穿梭车控制器硬件在环仿真平台的设计
2019-10-11沈金鑫赵振南
沈金鑫,赵振南
(南京音飞储存设备(集团)股份有限公司,江苏 南京 211102)
1 概述
穿梭车是智能化仓储系统中一种搬运货位单元(主要是托盘和料箱)的自动化设备,在货架铺设的轨道上行走来进行货位单元的输送,包含多层穿梭车、子母车、四向穿梭车等。四向穿梭车可实现平面内X 方向和Y 方向的运动,具备自动切换方向的功能,而且允许同一平面内多辆穿梭车同时进行作业[1-2]。
目前,功能测试都需要实车在货架上才能进行测试,在初期控制策略或功能尚不完善的情况,带来了较大的不确定因素和可能存在的风险,而且某些异常情况在货架上进行模拟非常麻烦。基于此,提出了搭建一套穿梭车硬件在环仿真平台,用于对穿梭车控制器的控制策略和功能进行调试和测试。
硬件在环仿真是指用实时的数学模型来模拟被控对象及其传感器、执行器,能够模拟被控对象的各种行为和状态,并与已装载控制软件的控制器进行连接,从而使得控制器能够正确工作和运行。具有可以降低研发成本,缩短系统开发周期,并且实验可重复性好,可模拟极端或故障条件,广泛应用于汽车、航空航天、医疗器械等领域[3-4]。
硬件在环仿真平台由Ethernet通信控制主机、行走仿真板卡、换向仿真板卡、顶升仿真板卡、货叉仿真板卡和能源仿真板卡组成,与PC上位机仿真控制软件通过以太网进行通信,通过I/O 接口、RS-485 接口、CAN 接口、A/D 转换、D/A 转换、正交脉冲接口与被测的穿梭车控制器连接,对被测穿梭车控制器进行全方面的、系统的测试。硬件在环仿真系统架构,如图1所示。
硬件在环仿真平台中,Ethernet通信控制主机与各个功能仿真板卡(行走仿真板卡、换向仿真板卡、顶升仿真板卡、货叉仿真板卡和能源仿真板卡)之间通过CAN 总线和RS-485 总线进行通信,数据量大、时效性低的配置数据通过RS-485进行传输,数据量小、高实时的过程数据通过CAN总线进行传输。

