过研华数据采集卡PCL-818L采集处理后传递给目标机。目标机一方面将接收到的信号通过TCP/IP传给主机;一方面由其上的模型根据接收到控制信号,计算出车辆运行参数数据,如侧倾角、侧向加速度等,发送给 ECU。ECU据此对AARB的直流无刷电机施行控制,同时通过相应的传感器将直流无刷电机的转子位置、电机电流等信号的实时运行参数通过数据采集卡PCL-818L再次传输给目标机,实现硬件在环仿真试验的闭环控制。

图13 硬件在环试验台架
车辆的侧翻往往出现在高速转弯和严重的车道变换等极限工况下,由于双移线工况是国内外使用频率较高的一种极限测试工况,本文中也采用双移线工况测试AARB对车辆侧倾的控制效果。对车速为80 km/h、行驶在附着系数为0.85的路面上的车辆进行硬件在环试验,转向盘转角输入如图14所示。对不施加控制的被动系统(图中为Open Loop)与AARB控制系统(图中为AARB)进行对比,仿真结果如图15~图17所示。

图14 转向盘双移线输入

图15 双移线输入下车辆的侧倾角

图16 双移线输入下车辆的侧倾角速度
5 结论
(1)为实现车辆侧倾的主动控制,设计了一种基于谐波齿轮的电机控制式的AARB装置。

图17 双移线输入下车辆的横向载荷转移率
(2)在对该AARB装置建立侧倾角刚度计算模型的基础上,通过仿真分析各结构参数对车辆侧倾角刚度的影响规律。
(3)通过硬件在环试验得出,在车辆侧翻控制方面,装有AARB的车辆比装有传统被动横向稳定杆的车辆具有更好的控制效果,为采用该种新型AARB来实现对车辆侧倾的主动控制提供参考。