图1 硬件在环仿真系统架构图
2 通信控制主机的设计
通信控制主机主要实现基于仿真控制软件通过Ethernet下发的策略对仿真模型进行运算,通过CAN总线和RS-485 总线给各个功能仿真板卡发送故障注入指令,并接收各个功能仿真板卡返回的相关参数传输至仿真控制软件[5-6]。
通信控制主机内建1 个TCP Server 和1 个TCP Client,用于和PC上位机仿真控制软件进行通信;通过1 路CAN 总线与各个功能仿真板卡进行高实时的数据交换,通过1 路RS-485 总线与各个功能仿真板卡进行非实时的数据传输。
2.1 硬件电路设计
通信控制主机的单片机采用MIPS32®microAptiv™和M-Class 内核的PIC32MZ1024EFM,主频200MHz,自带1MB Flash 和512KB RAM,支持浮点运算(FPU),带MII 和RMII 接口的10/100 Mbps 以太网MAC。外围电路需要设计一个以太网PHY 电路,CAN总线接口和RS-485接口。
2.1.1 以太网PHY电路。以太网PHY接口采用Microchip 公司的LAN8720AI,通过标准RMII 接口与以太网MAC 通信,支持10Mbps 和100Mbps 运行和HP Auto-MDIX,可使用直连或交叉LAN 电缆。以太网PHY电路原理图如图2所示。
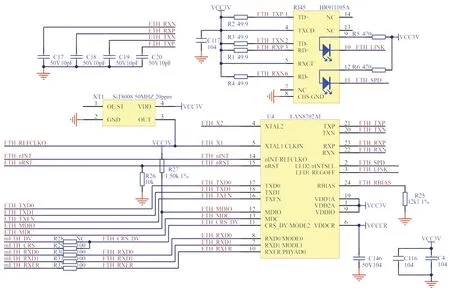
图2 以太网PHY电路
2.1.2 CAN 收发器电路。PIC32MZ1024EFM 内部的CAN 模块完全符合CAN 2.0B 协议,最高速率1 Mbps,32 个报文接收与发送FIFO,每个FIFO 最多可包含32条报文,总共可包含1 024条报文。
在CAN 制器和物理总线之间需要CAN 收发器,为总线提供差分发射能力并为CAN控制器提供差分接收能力,CAN收发器电路图如图3所示。
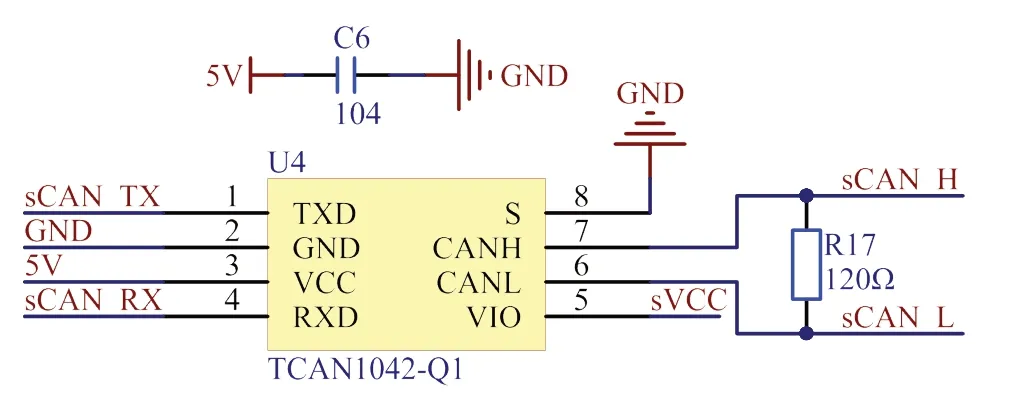
图3 CAN收发器电路
2.1.3 RS-485接口电路。PIC32MZ1024EFM内部的UART(通用异步收发器)模块,具有8级深FIFO发送和接收数据缓冲区,可以更好地进行数据传输。
RS-485接口采用平衡驱动器和差分接收器的组合,抗共模干扰能力增强。RS-485 接口电路如图4所示。
2.2 软件程序设计
通信控制主机程序包括主程序、模型运算、Eth-ernet接口、CAN接口、RS-485接口等部分。

图4 RS-485转换电路
主程序在完成外设初始化之后,初始化TCP/IP软件协议栈并创建1个TCP Server和1个TCP Client,TCP Client连接至PC上位机仿真控制软件的Server,接收仿真控制软件的配置信息并回传各个功能仿真板卡的当前参数;在主程序中按照配置的信息进行模拟运算,并通过CAN接口和RS-485接口与各个仿真板卡进行数据传输,根据故障配置信息即时给各个功能仿真板卡发送故障注入指令[7-8]。
3 行走仿真板卡的设计
行走仿真板卡要能够模拟行走伺服驱动器的CANopen 协议接口和I/O输入输出、从动轮编码器脉冲信号、与行走有关的测距传感器和光电传感器的状态。
当接收到穿梭车控制器输出的速度控制0-10V模拟量、使能和方向2个I/O,能够更新CANopen中状态字、当前电流、当前速度、编码器脉冲数等参数,同时通过PWM输出与速度对应的正交编码器脉冲数。当接收到控制主机发送的故障模拟指令时,能够产生与之对应的故障,例如模拟行走起始时被卡,则模拟输出的从动轮编码器脉冲数输出小于模拟输出的伺服驱动器CANopen 中的编码器脉冲数,且实际电流输出较大。
3.1 硬件电路设计
行走仿真板卡采用意法半导体公司的STM32F407 微控制器,外围具有2 个CAN 总线接口、2个RS-485接口、1路模拟量输入、3个数字量输入、1个数字量输出、1 组正交编码器脉冲输出、2 路4-20mA输出。
STM32F407系列微控制器基于ARMRCortexR-M4内核,主频高达168MHz,支持浮点运算(FPU),具有2个CAN接口,6个串行通信接口,2个DAC输出。
3.1.1 模拟输入电路。模拟输入电路如图5所示,采用分压电路和单位增益的运放缓冲器构成,然后由STM32F407 内部ADC 进行转换,用于采集穿梭车控制器输出的控制行走电机速度的0-10V模拟量。当输入电压过高的时候,TVS6就会工作,从而保护输入电路。

图5 模拟输入电路
3.1.2 4- 20mA 输出电路。 4- 20mA 电流由STM32F407 内部DAC 经过电压跟随器,与R54 电流采样电阻上的电压进行比较,从而控制N-MOS 的导通与否。模拟输出电路如图6所示。

图6 4-20mA输出电路
3.1.3 I/O输入输出电路。穿梭车控制器输出的驱动器使能、行走方向、清除报警等24V 数字量通过TLP184光耦来实现电平转换,原理图如图7所示。
行走仿真板卡产生的驱动器报警信号、光电传感器信号都是由高侧智能功率开关芯片ITS4200 来实现的,具有过流保护功能,原理图如图8所示。

图7 24V数字量输入电路
3.1.4 正交脉冲输出电路。正交编码器脉冲是由STM32F407内定时器PWM模式产生2路PWM信号,通过高速光耦TLP152 转换为24V,并设置有关参数使得相位相差1/4T。正交脉冲输出转换电路如图9所示。
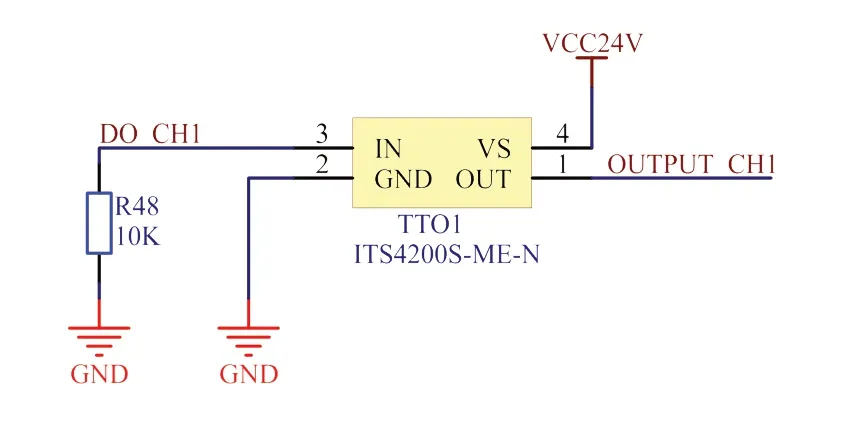
图8 24V数字量输出电路

图9 正交脉冲信号处理电路
3.2 软件程序设计
程序流程图如图10 所示,程序包括主程序、CANopen 协议接口、与控制主机之间的数据交换、处理速度输入的定时任务等部分。
主程序在完成外设初始化之后,开启一个ms 级的定时器中断,在中断中读取模拟量输入并换算实时速度,实时输出正交脉冲,积分得到实际位置,更新CANopen协议中的状态字、实际速度、实际电流等参数。在主循环中处理电机CANopen 接口,能够模拟实际电机的运行状态。同时,通过CAN 接口与RS-485 接口向控制主机反馈响应的数据信息,且执行控制主机下发的故障注入指令,并在指定的情况下注入指定的故障。
3.3 其他仿真板卡的设计
换向仿真板卡、顶升仿真板卡、货叉仿真板卡及能源仿真板卡,能够模拟伺服驱动器的CANopen 协议接口、RS-485 接口的传感器或执行器和24V 数字量信号。

图10 行走仿真板卡程序流程图
换向仿真板卡要能够模拟2 个伺服电机的CANopen 协议接口和用于姿态检测的接近开关传感器;顶升仿真板卡模拟1个伺服电机驱动器的CANopen协议接口、RS-485接口的角度传感器和用于状态检测的接近开关传感器;货叉仿真板卡模拟1个伺服电机驱动器的CANopen 协议接口、RS-485 接口的拨杆控制板和用于货位检测的光电传感器;能源仿真板卡能够模拟电池或超级电容的RS-485通信接口、用于指示电量的数字量信号。
4 结论
该硬件在环仿真平台能通过各个功能性仿真板卡模拟出穿梭车运行所需要的信号和各个动作流程,且便于实现各种现实中难以实施或有危险的故障注入。经过调试和试验,该硬件在环仿真平台已成功应用于料箱类、托盘类四向穿梭车的测试和同层多台车调度系统的开发。另外,还可以应用于多层穿梭车、穿梭式子母车及穿梭板车的功能测试。